当前位置:网站首页>基于ORB-SLAM2的改进代码
基于ORB-SLAM2的改进代码
2022-08-01 16:58:00 【FAM-VIVE】
搬运自《计算机视觉life》
1. 点线特征相关
添加了线特征。从3D密集SLAM进行表面重建的增量3D线段提取。
Add line feature based ORB-SLAM2
RGB-D模式下添加了点线融合
RGBD-SLAM with Point and Line Features, developed based on ORB_SLAM2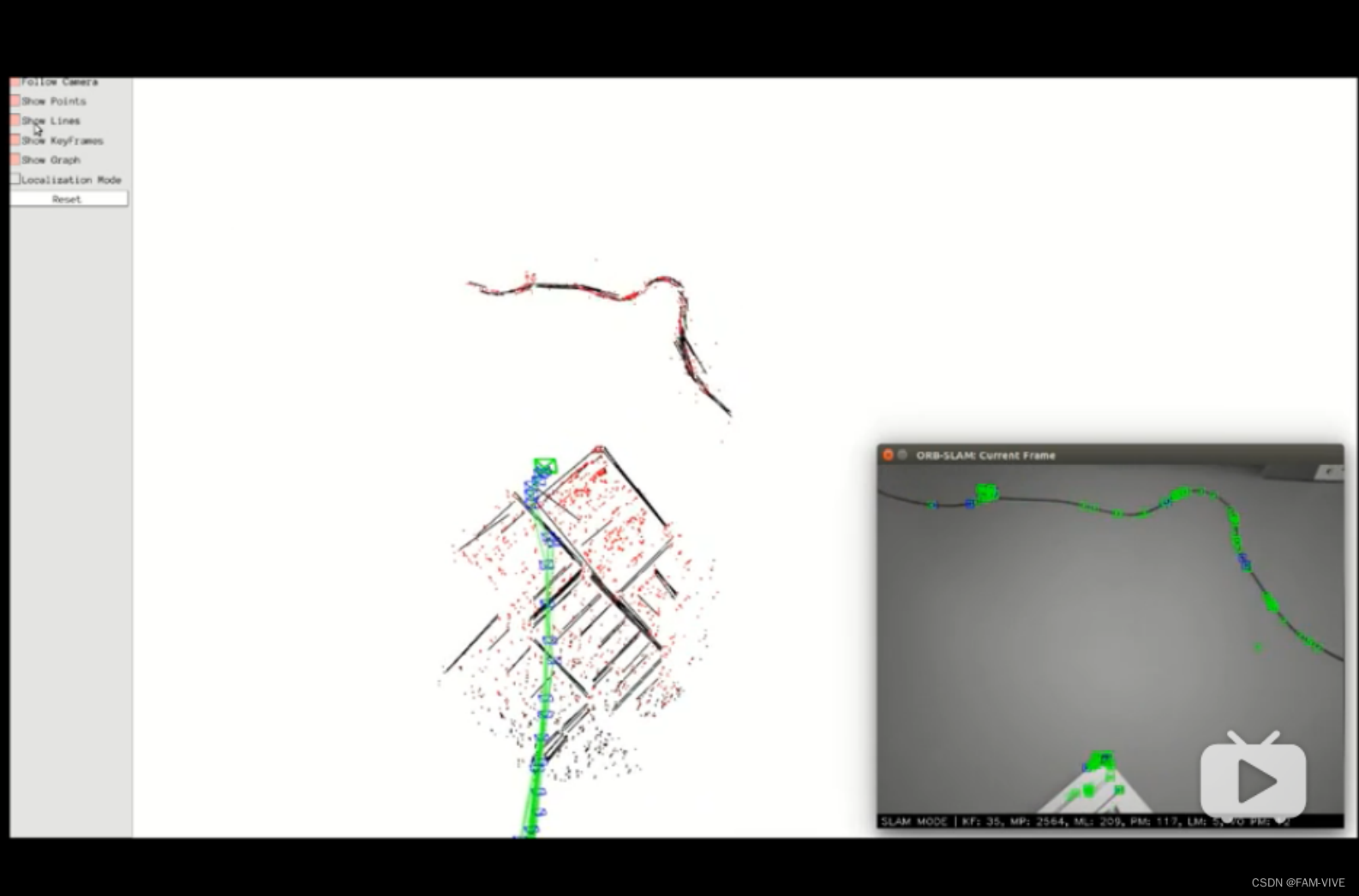
ORB-SLAM2_with_line, Monocular ORB-SLAM with Line Features
双目点线融合,在弱纹理环境中传统点特征方法失效的情况下拥有较高的运行鲁棒性。
PL-SLAM: a Stereo SLAM System through the Combination of Points and Line Segments
2. 用新的特征点替代ORB
使用了一种更好的特征选择方法
GF-ORB-SLAM2, Real-Time SLAM for Monocular, Stereo and RGB-D Cameras, with Loop Detection and Relocalization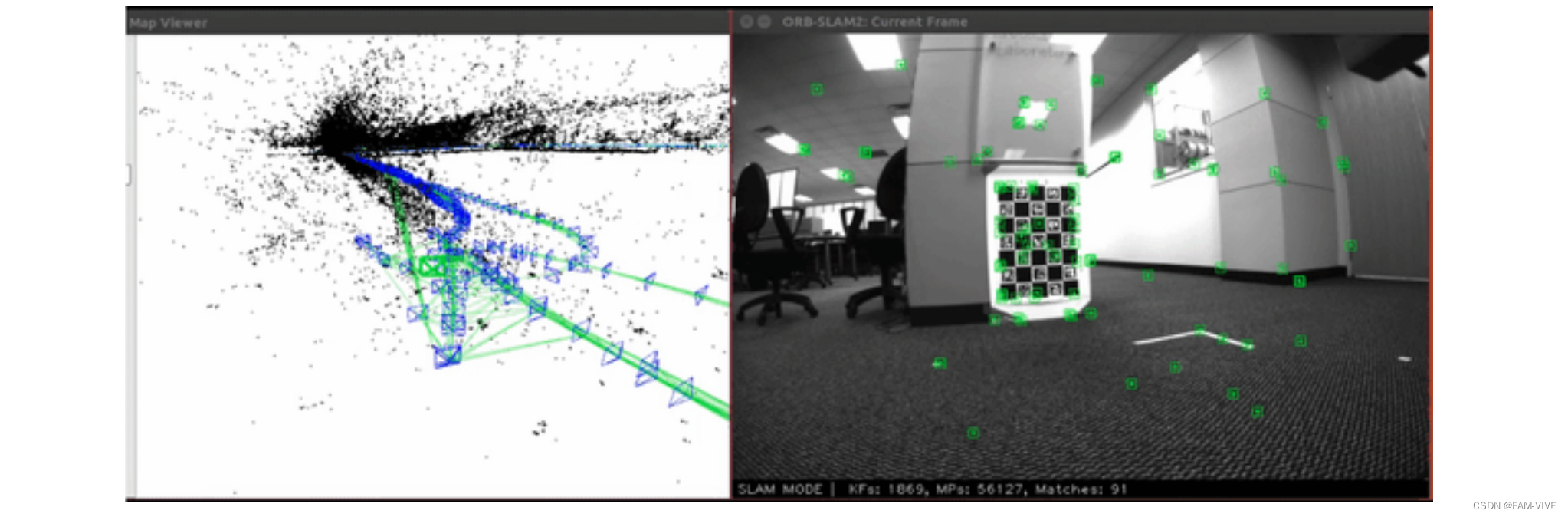
用SuperPoint 替代ORB来进行特征提取
SuperPoint-SLAM
设计的GCNv2具有与ORB功能相同的描述符格式,可以替代关键点提取,精度更高,适合在嵌入式低功耗平台上运行
GCNv2: Efficient Correspondence Prediction for Real-Time SLAM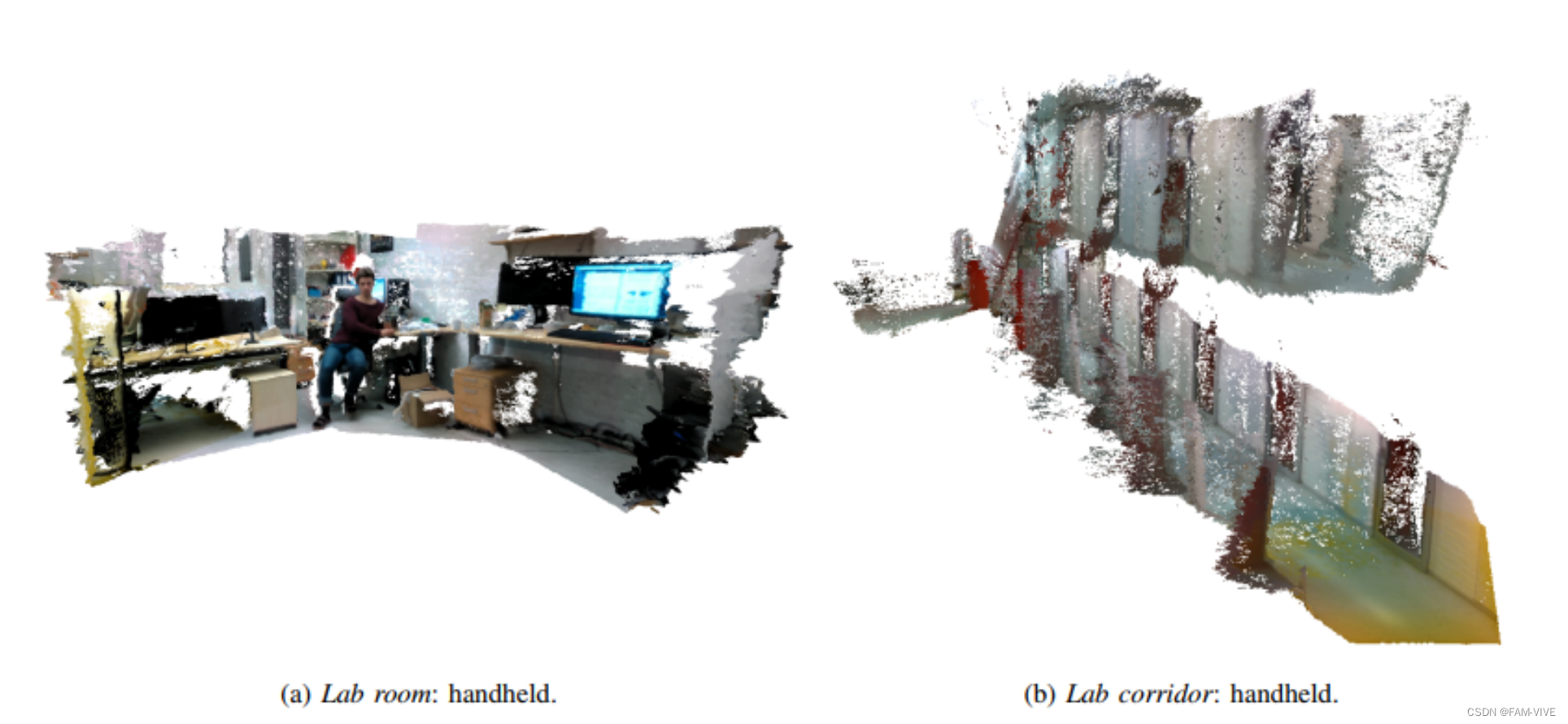
3. 直接法替代特征点法
使用SVO中直接法来跟踪代替耗时的特征点提取匹配,在保持同样精度的情况下,是原始ORB-SLAM2速度的3倍。
ORB-YGZ-SLAM, average 3x speed up and keep almost same accuracy v.s. ORB-SLAM2, use direct tracking in SVO to accelerate the feature matching
4. 融合其它传感器
双目VIO版本,加入了LK光流和滑动窗口BA优化
YGZ-stereo-inertial SLAM, LK optical flow + sliding window bundle adjustment
京胖实现的VI-ORB-SLAM2
VIORB, An implementation of Visual Inertial ORBSLAM based on ORB-SLAM2
支持鱼眼,不需要rectify和裁剪输入图
Fisheye-ORB-SLAM, A real-time robust monocular visual SLAM system based on ORB-SLAM for fisheye cameras, without rectifying or cropping the input images
5. 地图相关
添加保存和导入地图功能
Osmap, Save and load orb-slam2 maps
ORB_SLAM2 with map load/save function
添加了地图可视化
Viewer for maps from ORB-SLAM2 Osmap
高翔实现的添加稠密点云地图
ORBSLAM2_with_pointcloud_map
在高翔基础上添加了稠密闭环地图
ORB-SLAM2_RGBD_DENSE_MAP, modified from Xiang Gao’s “ORB_SLAM2_modified”. It is added a dense loopclosing map model
6. 动态环境
适合动态环境,增加了动态物体检测和背景修复的能力
DynaSLAM, is a SLAM system robust in dynamic environments for monocular, stereo and RGB-D setups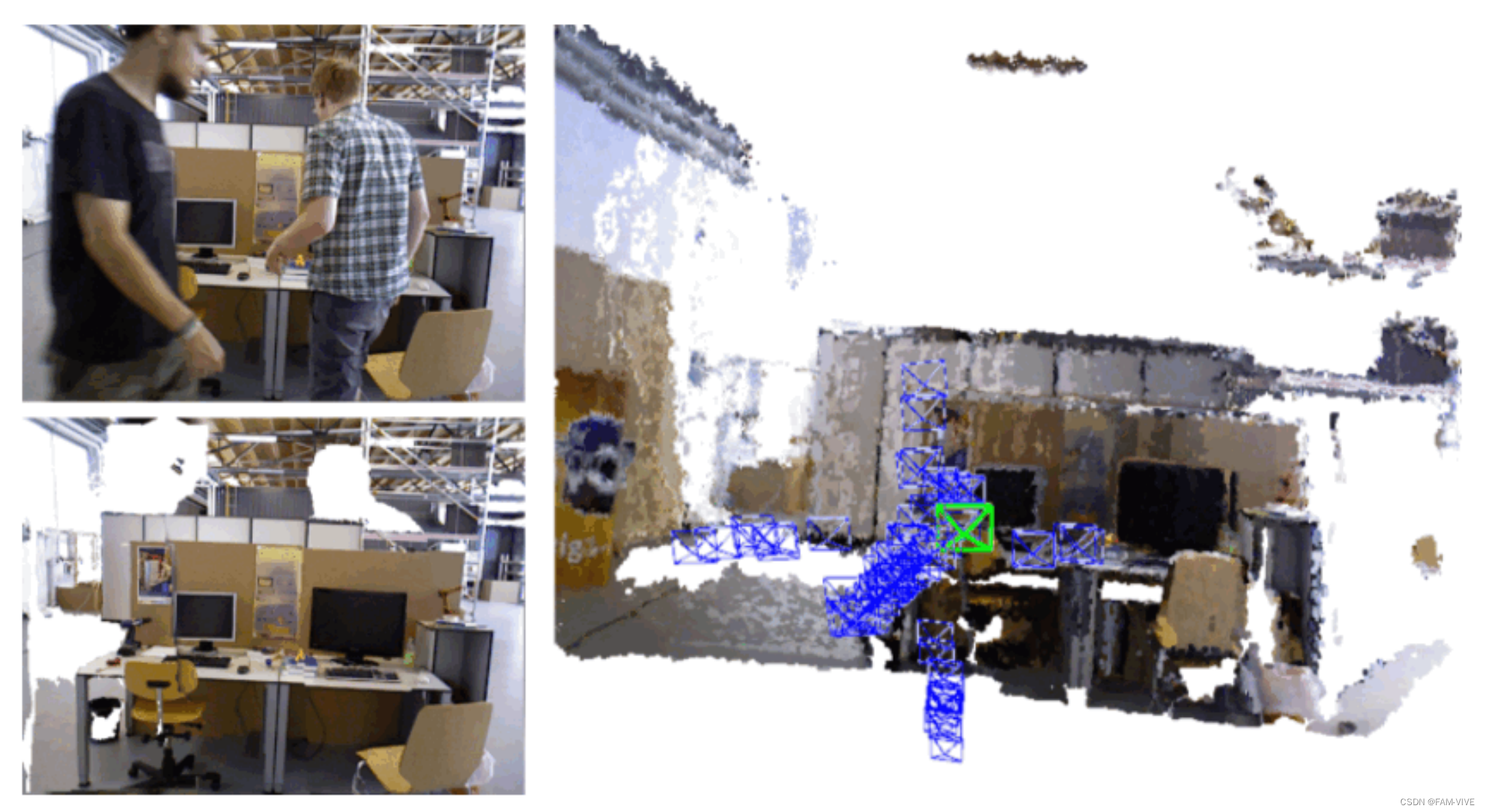
用YOLO来做动态环境的检测
YOLO Dynamic ORB_SLAM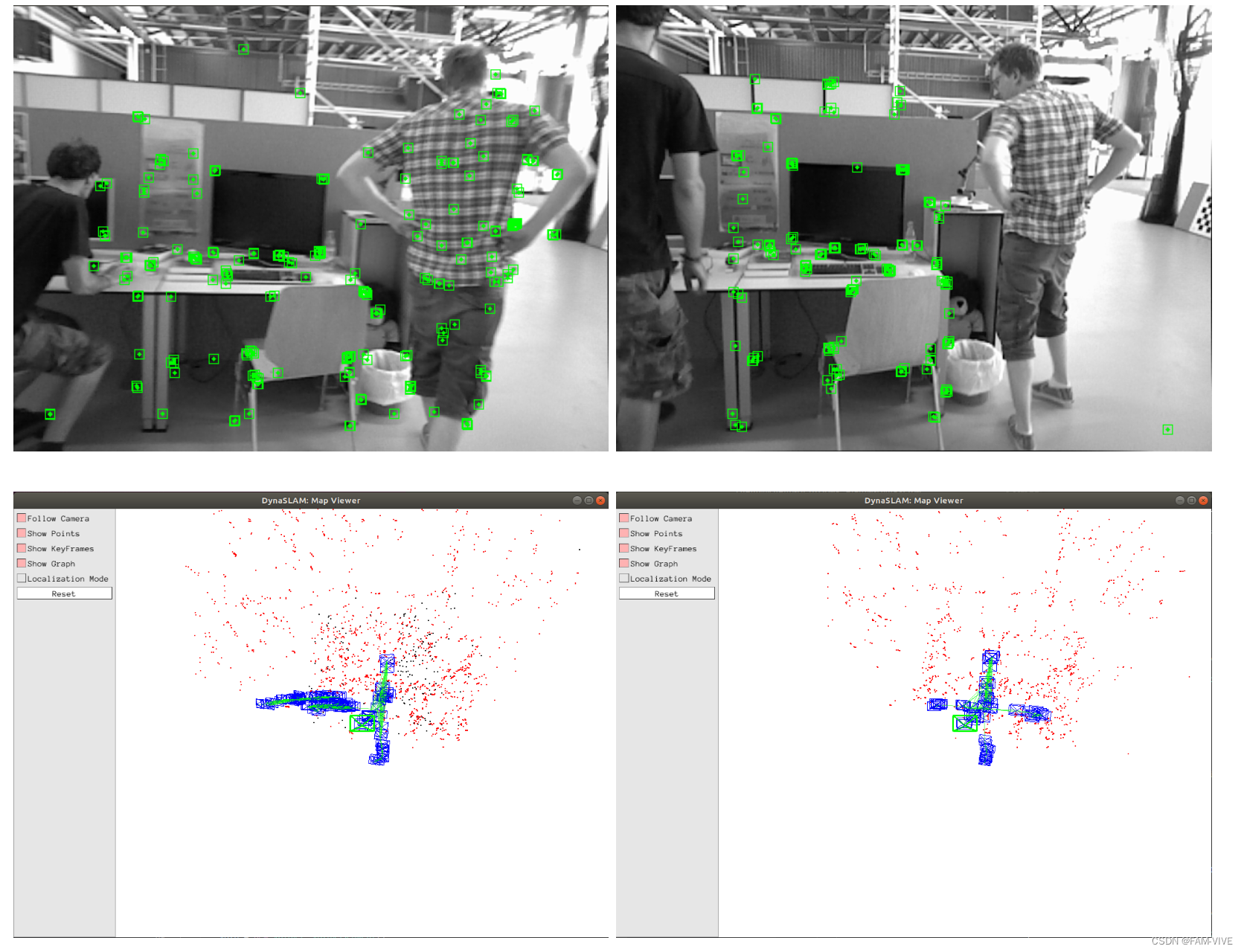
7. 语义相关
动态语义SLAM 目标检测+VSLAM+光流/多视角几何动态物体检测+octomap地图+目标数据库
ORB_SLAM2_SSD_Semantic, 动态语义SLAM 目标检测+VSLAM+光流/多视角几何动态物体检测+octomap地图+目标数据库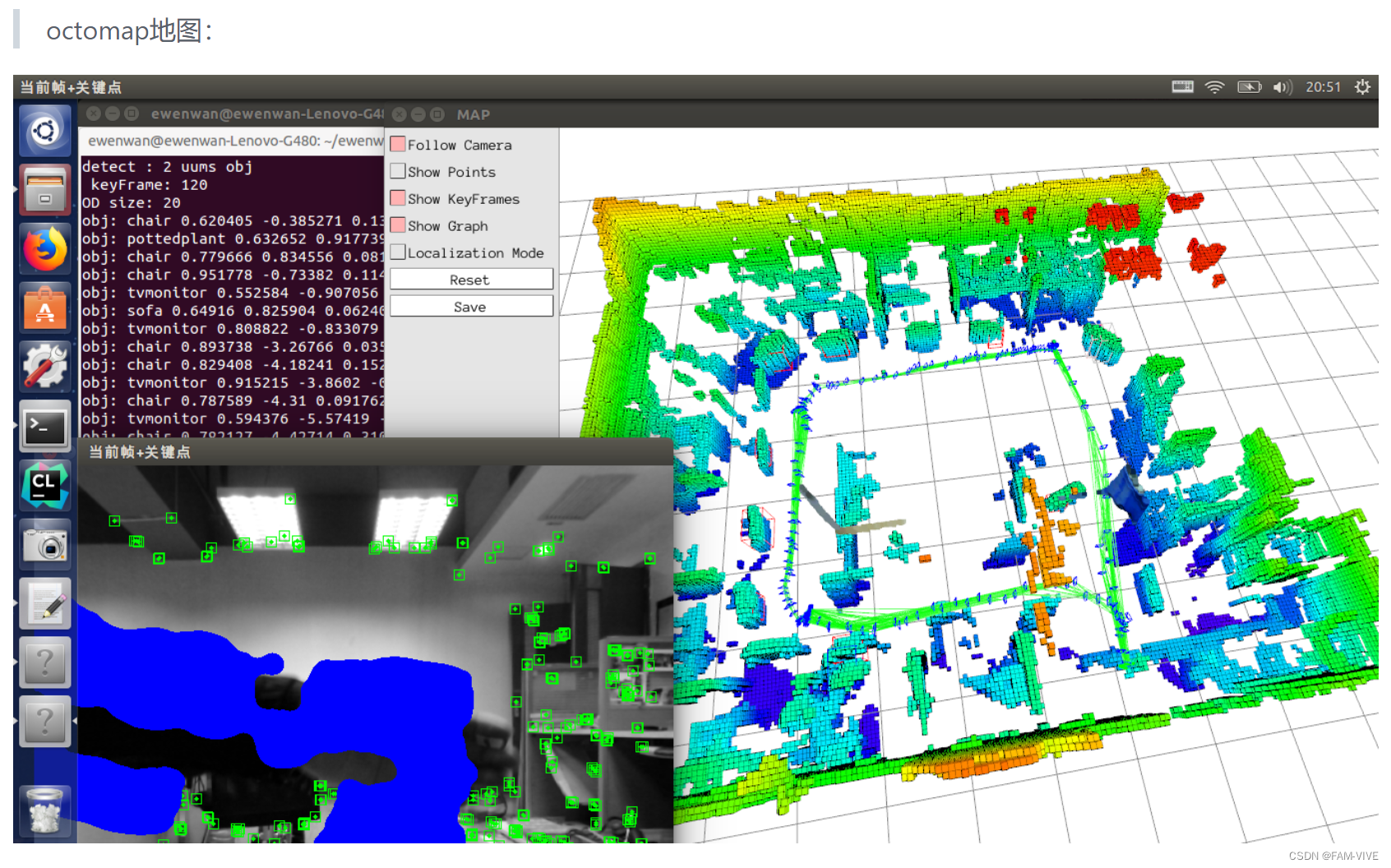
用YOLO v3的语义信息来增加跟踪性能
TE-ORB_SLAM2, Tracking Enhanced ORB-SLAM2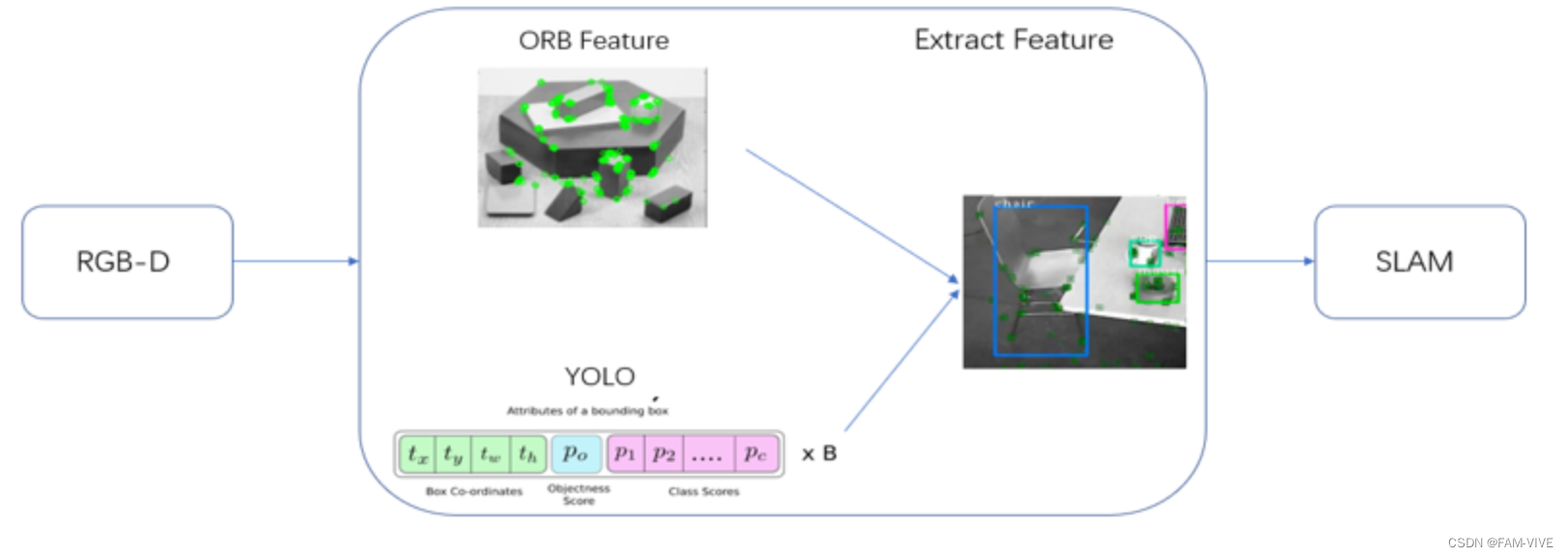
通过手持RGB-D相机进行SLAM,ORB-SLAM2作为后端,用PSPNet做语义预测并将语义融入octomap
Semantic SLAM,Real time semantic slam in ROS with a hand held RGB-D camera
orb-slam2 with semantic labelling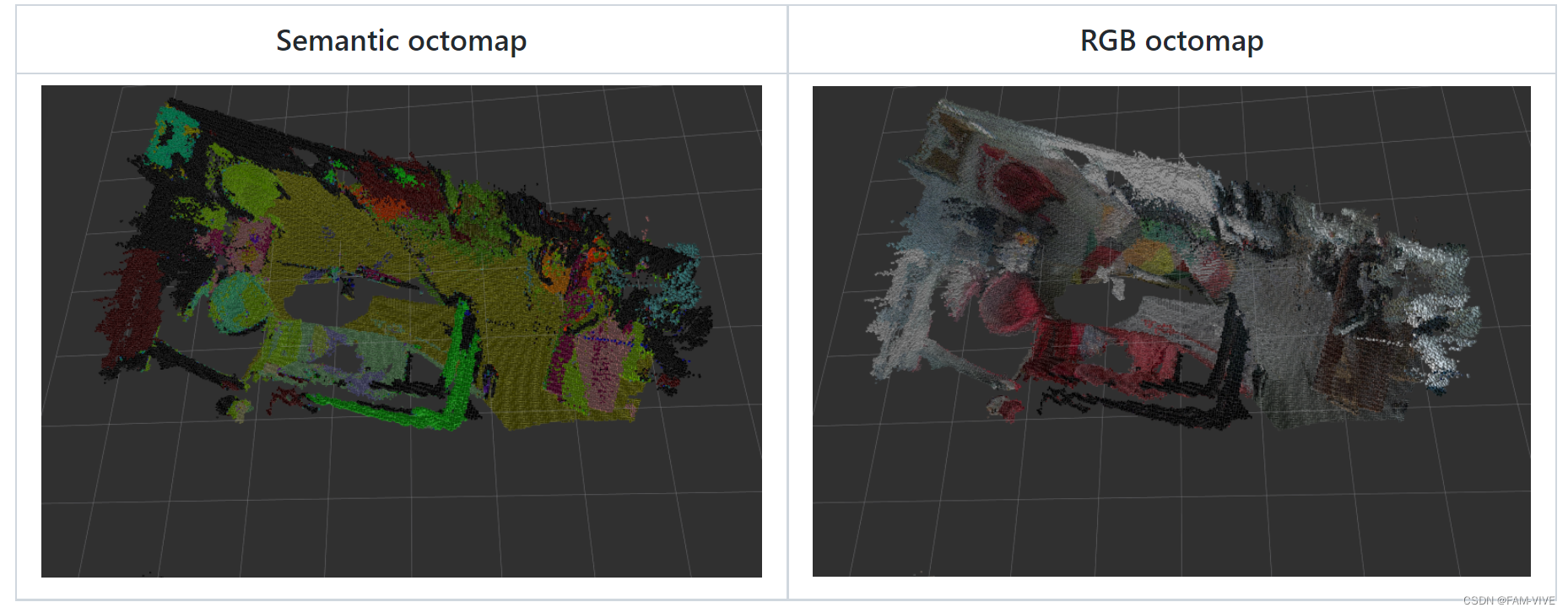
用深度学习的场景理解来增强传统特征检测方法,基于贝叶斯SegNet 和ORB-SLAM2,用于长时间定位。
SIVO: Semantically Informed Visual Odometry and Mapping
冲!
边栏推荐
猜你喜欢





随机推荐
SQL函数 TO_CHAR(一)
晶振工作原理详解
插入排序 优化插入排序
缓存一致性MESI与内存屏障
05 Doris cluster construction
04 flink 集群搭建
【Unity,C#】哨兵射线触发器模板代码
个人日记
C # Excel helper classes
沈腾拯救暑期档
今晚直播!
程序员架构修炼之道:如何设计“易理解”的系统架构?
第一次改开源中间件keycloak总个结
Description of common operations and help projects about DevExpress in C#
比对软件-blastN结果详解
The untiy Resources directory dynamically loads resources
06 redis cluster structures
金仓数据库 KDTS 迁移工具使用指南(3. 系统部署)
[ACNOI2022]物品
网上开户佣金万一靠谱吗,网上开户安全吗