当前位置:网站首页>A blog to thoroughly master the theory and practice of particle filter (PF) (matlab version)
A blog to thoroughly master the theory and practice of particle filter (PF) (matlab version)
2022-06-26 15:25:00 【Skull II】
Application of particle filter in target tracking : Particle filtering VS Unscented Kalman filter
Particle filtering — From Bayesian filter to particle filter theory to practice
Originality is not easy. , Please give a compliment to all the big guys passing by
Maneuvering target tracking / Nonlinear filtering / Sensor fusion / Navigation, etc. discuss code connection WX: ZB823618313
Particle filtering — From Bayesian filter to particle filter theory to practice
- Application of particle filter in target tracking : Particle filtering VS Unscented Kalman filter
- Particle filtering — From Bayesian filter to particle filter theory to practice
Under nonlinear conditions , An important problem in Bayesian filtering is the expression of state distribution and the solution of integral formula , From the analysis in the previous chapter , For general nonlinearity / Non Gaussian system , Analytic solution is not feasible . In numerical approximation , Monte Carlo simulation is one of the most general 、 Effective means , Particle filter is based on Monte Carlo simulation , It approximates the statistical distribution of states by using a set of weighted system state samples . Because Monte Carlo simulation method has wide applicability , The particle filter algorithm can also be applied to general nonlinear systems / Non Gaussian system . however , This filtering method also faces several important problems , Such as effective sampling ( The particle ) How to produce 、 How to transfer particles and how to get the sequential estimation of the system state .
Simple understanding , Particle filter uses a large number of random samples , Using Monte Carlo (MonteCarlo,MC) Simulation technology completes Bayesian recursive filtering (Recursive Bayesian Filter) The process . So this blog starts from Bayesian filtering , A brief introduction to particle filter PF The birth of 、 Application
1、 Problem description
Consider the dynamic model of discrete-time nonlinear systems ,
x k = f ( x k − 1 , w k − 1 ) z k = h ( x k , v k ) (1) x_k=f(x_{k-1},w_{k-1}) \\ z_k=h(x_k,v_k ) \tag{1} xk=f(xk−1,wk−1)zk=h(xk,vk)(1)
among x k x_k xk by k k k Target state vector at time , z k z_k zk by k k k Time measurement vector ( Sensor data ). The controller is not considered here u k u_k uk. w k {w_k} wk and v k {v_k} vk They are process noise sequence and measurement noise sequence . w k w_k wk and v k v_k vk Zero mean Gaussian white noise .
Because the recursive form of Bayesian filtering is based on the posterior probability density of nonlinear systems , So there is no need to assume w k w_k wk and v k v_k vk Zero mean Gaussian white noise . and KF、EKF、CKF、QKF And so on 、 The measurement noise is Gaussian white noise .
Therefore, particle filter based on Bayesian filter can deal with nonlinear and non Gaussian state estimation problems .
Definition 1 1 1 ~ k k k Time to state x k x_k xk All measured data of are
z k = [ z 1 T , z 2 T , ⋯ , z k T ] T z^k=[z_1^T,z_2^T,\cdots,z_k^T]^T zk=[z1T,z2T,⋯,zkT]T
The problem of Bayesian filtering is to calculate the right k k k Time state x x x The degree of confidence in the estimate , Therefore, the probability density function is constructed p ( x k ∣ z k ) p(x_k |z^k) p(xk∣zk), At a given initial distribution p ( x 0 ∣ z 0 ) = p ( x 0 ) p(x_0|z_0)= p(x_0) p(x0∣z0)=p(x0) after , In theory , The probability density function can be recursively obtained through two steps of prediction and update p ( x k ∣ z k ) p(x_k |z^k) p(xk∣zk) Value .
Is there a rudiment of Kalman filter , Ha ha ha , forecast 、 Updates also exist KF in .
2、 Recursive Bayesian filtering
1) forecast
Now suppose k − 1 k- 1 k−1 The probability density function of time is known , Then by putting Chapman-Kolmogorov Equation application
In dynamic equation (1), Can predict k k k The prior probability density function of the time state is
p ( x k ∣ z k − 1 ) = ∫ p ( x k ∣ x k − 1 ) p ( k − 1 ∣ z k − 1 ) d x k − 1 ) (2) p(x_k |z^{k-1})=\int p(x_k |x_{k-1})p({k-1} |z^{k-1}) dx_{k-1}) \tag{2} p(xk∣zk−1)=∫p(xk∣xk−1)p(k−1∣zk−1)dxk−1)(2)
actually , The state transition equation is written in the form of probability density : x k = f ( x k − 1 , w k − 1 ) = Equivalent p ( x k ∣ x k − 1 ) x_k=f(x_{k-1},w_{k-1}) \underset{\text{ Equivalent }}= p(x_k |x_{k-1}) xk=f(xk−1,wk−1) Equivalent =p(xk∣xk−1)
type (2) It implicitly assumes that p ( x k ∣ x k − 1 ) = p ( x k ∣ x k − 1 , z k − 1 ) p(x_k |x_{k-1})= p(x_k |x_{k-1}, z^{k-1}) p(xk∣xk−1)=p(xk∣xk−1,zk−1), In fact, this itself is established here , be based on (1) Markov process of formula .
2) to update
In obtaining p ( x k ∣ z k − 1 ) p(x_k |z^{k-1}) p(xk∣zk−1) On the basis of , combination k k k New measured value obtained at any time , Based on Bayes formula , You can calculate k k k The posterior probability density function of the time state :
p ( x k ∣ z k ) = p ( z k ∣ x k ) p ( x k ∣ z k − 1 ) p ( z k ∣ z k − 1 ) (3) p(x_k |z^{k})=\frac{p(z_k |x_k)p(x_k |z^{k-1})}{p(z_k |z^{k-1})} \tag{3} p(xk∣zk)=p(zk∣zk−1)p(zk∣xk)p(xk∣zk−1)(3)
Where the molecule p ( z k ∣ z k − 1 ) p(z_k |z^{k-1}) p(zk∣zk−1) There is a full probability formula to get
p ( z k ∣ z k − 1 ) = ∫ p ( z k ∣ x k ) p ( x k ∣ z k − 1 ) d x k (4) p(z_k |z^{k-1})=\int p(z_k |x_k)p(x_k |z^{k-1}) dx_{k} \tag{4} p(zk∣zk−1)=∫p(zk∣xk)p(xk∣zk−1)dxk(4)
I'll just say , The above process is actually the formula deduced by Bayes Houyan , Ha ha ha ha ha
In fact, this is also the updated idea of Kalman filter : stay k k k Time is measured z k z_k zk after , Use measurements z k z_k zk Modified a priori probability , Then the posterior probability of the current time state is obtained . I am just too clever , Ha ha ha
3) be based on p ( x k ∣ z k ) p(x_k |z^{k}) p(xk∣zk) A variety of filters
Tell the truth , You're about status x k x_k xk The probability density function of ( Distribution ) All of them , Is it difficult to ascertain their various estimates ?
Here's a reminder for all those who are destined to be , In fact, various filters 、 It is estimated that p ( x k ∣ z k ) p(x_k |z^{k}) p(xk∣zk) The first moment of ( x k x_k xk Estimation ) And the second moment ( Estimated partners ).( Jicao 、 Do not 6)
type (3) This paper describes an example of k − 1 k-1 k−1 A posteriori probability density function of time is k k k The complete process of recursion of time posterior probability density function , Thus, a general expression of the optimal solution of Bayesian estimation is formed . And then through the posterior distribution p ( x k ∣ z k ) p(x_k |z^{k}) p(xk∣zk) Under different criteria x x x The optimal estimation plan .
Such as minimum mean square error (MMSE) It is estimated that :
x ^ k = E [ x k ∣ z k ] = ∫ x k p ( x k ∣ z k ) d x k (5) \hat{x}_k=E[x_k|z_k]=\int x_kp(x_k |z^{k}) dx_k \tag{5} x^k=E[xk∣zk]=∫xkp(xk∣zk)dxk(5)
Maximum posteriori (MAP) It is estimated that :
x ^ k = arg min x k p ( x k ∣ z k ) \hat{x}_k=\arg \min_{x_k} p(x_k |z^{k}) x^k=argxkminp(xk∣zk)
In fact, particle filter is based on Monte Carlo technology 、 The recursive process is realized by a large number of samples .
Did you see this , There is a sense of openness , In fact, the above introduction and derivation are simplified versions , I also added some stupid understanding to it , So there are some misunderstandings 、 For high-level people 、 It is suggested that the classic works are the most useful and rigorous .
3、 Standard particle filter PF
The core idea : Is to use a group of random samples with corresponding weights ( The particle ) To represent the posterior distribution of States . The basic idea of this method is to select an importance probability density and random sampling from it , Get some random samples with corresponding weights , Adjust the weight based on the state observation . And the position of the particles , These samples are then used to approximate the state posterior distribution , Finally, the weighted sum of these samples is taken as the estimated value of the state . Particle filter is not constrained by the linear and Gaussian assumptions of the system model , The state probability density is described in the form of sample rather than function , So that it does not need too many constraints on the probability distribution of state variables , So it is widely used in nonlinear non Gaussian dynamic systems . For all that , At present, the computation of particle filter is still too large 、 Key problems such as particle degradation need to be solved .
Particle filter is actually based on recursive Bayesian filter MMSE(5) Approximate realization of estimation , The approximate method is Monte Carlo method . Many people should understand why particle filter should be mentioned as Bayesian filter .
Usually, a priori distribution is chosen as the importance density function 、 namely
q ( x k ∣ x k − 1 ( i ) , z k ) = p ( x k ∣ x k − 1 ( i ) ) q(x_k |x_{k-1}^{(i)}, z_{k})=p(x_k |x_{k-1}^{(i)}) q(xk∣xk−1(i),zk)=p(xk∣xk−1(i))
The importance weight of this function is
w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))
Again w k ( i ) w_k^{(i)} wk(i) Normalization is required to obtain w ~ k ( i ) \tilde{w}_k^{(i)} w~k(i).
The standard particle filter algorithm steps are :
Particle filtering PF:
Step 1: according to p ( x 0 ) p(x_{0}) p(x0) Sampling to get N N N A particle x 0 ( i ) ∼ p ( x 0 ) x_0^{(i)} \sim p(x_{0}) x0(i)∼p(x0)
For i = 2 : N i=2:N i=2:N
Step 2: The new particle generated from the state transition function is :$ x k ( i ) ∼ p ( x k ∣ x k − 1 ( i ) ) x_k^{(i)} \sim p(x_{k} |x_{k-1}^{(i)}) xk(i)∼p(xk∣xk−1(i))
Step 3: Calculate the importance weight : w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))
Step 4: Normalized importance weight : w ~ k ( i ) = w k ( i ) ∑ j = 1 N w k ( j ) \tilde{w}_k^{(i)}=\frac{w_k^{(i)}}{\sum_{j=1}^Nw_k^{(j)}} w~k(i)=∑j=1Nwk(j)wk(i)
Step 5: Resample particles using resample method ( Take system resampling as an example )( Meet? )
Step 6: obtain k k k A posteriori state estimation of time :
E [ x ^ k ] = ∑ i = 1 N x k ( i ) w ~ k ( i ) E[\hat{x}_{k}]= \sum_{i=1}^Nx_{k}^{(i)}\tilde{w}_k^{(i)} E[x^k]=i=1∑Nxk(i)w~k(i)
End For
Particle filtering PF Algorithm structure diagram 
Algorithm : System resampling (systematic resampling)
For i = 1 : N i=1:N i=1:N
Step 1: Initialize the cumulative probability density function CDF: c 1 = 0 c_1=0 c1=0
For i = 2 : N i=2:N i=2:N
Step 2: structure CDF: c i = c i − 1 + w k ( i ) c_i=c_{i-1}+w_k^{(i)} ci=ci−1+wk(i)
Step 3: from CDF Start at the bottom of : i = 1 i=1 i=1
Step 4: Sampling starting point : u 1 = U [ 0 , 1 / N ] u_1=\mathcal{U}[0,1/N] u1=U[0,1/N]
End For
For j = 1 : N j=1:N j=1:N
Step 5: Along the CDF Move : u j = u 1 + ( j − 1 ) / N u_j=u_{1}+(j-1)/N uj=u1+(j−1)/N
Step 6: While u j > c i u_j>c_i uj>ci
i = i + 1 i=i+1 i=i+1
End While
Step 7: Assignment particle : x k ( j ) = x k ( i ) x_k^{(j)}=x_k^{(i)} xk(j)=xk(i)
Step 8: Assignment weight : w k ( j ) = 1 / N w_k^{(j)}=1/N wk(j)=1/N
Step 9: Assign parent : i ( j ) = i i^{(j)}=i i(j)=i
End For
The idea of resampling is : Since those with small weights don't work , Then don't . To keep the number of particles constant , They have to be replaced by some new particles . The easiest way to find new particles is to copy a few more heavy particles , As for copying a few ? Let them distribute among the heavy particles according to their proportion of weight , That is, the boss gets the most , The second one gets more points , And so on . The following is a mathematical description .
In addition to the system resampling method , There are several resampling methods :
Polynomial resampling
Residual resampling
Random resampling
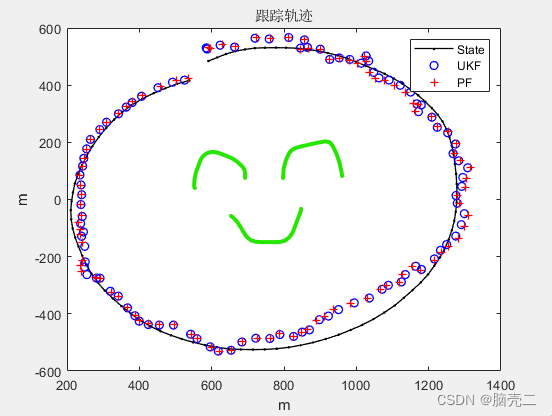
5、 Particle filtering PF In target tracking applications :
5.1、 Simulation parameters
** One 、 Target model :CT( See another blog for details ) **
X k + 1 = [ 1 sin ( ω T ) ω 0 − 1 − cos ( ω T ) ω 0 cos ( ω T ) 0 − sin ( ω T ) 0 1 − cos ( ω T ) ω 1 sin ( ω T ) ω 0 sin ( ω T ) 0 cos ( ω T ) ] X k + [ T 2 / 2 0 T 0 0 T 2 / 2 0 T ] W k X_{k+1}=\begin{bmatrix}1&\frac{\sin(\omega T)}{\omega}&0&-\frac{1-\cos(\omega T)}{\omega}\\0&\cos(\omega T)&0&-\sin(\omega T)\\0&\frac{1-\cos(\omega T)}{\omega}&1&\frac{\sin(\omega T)}{\omega}\\0&\sin(\omega T)&0&\cos(\omega T)\end{bmatrix}X_{k} + \begin{bmatrix}T^2/2&0\\T&0\\0&T^2/2\\0&T\end{bmatrix}W_k Xk+1=⎣⎢⎢⎡1000ωsin(ωT)cos(ωT)ω1−cos(ωT)sin(ωT)0010−ω1−cos(ωT)−sin(ωT)ωsin(ωT)cos(ωT)⎦⎥⎥⎤Xk+⎣⎢⎢⎡T2/2T0000T2/2T⎦⎥⎥⎤Wk
CV CT See another blog for the specific equation form of the model
Two 、 Measurement model :2D Active radar
In two dimensions , Radar measurements are range and angle
r k m = r k + r ~ k b k m = b k + b ~ k {r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k rkm=rk+r~kbkm=bk+b~k
among
r k = ( x k − x 0 ) + ( y k − y 0 ) 2 ) b k = tan − 1 y k − y 0 x k − x 0 r_k=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ rk=(xk−x0)+(yk−y0)2)bk=tan−1xk−x0yk−y0
[ x 0 , y 0 ] [x_0,y_0] [x0,y0] Is radar coordinates , The general situation is 0. Radar measurement is z k = [ r k , b k ] ′ z_k=[r_k,b_k]' zk=[rk,bk]′. The radar measurement variance is
R k = cov ( v k ) = [ σ r 2 0 0 σ b 2 ] R_k=\text{cov}(v_k)=\begin{bmatrix}\sigma_r^2 & 0 \\0 & \sigma_b^2 \end{bmatrix} Rk=cov(vk)=[σr200σb2]
5.2、 Track and error

6、 Particle filtering PF Standard validation model for
6.1、 Model parameters
State model :
x ( k ) = f ( x ( k − 1 ) , k ) + w ( k − 1 ) x(k) = f (x(k-1), k) + w(k-1) x(k)=f(x(k−1),k)+w(k−1)
among
f ( x ( ( k − 1 ) , k ) = 0.5 x ( k − 1 ) + 2.5 x ( k − 1 ) / ( 1 + x ( k − 1 ) 2 ) + 8 cos ( 1.2 k ) f(x((k-1), k) = 0.5x(k-1) + 2.5x(k-1) / (1+x(k-1)^2) + 8\cos(1.2k) f(x((k−1),k)=0.5x(k−1)+2.5x(k−1)/(1+x(k−1)2)+8cos(1.2k)
The measurement equation is :
z ( k ) = x ( k ) 2 / 20 + v ( k ) z(k) = x(k)^2 / 20 +v(k) z(k)=x(k)2/20+v(k)
w ( k ) w(k) w(k), v ( k ) v(k) v(k) The mean is 0 0 0、 The variances are Q ( k ) = 10 Q(k)=10 Q(k)=10, R ( k ) = 1 R(k)=1 R(k)=1 Gaussian noise of . state x ( k ) x(k) x(k) And x ( k − 1 ) x(k-1) x(k−1) It is a nonlinear relation , In the observation equation z ( k ) z(k) z(k) and x ( k ) (k) (k) It is also a non-linear relationship .
6.2、 Particle filter based on random resampling PF


6.3、 Particle filter based on polynomial resampling PF

6.4、 Resampling particle filter based on residuals PF

6.5、 Particle filter based on system resampling PF

6.6、 Particle filter based on system resampling PF Code
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% Particle filter one-dimensional system simulation
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function ParticleFilter_standardmodel
clear all;close all;clc;
randn('seed',1); % In order to ensure that the results of each run are consistent , The seed point of a given random number
% Initialize related parameters
T=50;% Number of sampling points
dt=1;% Sampling period
Q=10;% Process noise variance
R=1;% Measure noise variance
v=sqrt(R)*randn(T,1);% Measuring noise
w=sqrt(Q)*randn(T,1);% Process noise
numSamples=100;% Number of particles
%%%%%%%%%%%%%%%%%%%%%%%%%%%
x0=0.1;% The initial state
% Generate true states and observations
X=zeros(T,1);% True state
Z=zeros(T,1);% Measurement
X(1,1)=x0;% Real state initialization
Z(1,1)=(X(1,1)^2)./20+v(1,1);% Observation initialization
for k=2:T
% Equation of state
X(k,1)=0.5*X(k-1,1)+2.5*X(k-1,1)/(1+X(k-1,1)^2)+8*cos(1.2*k)+w(k-1,1);
% The observation equation
Z(k,1)=(X(k,1).^2)./20+v(k,1);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Particle filter initialization , It needs to be set to store the filter estimation state , Particle set , Weight and so on
Xpf=zeros(numSamples,T);% Particle filter estimates the state
Xparticles=zeros(numSamples,T);% Particle set
Zpre_pf=zeros(numSamples,T);% Particle filter observation prediction value
weight=zeros(numSamples,T);% Weight initialization
% Initial sampling of a given state and observation prediction :
Xpf(:,1)=x0+sqrt(Q)*randn(numSamples,1);
Zpre_pf(:,1)=Xpf(:,1).^2/20;
% Update and forecast process
for k=2:T
% First step : Particle collection sampling process
for i=1:numSamples
QQ=Q;% Different from Kalman filter , there Q It is not required to be consistent with the process noise variance
net=sqrt(QQ)*randn;% there QQ It can be regarded as the radius of the net , Adjustable value
Xparticles(i,k)=0.5.*Xpf(i,k-1)+2.5.*Xpf(i,k-1)./(1+Xpf(i,k-1).^2)+8*cos(1.2*k)+net;
end
% The second step : For each particle in the particle set , Calculate its importance weight
for i=1:numSamples
Zpre_pf(i,k)=Xparticles(i,k)^2/20;
weight(i,k)=exp(-.5*R^(-1)*(Z(k,1)-Zpre_pf(i,k))^2);% The constant term is omitted
end
weight(:,k)=weight(:,k)./sum(weight(:,k));% Normalized weight
% The third step : Resample the particle set according to the weight , Weight set and particle set are one-to-one corresponding
% Select a sampling policy
outIndex = systematicR(weight(:,k)');
% Step four : According to the index obtained by resampling , To pick the corresponding particle , The reconstructed set is the filtered state set
% Find the mean of this set of states , Is the final target state 、
Xpf(:,k)=Xparticles(outIndex,k);
end
% Calculate a posteriori mean estimate 、 Maximum a posteriori estimate and estimated variance
Xmean_pf=mean(Xpf);% A posteriori mean estimation , And step 4 above , That is, the final state of particle filter estimation
bins=20;
Xmap_pf=zeros(T,1);
for k=1:T
[p,pos]=hist(Xpf(:,k,1),bins);
map=find(p==max(p));
Xmap_pf(k,1)=pos(map(1));% Maximum posterior estimate
end
for k=1:T
Xstd_pf(1,k)=std(Xpf(:,k)-X(k,1));% A posteriori error standard deviation estimation
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% drawing
figure();clf;% Process noise and measurement noise diagram
subplot(221);
plot(v);% Measuring noise
xlabel(' Time ');ylabel(' Measuring noise ');
subplot(222);
plot(w);% Process noise
xlabel(' Time ');ylabel(' Process noise ');
subplot(223);
plot(X);% True state
xlabel(' Time ');ylabel(' state X');
subplot(224);
plot(Z);% Observed value
xlabel(' Time ');ylabel(' observation Z');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure();
k=1:dt:T;
plot(k,X,'.-k',k,Xmean_pf,'--ro',k,Xmap_pf,'-.g+','LineWidth',1);% notes :Xmean_pf Is the result of particle filter
legend(' True state value of the system ',' A posteriori mean estimation ',' Maximum posterior probability estimation ');
xlabel(' Time ');ylabel(' State estimation ');
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure();
subplot(121);
plot(Xmean_pf,X,'+');% The estimated value of particle filter is consistent with the real state value 1:1 Relationship , Will be symmetrically distributed
xlabel(' A posteriori mean estimation ');ylabel(' Truth value ');
hold on;
c=-25:1:25;
plot(c,c,'r');% Draw a red symmetry line y=x
hold off;
subplot(122);% The maximum a posteriori estimate is proportional to the true state value 1:1 Relationship , Will be symmetrically distributed
plot(Xmap_pf,X,'+');
xlabel('Map It is estimated that ');ylabel(' Truth value ');
hold on;
c=-25:25;
plot(c,c,'r');% Draw a red symmetry line y=x
hold off;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Draw a histogram , This graph is to see the posterior density of the particle set
domain=zeros(numSamples,1);
range=zeros(numSamples,1);
bins=10;
support=[-20:1:20];
figure();
hold on;% Histogram
xlabel(' Time ');ylabel(' sample space ');
vect=[0 1];
caxis(vect);
for k=1:T
% The histogram reflects the distribution of the filtered particle set
[range,domain]=hist(Xpf(:,k),support);
% call waterfall function , Draw the histogram data
waterfall(domain,k,range);
end
axis([-20 20 0 T 0 100]);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure();
xlabel(' sample space ');ylabel(' Posterior density ');
k=30;%k=? Indicates the overlapping relationship between the particle distribution and the real state value at the time of viewing
[range,domain]=hist(Xpf(:,k),support);
plot(domain,range);
% The position of the real state in the sample space , Draw a red line to indicate
XXX=[X(k,1),X(k,1)];
YYY=[0,max(range)+10];
line(XXX,YYY,'Color','r');
axis([min(domain) max(domain) 0 max(range)+10]);
figure();
k=1:dt:T;
plot(k,Xstd_pf,'-ro','LineWidth',1);
xlabel(' Time ');ylabel(' Standard deviation of state estimation error ');
axis([0,T,0,10]);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% The system reacquires the appearance function
% Input parameters :weight Is the weight corresponding to the original data
% Output parameters :outIndex It's based on weight Filter and copy results
function outIndex = systematicR(weight);
N=length(weight);
N_children=zeros(1,N);
label=zeros(1,N);
label=1:1:N;
s=1/N;
auxw=0;
auxl=0;
li=0;
T=s*rand(1);
j=1;
Q=0;
i=0;
u=rand(1,N);
while (T<1)
if (Q>T)
T=T+s;
N_children(1,li)=N_children(1,li)+1;
else
i=fix((N-j+1)*u(1,j))+j;
auxw=weight(1,i);
li=label(1,i);
Q=Q+auxw;
weight(1,i)=weight(1,j);
label(1,i)=label(1,j);
j=j+1;
end
end
index=1;
for i=1:N
if (N_children(1,i)>0)
for j=index:index+N_children(1,i)-1
outIndex(j) = i;
end;
end;
index= index+N_children(1,i);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
PF Mom Bayesian filtering Part-I、 Monte Carlo method Part-II、 Sequential resampling Part-III
Originality is not easy. , Please give a compliment to all the big guys passing by
边栏推荐
- Applicable and inapplicable scenarios of mongodb series
- [tcapulusdb knowledge base] tcapulusdb system user group introduction
- MongoDB系列之Window环境部署配置
- Sikuli automatic testing technology based on pattern recognition
- vue中缓存页面 keepAlive使用
- R language dplyr package bind_ The rows function merges the rows of the two dataframes vertically. The final number of rows is the sum of the rows of the original two dataframes (combine data frames)
- 2022北京石景山区专精特新中小企业申报流程,补贴10-20万
- 【小程序实战系列】小程序框架 页面注册 生命周期 介绍
- Vsomeip3 dual computer communication file configuration
- 杜老师说网站更新图解
猜你喜欢

评价——TOPSIS

功能:crypto-js加密解密

【TcaplusDB知识库】TcaplusDB系统用户组介绍
[tcapulusdb knowledge base] tcapulusdb doc acceptance - Introduction to creating game area
【ceph】cephfs caps简介
Mr. Du said that the website was updated with illustrations

Restcloud ETL resolves shell script parameterization
![[tcapulusdb knowledge base] Introduction to tcapulusdb system management](/img/5a/28aaf8b115cbf4798cf0b201e4c068.png)
[tcapulusdb knowledge base] Introduction to tcapulusdb system management

【文件】VFS四大struct:file、dentry、inode、super_block 是什么?区别?关系?--编辑中
![[tcapulusdb knowledge base] tcapulusdb doc acceptance - table creation approval introduction](/img/66/f3ab0514d691967ad88535ae1448c1.png)
[tcapulusdb knowledge base] tcapulusdb doc acceptance - table creation approval introduction

随机推荐
Program analysis and Optimization - 8 register allocation
R language GLM function logistic regression model, using epidisplay package logistic The display function obtains the summary statistical information of the model (initial and adjusted odds ratio and
功能:crypto-js加密解密
Document 1
Analysis of ble packet capturing debugging information
[async/await] - the final solution of asynchronous programming
Summer camp is coming!!! Chongchongchong
TS common data types summary
RestCloud ETL抽取动态库表数据实践
【C语言练习——打印空心上三角及其变形】
数据库-视图
【TcaplusDB知识库】TcaplusDB OMS业务人员权限介绍
R language uses ggplot2 to visualize the results of Poisson regression model and count results under different parameter combinations
北京房山区专精特新小巨人企业认定条件,补贴50万
Compile configuration in file
[tcapulusdb knowledge base] tcapulusdb doc acceptance - transaction execution introduction
安全Json协议
Principle of TCP reset attack
SAP GUI 770 Download
杜老师说网站更新图解