当前位置:网站首页>Moveit2 - 4. robot model and robot state
Moveit2 - 4. robot model and robot state
2022-07-27 11:23:00 【babyrtsh .】
Robot model and robot state

In this tutorial , Will guide you to understand MoveIt2 Using kinematics C++ API.
RobotModel and RobotState class
RobotModel and RobotState Class is MoveIt2 The core of the class , Allows users to access robot kinematics .
RobotModel Class contains all the relationships between links and joints , Ranging from URDF Loaded joint limits and other attributes .RobotModel Classes also divide the links and joints of robots into SRDF Multiple planning groups defined in . You can find information about URDF and SRDF A separate tutorial :URDF and SRDF course
RobotState Class contains information about the robot at a certain point in time , Store joint position vectors and optional speeds and accelerations . This information can be used to obtain kinematic information about the robot , This information depends on the current state of the robot , For example, the Jacobian matrix of the end effector .
RobotState The class also contains functions for determining the position of the end effector ( Cartesian pose ) Auxiliary functions for setting arm position and calculating Cartesian trajectory .
In this tutorial example , It will gradually guide users to understand these classes in Panda Processes used on robots .
Run code
All the code in this tutorial can be viewed as MoveIt2 Install one of the components moveit2_tutorials Compile and run in the software package .
Use ros2 launch The order comes directly from moveit2_tutorials The startup file in the software package to run the code :
ros2 launch moveit2_tutorials robot_model_and_robot_state_tutorial.launch.py
Expected output
The expected output will take the following form . Because the random joint value is used here , So the numbers will be different :
... [robot_model_and_state_tutorial]: Model frame: world
... [robot_model_and_state_tutorial]: Joint panda_joint1: 0.000000
... [robot_model_and_state_tutorial]: Joint panda_joint2: 0.000000
... [robot_model_and_state_tutorial]: Joint panda_joint3: 0.000000
... [robot_model_and_state_tutorial]: Joint panda_joint4: 0.000000
... [robot_model_and_state_tutorial]: Joint panda_joint5: 0.000000
... [robot_model_and_state_tutorial]: Joint panda_joint6: 0.000000
... [robot_model_and_state_tutorial]: Joint panda_joint7: 0.000000
... [robot_model_and_state_tutorial]: Current state is not valid
... [robot_model_and_state_tutorial]: Current state is valid
... [robot_model_and_state_tutorial]: Translation:
-0.368232
0.645742
0.752193
... [robot_model_and_state_tutorial]: Rotation:
0.362374 -0.925408 -0.11093
0.911735 0.327259 0.248275
-0.193453 -0.191108 0.962317
... [robot_model_and_state_tutorial]: Joint panda_joint1: 2.263889
... [robot_model_and_state_tutorial]: Joint panda_joint2: 1.004608
... [robot_model_and_state_tutorial]: Joint panda_joint3: -1.125652
... [robot_model_and_state_tutorial]: Joint panda_joint4: -0.278822
... [robot_model_and_state_tutorial]: Joint panda_joint5: -2.150242
... [robot_model_and_state_tutorial]: Joint panda_joint6: 2.274891
... [robot_model_and_state_tutorial]: Joint panda_joint7: -0.774846
... [robot_model_and_state_tutorial]: Jacobian:
-0.645742 -0.26783 -0.0742358 -0.315413 0.0224927 -0.031807 -2.77556e-17
-0.368232 0.322474 0.0285092 -0.364197 0.00993438 0.072356 2.77556e-17
0 -0.732023 -0.109128 0.218716 2.9777e-05 -0.11378 -1.04083e-17
0 -0.769274 -0.539217 0.640569 -0.36792 -0.91475 -0.11093
0 -0.638919 0.64923 -0.0973283 0.831769 -0.40402 0.248275
1 4.89664e-12 0.536419 0.761708 0.415688 -0.00121099 0.962317
notes : If your output has different ROS Console format , Please don't worry .
Complete code
start-up
Use RobotModel Class is very simple . Usually , You will find that most of the more advanced components will return a point RobotModel Class shared pointer . If possible , You should always use this pointer . In this example , Such a shared pointer will be used to start , And only the basic API. You can view the actual code of these classes API, For more details on how to use the more functionality provided by these classes .
We will first instantiate a RobotModelLoader object , The object will be in ROS Find the robot description on the parameter server and build a RobotModel For our use .
robot_model_loader::RobotModelLoader robot_model_loader(node);
const moveit::core::RobotModelPtr& kinematic_model = robot_model_loader.getModel();
RCLCPP_INFO(LOGGER, "Model frame: %s", kinematic_model->getModelFrame().c_str());
Use RobotModel, We can build a RobotState To maintain the configuration of the robot . We set all joints in this state to the default value . Then you can get one JointModelGroup, It represents a robot model of a specific planning group , for example Panda Robotic “panda_arm” Planning Group .
moveit::core::RobotStatePtr kinematic_state(new moveit::core::RobotState(kinematic_model));
kinematic_state->setToDefaultValues();
const moveit::core::JointModelGroup* joint_model_group = kinematic_model->getJointModelGroup("panda_arm");
const std::vector<std::string>& joint_names = joint_model_group->getVariableNames();
Get joint values
We can retrieve stored in Panda The current set of joint values in the arm planning group state :
std::vector<double> joint_values;
kinematic_state->copyJointGroupPositions(joint_model_group, joint_values);
for (std::size_t i = 0; i < joint_names.size(); ++i)
{
RCLCPP_INFO(LOGGER, "Joint %s: %f", joint_names[i].c_str(), joint_values[i]);
}
Joint limitation
function setJointGroupPositions() Joint restrictions are not enforced by itself , But the call enforceBounds() Function will execute joint restriction .
/* Set one joint in the Panda arm outside its joint limit */
joint_values[0] = 5.57;
kinematic_state->setJointGroupPositions(joint_model_group, joint_values);
/* Check whether any joint is outside its joint limits */
RCLCPP_INFO_STREAM(LOGGER, "Current state is " << (kinematic_state->satisfiesBounds() ? "valid" : "not valid"));
/* Enforce the joint limits for this state and check again*/
kinematic_state->enforceBounds();
RCLCPP_INFO_STREAM(LOGGER, "Current state is " << (kinematic_state->satisfiesBounds() ? "valid" : "not valid"));
Forward kinematics
Now? , We can calculate the forward kinematics of a set of random joint values (FK). Please note that , Here we want to find robots “panda_arm” The farthest link in the planning group “panda_link8” The position of .
kinematic_state->setToRandomPositions(joint_model_group);
const Eigen::Isometry3d& end_effector_state = kinematic_state->getGlobalLinkTransform("panda_link8");
/* Print end-effector pose. Remember that this is in the model frame */
RCLCPP_INFO_STREAM(LOGGER, "Translation: \n" << end_effector_state.translation() << "\n");
RCLCPP_INFO_STREAM(LOGGER, "Rotation: \n" << end_effector_state.rotation() << "\n");
Inverse kinematics
We can do it now for Panda Robot solves inverse kinematics (IK). Demand solution IK, We need the following information :
Desired posture of the end actuator ( By default “panda_arm” The last link in the chain ): That is, calculated in the previous step end_effector_state.
Timeout time :0.1s
double timeout = 0.1;
bool found_ik = kinematic_state->setFromIK(joint_model_group, end_effector_state, timeout);
Now? , We can print out this IK Solution results ( If it is solved ):
if (found_ik)
{
kinematic_state->copyJointGroupPositions(joint_model_group, joint_values);
for (std::size_t i = 0; i < joint_names.size(); ++i)
{
RCLCPP_INFO(LOGGER, "Joint %s: %f", joint_names[i].c_str(), joint_values[i]);
}
}
else
{
RCLCPP_INFO(LOGGER, "Did not find IK solution");
}
Get Jacobian matrix
We can also from RobotState Get Jacobian matrix :
Eigen::Vector3d reference_point_position(0.0, 0.0, 0.0);
Eigen::MatrixXd jacobian;
kinematic_state->getJacobian(joint_model_group,
kinematic_state->getLinkModel(joint_model_group->getLinkModelNames().back()),
reference_point_position, jacobian);
RCLCPP_INFO_STREAM(LOGGER, "Jacobian: \n" << jacobian << "\n");
launch file
To run this code , Need a startup file , The startup file should complete the following two things :
take Panda Robotic URDF and SRDF Load to parameter server ;
take MoveIt Set assistant generated kinematics_solver Configure push to ROS The parameter server instantiates the node namespace of each class in this tutorial .
import os
import yaml
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import ExecuteProcess
from ament_index_python.packages import get_package_share_directory
import xacro
def load_file(package_name, file_path):
package_path = get_package_share_directory(package_name)
absolute_file_path = os.path.join(package_path, file_path)
try:
with open(absolute_file_path, "r") as file:
return file.read()
except EnvironmentError: # parent of IOError, OSError *and* WindowsError where available
return None
def load_yaml(package_name, file_path):
package_path = get_package_share_directory(package_name)
absolute_file_path = os.path.join(package_path, file_path)
try:
with open(absolute_file_path, "r") as file:
return yaml.safe_load(file)
except EnvironmentError: # parent of IOError, OSError *and* WindowsError where available
return None
def generate_launch_description():
# planning_context
robot_description_config = load_file(
"moveit_resources_panda_description", "urdf/panda.urdf"
)
robot_description_semantic_config = load_file(
"moveit_resources_panda_moveit_config", "config/panda.srdf"
)
kinematics_yaml = load_yaml(
"moveit_resources_panda_moveit_config", "config/kinematics.yaml"
)
tutorial_node = Node(
package="moveit2_tutorials",
executable="robot_model_and_robot_state_tutorial",
output="screen",
parameters=[
{
"robot_description": robot_description_config},
{
"robot_description_semantic": robot_description_semantic_config},
kinematics_yaml,
],
)
return LaunchDescription([tutorial_node])
边栏推荐
- Longest ascending subsequence model acwing 482. Chorus formation
- Knapsack model acwing 423. Picking herbs
- Yonbuilder enables innovation, and the "golden keyboard Award" of the fourth UFIDA developer competition is open!
- 最长上升子序列模型 AcWing 272. 最长公共上升子序列
- Where is the big data open source project, one-stop fully automated full life cycle operation and maintenance steward Chengying (background)?
- 14 check whether integers and their multiples exist
- 背包模型 AcWing 1024. 装箱问题
- 求组合数 AcWing 886. 求组合数 II
- 最长上升子序列模型 AcWing 1014. 登山
- Verilog implementation of ECG signal acquisition, storage and transmission system based on FPGA
猜你喜欢

求组合数 AcWing 885. 求组合数 I

Backpack model acwing 1022. Collection of pet elves
Game theory acwing 893. Set Nim game

49 letter ectopic grouping and 242 effective letter ectopic words
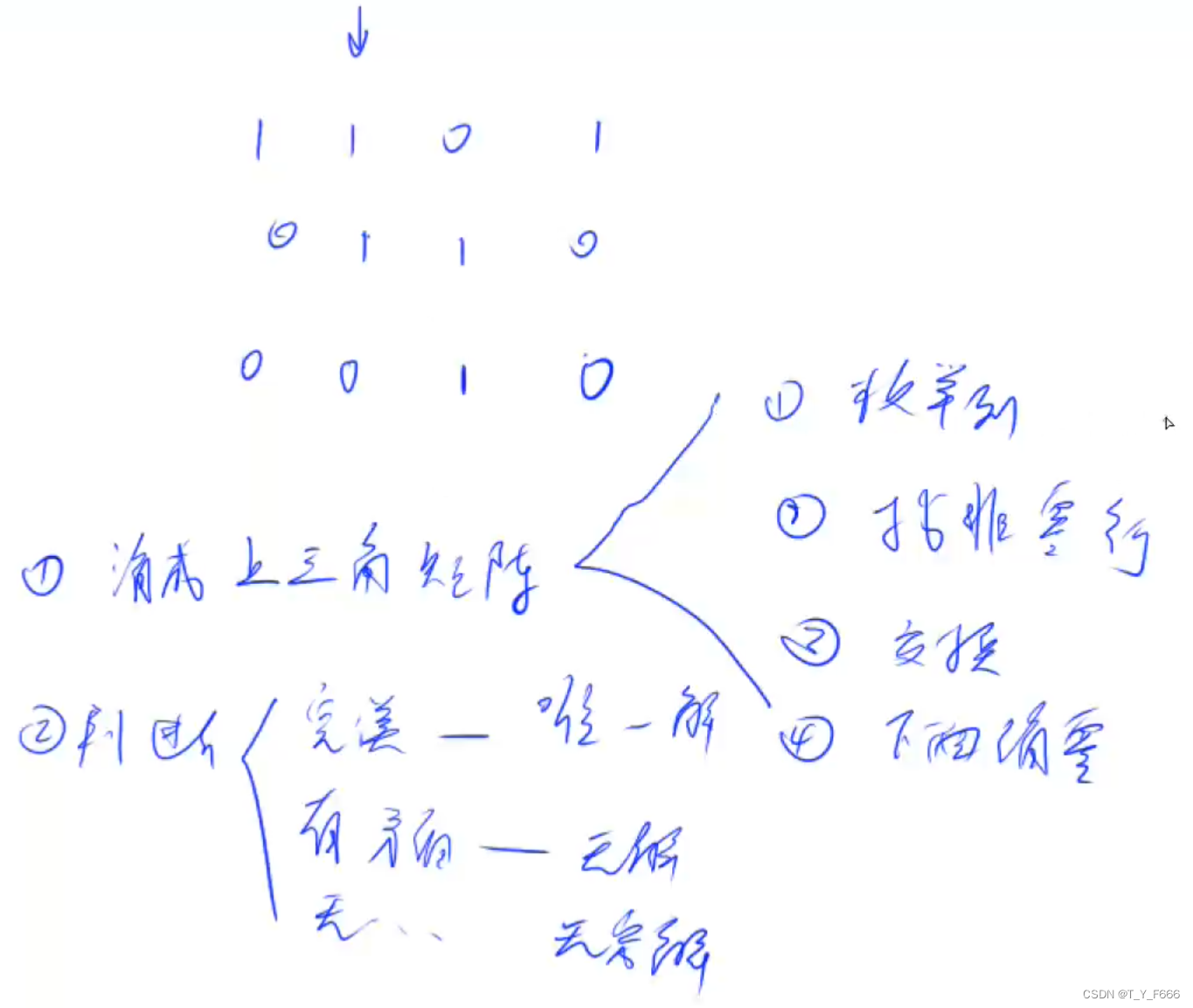
高斯消元 AcWing 884. 高斯消元解异或线性方程组
Longest ascending subsequence model acwing 482. Chorus formation
最长上升子序列模型 AcWing 1012. 友好城市

Solve importerror: cannot import name'abs'import tensorflow error

tensorflow运行报错解决方法
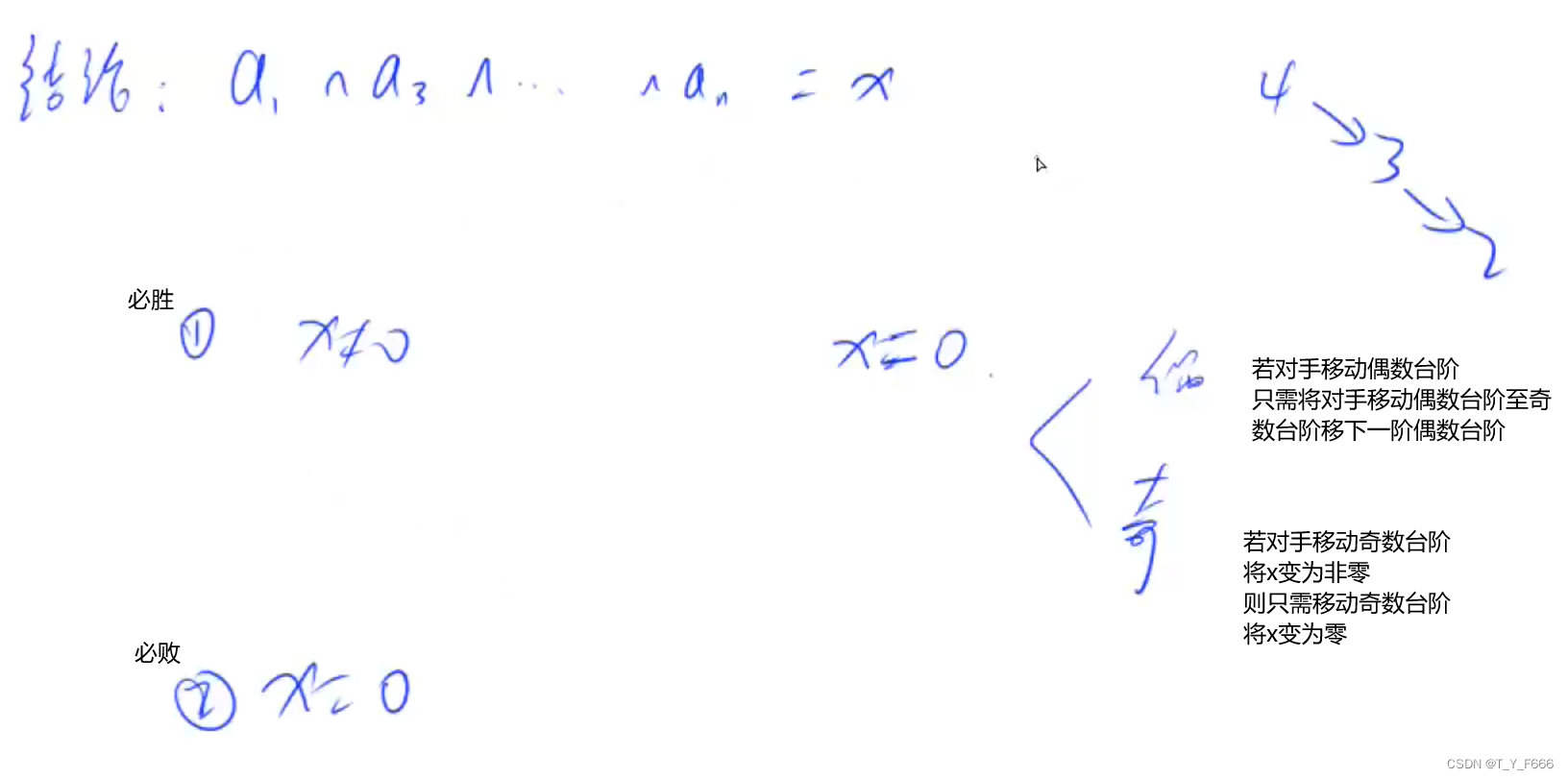
博弈论 AcWing 892. 台阶-Nim游戏
随机推荐
JVM judges that the object is dead, and practices verify GC recycling
Wechat push - template message parameter configuration
Wenzhou University X kangaroo cloud: how to "know well" in the construction of higher talent education
Luogu p1441 weight weighing
[shader realizes shake random shaking effect _shader effect Chapter 10]
349两个数组的交集和01两数之和
Knapsack model acwing 1024. Packing problem
Win10 vscode code code format setting and remote breakpoint debugging
容斥原理 AcWing 890. 能被整除的数
XXX packages are looking for funding run 'NPM fund' for details solutions
什么是私域流量?
2022 Niuke multi school (3) j.journey
Redis+caffeine two-level cache enables smooth access speed
IO流_字符流、IO流小结、IO流案例总结
Solutions to errors in tensorflow operation
10 complete half of the questions
(4) Operator
11 wrong set
Today's code farmer girl learned notes about event operation and ref attribute, and did the practice of form two-way binding
NFT leaderboard -nft real offer latest address: NFT leaderboard.com