当前位置:网站首页>Performance analysis of continuous time systems (2) - second order system performance improvement methods PID, PR
Performance analysis of continuous time systems (2) - second order system performance improvement methods PID, PR
2022-07-27 19:04:00 【Miracle Fan】
Self control principle learning notes
Self control principle learning notes column
List of articles
4. Second order system performance improvement
4.1 P-Proportion

4.1.1 Open loop transfer function :
L ( s ) = K p w n 2 s ( s + 2 ζ w n ) L(s)=\frac{K_pw_n^2}{s(s+2\zeta w_n)} L(s)=s(s+2ζwn)Kpwn2
4.1.2 Closed loop transfer function of the system :
Φ ( s ) = Y ( s ) R ( s ) = K p w n 2 s 2 + 2 ζ w n s + K p w n 2 = w n p 2 s 2 + 2 ζ p w n p s + w n p 2 \Phi(s)=\frac{Y(s)}{R(s)}=\frac{K_pw_n^2}{s^2+2\zeta w_ns+K_pw_n^2}=\frac{w_{np}^2}{s^2+2\zeta_pw_{np}s+w_{np}^2} Φ(s)=R(s)Y(s)=s2+2ζwns+Kpwn2Kpwn2=s2+2ζpwnps+wnp2wnp2
4.1.3 Compare typical links
The real part of the characteristic root remains unchanged
Closed loop gain Φ ( s ) ∣ s = 0 = 1 \Phi(s)|_{s=0}=1 Φ(s)∣s=0=1 Don't change ; Open loop speed gain K = s 1 L ( s ) ∣ s = 0 = K p w n 2 ζ K=s^1L(s)|_{s=0}=\frac{K_pw_n}{2\zeta} K=s1L(s)∣s=0=2ζKpwn
Natural frequency w n p = K p w n w_{np}=\sqrt{K_p}w_n wnp=Kpwn
Damping coefficient ζ p = ζ / K p \zeta_p=\zeta/\sqrt{K_p} ζp=ζ/Kp
The adjustment time is basically unchanged
4.2 PD-Proportion Derivate

4.2.1 Open loop transfer function
L ( s ) = ( T d s + 1 ) w n 2 s ( s + 2 ζ w n ) L(s)=\frac{(T_ds+1) w_{n}^{2}}{ s\left(s+2\zeta w_{n}\right)} L(s)=s(s+2ζwn)(Tds+1)wn2
4.2.2 Closed loop transfer function
Φ ( s ) = Y ( s ) R ( s ) = w n 2 ( T d s + 1 ) s 2 + 2 ζ w n s + w n 2 T d s + w n 2 = w n 2 ( T d s + 1 ) s 2 + 2 ζ d w n s + w n 2 \Phi(s)=\frac{Y(s)}{R(s)}=\frac{w_n^2(T_ds+1)}{s^2+2\zeta w_ns+w_n^2T_ds+w_n^2}=\frac{w_{n}^2(T_ds+1)}{s^2+2\zeta_dw_{n}s+w_{n}^2} Φ(s)=R(s)Y(s)=s2+2ζwns+wn2Tds+wn2wn2(Tds+1)=s2+2ζdwns+wn2wn2(Tds+1)
4.2.3 Compare typical links
The closed-loop gain is 1, The open-loop gain is K = w n 2 ζ K=\frac{w_n}{2\zeta} K=2ζwn
Natural frequencies do not change , The damping coefficient increases , Overshoot becomes smaller —— ζ d = ζ + T d w n 2 \zeta_d=\zeta+\frac{T_dw_n}{2} ζd=ζ+2Tdwn
The step response of the system is equivalent to adding an impulse response , The range is T d T_d Td times , Speed up the dynamic response of the system
Y ( s ) = w n 2 s 2 + 2 ζ d w n s + w n 2 ∗ 1 s + w n 2 ⋅ T d s 2 + 2 ζ d w n s + w n 2 Y(s)=\frac{w_{n}^2}{s^2+2\zeta_dw_{n}s+w_{n}^2}*\frac{1}{s}+\frac{w_{n}^2 \cdot T_d}{s^2+2\zeta_dw_{n}s+w_{n}^2} Y(s)=s2+2ζdwns+wn2wn2∗s1+s2+2ζdwns+wn2wn2⋅Td
4.2.4 Qualitative conclusion
- Increase the system resistance ratio , It does not affect the natural frequency of the system , So as to suppress the oscillation , Reduce overshoot , Improve system stability .
- Zero appears , Speed up the response of the system
- Differential has amplification effect on high-frequency noise , When the input noise is high , Do not use
4.3 PI-Proportion Integral

4.3.1 Open loop transfer function
L ( s ) = ( T i s + 1 ) w n 2 T i s 2 ( s + 2 ζ w n ) L(s)=\frac{(T_is+1) w_{n}^{2}}{T_{i} s^{2}\left(s+2\zeta w_{n}\right)} L(s)=Tis2(s+2ζwn)(Tis+1)wn2
4.3.2 Closed loop transfer function
Y ( s ) R ( s ) = ω n 2 ( T i s + 1 ) T i s 3 + 2 T i ζ ω n s 2 + T i ω n 2 s + ω n 2 Y ( s ) D ( s ) = ω n 2 T i s T i s 3 + 2 T i ζ ω n s 2 + T i ω n 2 s + ω n 2 \frac{Y(s)}{R(s)}=\frac{\omega_{\mathrm{n}}^{2}\left(T_{\mathrm{i}} s+1\right)}{T_{\mathrm{i}} s^{3}+2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}} s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}{ }^{2} s+\omega_{\mathrm{n}}^{2}}\\ \frac{Y(s)}{D(s)}=\frac{\omega_{\mathrm{n}}^{2} T_{\mathrm{i}} s}{T_{\mathrm{i}} s^{3}+2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}} s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}{ }^{2} s+\omega_{\mathrm{n}}^{2}} R(s)Y(s)=Tis3+2Tiζωns2+Tiωn2s+ωn2ωn2(Tis+1)D(s)Y(s)=Tis3+2Tiζωns2+Tiωn2s+ωn2ωn2Tis
4.3.3 Compare typical links
- Given the closed-loop position gain to the output is 1
- The open-loop acceleration gain is K = s 2 L ( s ) ∣ s = 0 = w n 2 ζ T i K=s^2L(s)|_{s=0}=\frac{w_n}{2\zeta T_i} K=s2L(s)∣s=0=2ζTiwn
- The static gain of disturbance to output transfer function is 0
- The order of the system is determined by 1 Step becomes 2 rank
4.3.4 Qualitative conclusion
- The order of the system rises , Improper selection of parameters may cause RHP pole
- Introduce the integral link , Eliminate the error caused by constant value disturbance
- The integration link reduces the response speed , The overshoot may be increased at the initial stage of response
4.4 PID-Proportion Integral Derivate
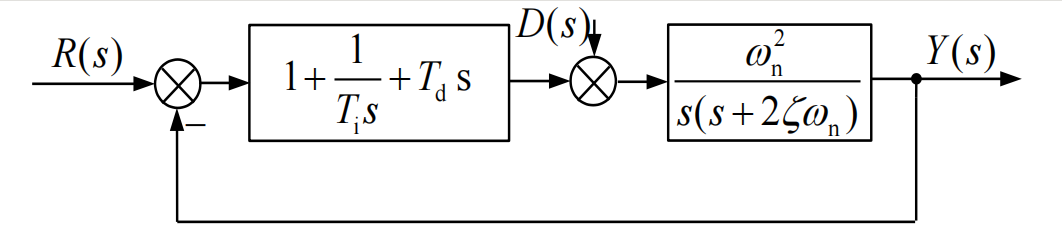
4.4.1 Open loop transfer function
L ( s ) = ( T i T d s 2 + T i s 1 ) w n 2 T i s 2 ( s + 2 ζ w n ) L(s)=\frac{(T_iT_ds^2+T_is1) w_{n}^{2}}{T_{i} s^{2}\left(s+2\zeta w_{n}\right)} L(s)=Tis2(s+2ζwn)(TiTds2+Tis1)wn2
4.4.2 Closed loop transfer function
Y ( s ) R ( s ) = T d T i ω n 2 s 2 + T i ω n 2 s + ω n 2 T i s 3 + ( 2 T i ζ ω n + T d T i ω n 2 ) s 2 + T i ω n 2 s + ω n 2 Y ( s ) D ( s ) = ω n 2 T i s T i s 3 + ( 2 T i ζ ω n + T d T i ω n 2 ) s 2 + T i ω n 2 s + ω n 2 \frac{Y(s)}{R(s)}=\frac{T_{\mathrm{d}} T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s+\omega_{\mathrm{n}}^{2}}{T_{\mathrm{i}} s^{3}+\left(2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}}+T_{\mathrm{d}} T_{\mathrm{i}} \omega_{\mathrm{n}}^{2}\right) s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s+\omega_{\mathrm{n}}^{2}}\\ \frac{Y(s)}{D(s)}=\frac{\omega_{\mathrm{n}}^{2} T_{\mathrm{i}} s}{T_{\mathrm{i}} s^{3}+\left(2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}}+T_{\mathrm{d}} T_{\mathrm{i}} \omega_{\mathrm{n}}^{2}\right) s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s+\omega_{\mathrm{n}}^{2}} R(s)Y(s)=Tis3+(2Tiζωn+TdTiωn2)s2+Tiωn2s+ωn2TdTiωn2s2+Tiωn2s+ωn2D(s)Y(s)=Tis3+(2Tiζωn+TdTiωn2)s2+Tiωn2s+ωn2ωn2Tis
4.4.3 Compare typical links
- Given the closed-loop position gain to the output is 1
- The open-loop acceleration gain is K = s 2 L ( s ) ∣ s = 0 = w n 2 ζ T i K=s^2L(s)|_{s=0}=\frac{w_n}{2\zeta T_i} K=s2L(s)∣s=0=2ζTiwn
- The static gain of disturbance to output transfer function is 0
- The order of the system is determined by 1 Step becomes 2 rank
4.4.4 Qualitative conclusion
- P—— Improve response speed ;I—— Eliminate steady-state errors ;D—— Appropriately speed up the transient response , Suppress overshoot
- Eliminate the error caused by constant value disturbance .
4.5 Differential feedback

4.5.1 Open loop transfer function :
L ( s ) = ω n 2 s ( 2 ζ ω n + k ω n 2 ) L(s)=\frac{\omega_{\mathrm{n}}^{2}}{s\left(2 \zeta \omega_{\mathrm{n}}+k \omega_{\mathrm{n}}{ }^{2}\right) } L(s)=s(2ζωn+kωn2)ωn2
4.5.2 Closed loop transfer function :
Y ( s ) R ( s ) = ω n 2 s 2 + ( 2 ζ ω n + k ω n 2 ) s + ω n 2 \frac{Y(s)}{R(s)}=\frac{\omega_{\mathrm{n}}^{2}}{s^{2}+\left(2 \zeta \omega_{\mathrm{n}}+k \omega_{\mathrm{n}}{ }^{2}\right) s+\omega_{\mathrm{n}}^{2}} R(s)Y(s)=s2+(2ζωn+kωn2)s+ωn2ωn2
4.5.3 Compare typical links
- The closed-loop position gain is 1
- The open-loop speed gain is reduced to K = w n 2 2 ζ w n + k w n 2 K=\frac{w_n^2}{2\zeta w_n+kw_n^2} K=2ζwn+kwn2wn2
- The natural frequency remains unchanged
- The damping coefficient increases ζ d f = ζ + 1 2 k w n \zeta_{df}=\zeta+\frac{1}{2}kw_n ζdf=ζ+21kwn
4.4.5 Qualitative conclusion
- Does not affect natural frequency , Increase the damping ratio of the system , Reduce overshoot
- Reduce the open-loop gain , Increase the steady-state error of system slope input
- No closed-loop zero , The output stability is better than PD Adjust the
边栏推荐
- Ridis command notes
- Unity学习笔记(实现传送带)
- 电磁场学习笔记-矢量分析和场论基础
- Docker - docker installation, MySQL installation on docker, and project deployment on docker
- Jianmu continuous integration platform v2.5.2 release
- npm的身份证和依赖
- Music rhythm colorful gradient lamp chip -- dlt8s04a- Jericho
- 正则表达式的扩展
- Valueerror: found input variables with inconsistent numbers of samples: [80019456, 26673152] [error reporting]
- Interceptor拦截器
猜你喜欢

Idea 2020.1 Community Edition download experience

During the interface test, connect to the database and back up, restore and verify the data source

MySQL 05 stored procedure

百度地图技术概述,及基本API与WebApi的应用开发

【微信小程序】项目实战—抽签应用

微信支付及支付回调

JDBC-MySql 02 数据访问和DAO模式
Unity-显示Kinect深度数据

Matplotlib (basic usage)

I'm stupid. When completable future is used with openfegin, it even reports an error
随机推荐
进行接口测试时,连接数据库,对数据源进行备份、还原、验证操作
Wechat payment and payment callback
Filebeat.yml configuration file about the configuration of multiple services
express
Product recommendation and classified product recommendation
LeetCode 刷题 第一天
Nodejs 模板引擎ejs
Extension of ES6 value
SSM integration
Hash、Set、List、Zset、BitMap、Scan
Typeerror: conv2d(): argument 'padding' (position 5) must be multiple of ints, not STR [error]
Redis annotation
MicaZ+Tinyos学习笔记(1)
Join query and subquery
订单的提交
MySQL 06 transaction, view, index, backup and recovery
JDBC-MySql 01 JDBC操作MySql(增删改查)
Imitation thread deduction
C#与Mysql数据库交互-Mysql配置及增删查改操作
JDBC MySQL 02 data access and Dao mode