当前位置:网站首页>[AUTOSAR VI description document]
[AUTOSAR VI description document]
2022-07-03 00:50:00 【Ke Yuqian】
AutoSAR 6、 ... and Description file
1 Main flow diagram
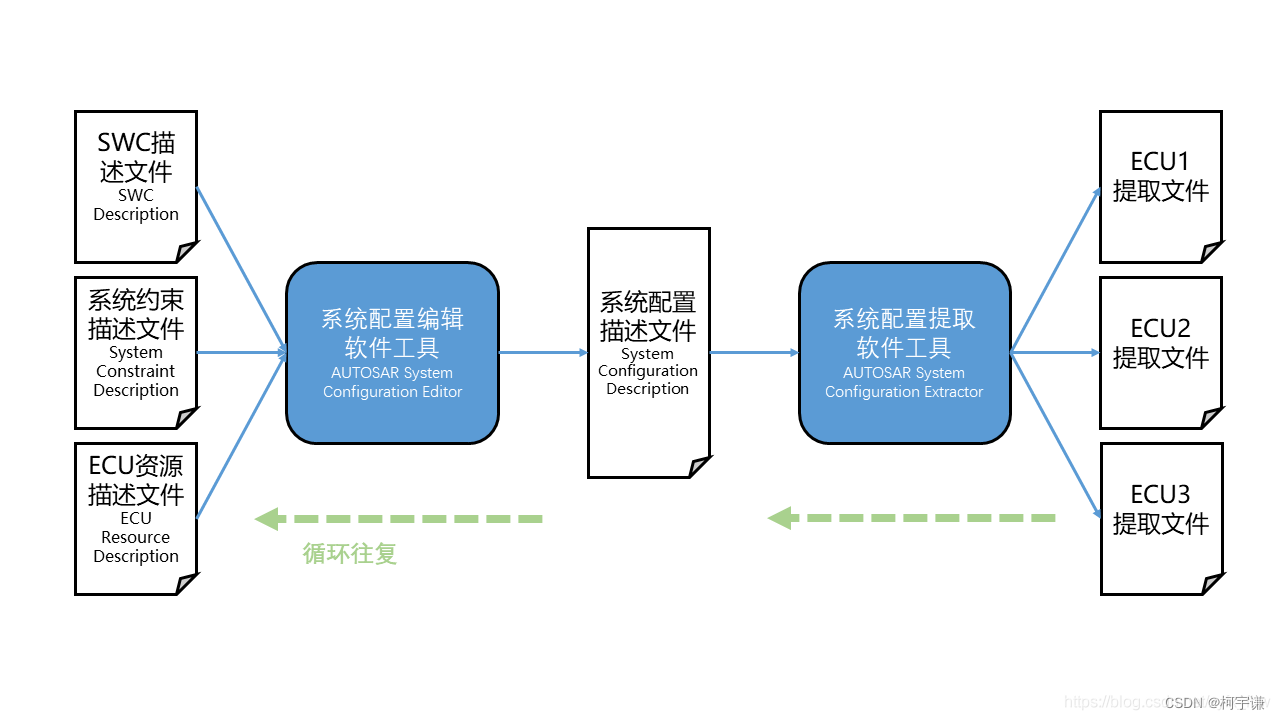
The process here is still the three steps mentioned before :( Mainly by OEM To do it )
• The first is to list needs and resources , Here we use three kinds of documents to describe these requirements and resources :SWC Description file 、 System constraint description file 、ECU Resource description file
• Then import these three files into the system configuration editing tool , Generate system configuration description file . This description file is the description file of the whole vehicle
• Finally, import the system configuration description file into the system configuration extraction tool , Export each ECU Corresponding extraction file . This file contains each ECU Information that will be needed , Such as communication matrix 、SWC Etc
2 SWC Description file
The first thing to note is ,SWC The description file may have multiple files . It mainly contains the following information :
1. Every SWC Of Data and Operations
2. Resources required by each software component ( Like storage 、CPU Time and others )
3. SWC The interface of (Repetition rate)
4. Operating mechanism
3 System constraint description file
This file mainly contains the following information :
1. Network topology
2. Communication matrix
3. Bus baud rate , Time to wait
4. agreement
4 ECU Resource description file
This is simply what ECU What specific functions can be realized , What resources are available .
Thus, the system designer can pass the document , Integrate different functions SWC Assign to the corresponding ECU in .
There is mainly the following information :
1. sensor 、 actuator
2. Memory
3. processor
4. Communication peripherals ( Such as external transceiver )
5. Pin assignments
5 System configuration description file
Yes SWC Description file System constraint description file ECU Resource description file A summary of Including all the above information of the whole vehicle
6 ECU Extract files — ECUEX file
The information of the system configuration description file is assigned to a single ECU, To make a single ECU Get the information they need , Unwanted information is filtered out .
It mainly includes the following contents ( It can also include only part of it ):
• Communication matrix : such as CAN Information contained in the bus , image CAN ID Number 、signals、 Extended frame or ordinary frame and baud rate
• SWCs、Ports etc. : SWC And internal runnable Can be in ECUEX The document gives ; It also includes Ports; also SWC The connection between (Connecters),
To put it bluntly, it is the first chapter AppL The contents in can basically include
• Data mapping (Data Mapping): The signal of the bus (Network Signals) Mapping to SWCs in , The data mapping here will be explained in the practice chapter
- ECU Through this information, you can build your own software ( Of course, we need RTE The configuration file 、BSW Configuration files of each module 、MCAL Configuration file and source code )
- ECUEX file ( The full name is ECU Extract of System Description)
6.1 ECUEX Content coverage level
1、 Grade 1: The current general state
This grade OEM Mainly only do communication matrix , But no longer use .dbc Such documents , But use .arxml 了 . The following table lists OEM and TIER1 Division of labor :
| name | explain | OEM | TIER1 |
|---|---|---|---|
| Service Components | by SWCs Provide practical BSW Service Interface ( Need to be in BSW Configured in ) | Not responsible for | be responsible for |
| Service Mapping | Connect SWCs and Service Components | Not responsible for | be responsible for |
| Atomics | The concrete realization of the function | Not responsible for | be responsible for |
| Compositions | Every SWC What is needed on Port、 Connectors and so on | Not responsible for | be responsible for |
| Data Mapping | Connect Network Signals To SWCs in | Not responsible for | be responsible for |
| ECU Composition | Just what you need SWC | Not responsible for | be responsible for |
| Communication | It is the communication matrix mentioned above | be responsible for | Not responsible for |
2、 Grade 2: Advanced state
OEM More work has been done , The advantage is that it can make the whole vehicle design more coordinated , Easier to control
| name | explain | OEM | TIER1 |
|---|---|---|---|
| Service Components | by SWCs Provide practical BSW Service Interface ( Need to be in BSW Configured in ) | Not responsible for | be responsible for |
| Service Mapping | Connect SWCs and Service Components | Not responsible for | be responsible for |
| Atomics | The concrete realization of the function | Not responsible for | be responsible for |
| Compositions | Every SWC What is needed on Port、 Connectors and so on | be responsible for | Not responsible for |
| Data Mapping | Connect Network Signals To SWCs in | be responsible for | Not responsible for |
| ECU Composition | Just what you need SWC | be responsible for | Not responsible for |
| Communication | It is the communication matrix mentioned above | be responsible for | Not responsible for |
3、 Grade 3: The ultimate state
In this level ,OEM Even participated in part of the function design and implementation , Pay attention to the responsibilities in the table , This is to say OEM and TIER1 Will be responsible for some
| name | explain | OEM | TIER1 |
|---|---|---|---|
| Service Components | by SWCs Provide practical BSW Service Interface ( Need to be in BSW Configured in ) | Not responsible for | be responsible for |
| Service Mapping | Connect SWCs and Service Components | Not responsible for | be responsible for |
| Atomics | The concrete realization of the function | be responsible for | be responsible for |
| Compositions | Every SWC What is needed on Port、 Connectors and so on | be responsible for | Not responsible for |
| Data Mapping | Connect Network Signals To SWCs in | be responsible for | Not responsible for |
| ECU Composition | Just what you need SWC | be responsible for | Not responsible for |
| Communication | It is the communication matrix mentioned above | be responsible for | Not responsible for |
边栏推荐
猜你喜欢
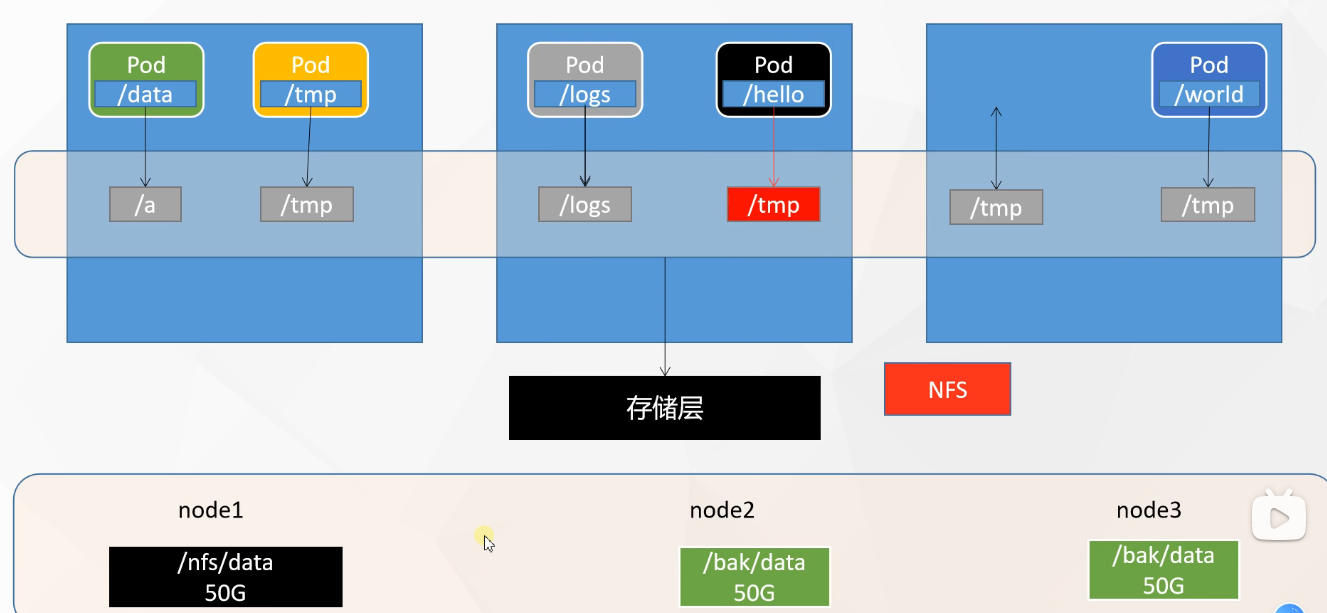
Kubernetes resource object introduction and common commands (V) - (NFS & PV & PVC)
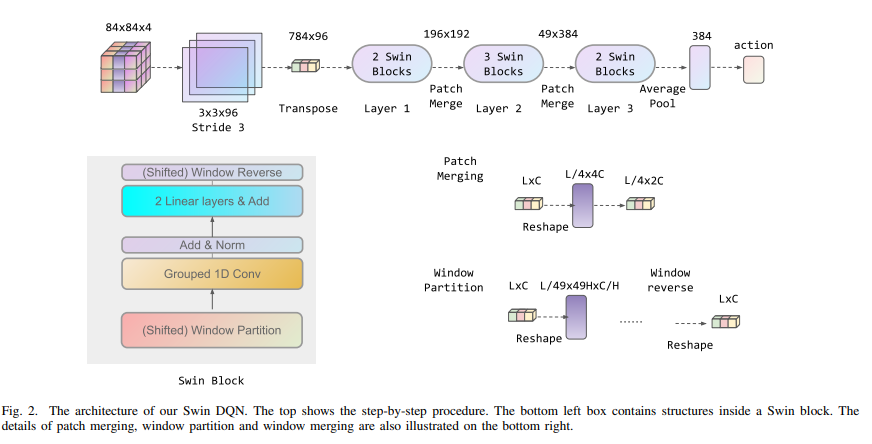
奥斯陆大学:Li Meng | 基于Swin-Transformer的深度强化学习

全志A40i/T3如何通过SPI转CAN
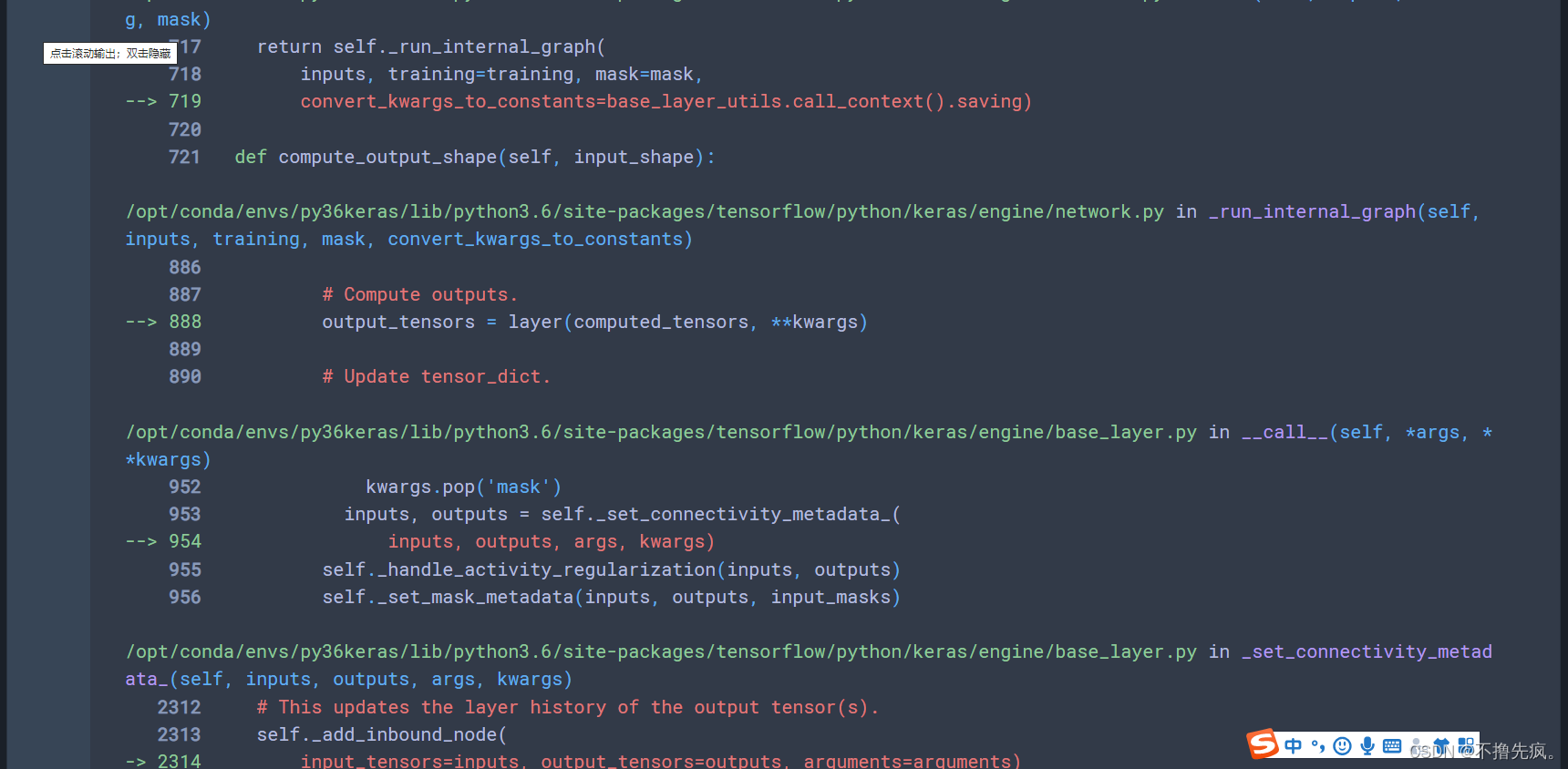
Attributeerror: 'tuple' object has no attribute 'layer' problem solving

Leetcode-2280: represents the minimum number of line segments of a line graph

Automated defect analysis in electron microscopic images-论文阅读笔记
kubernetes资源对象介绍及常用命令(五)-(NFS&PV&PVC)

【AutoSAR 四 BSW概述】
![[AUTOSAR I overview]](/img/e4/b97c6beebf6f431d2d7cf209c6683e.png)
[AUTOSAR I overview]
AEM: Nanlin fan Ben et al. - plant rhizosphere growth promoting bacteria control soybean blight
随机推荐
解决ReactNative使用webView存在缓存问题
Test shift right: Elk practice of online quality monitoring
[shutter] image component (load network pictures | load static pictures | load local pictures | path | provider plug-in)
基于ARM RK3568的红外热成像体温检测系统
AttributeError: ‘tuple‘ object has no attribute ‘layer‘问题解决
The difference between tail -f, tail -f and tail
Automated defect analysis in electron microscopic images-论文阅读笔记
MySQL multi table joint deletion
Shell 实现文件基本操作(sed-编辑、awk-匹配)
Some introduction and precautions about XML
Shell implements basic file operations (cutting, sorting, and de duplication)
Briefly talk about other uses of operation and maintenance monitoring
研发一款国产ARM智能边缘计算网关需要什么
lex && yacc && bison && flex 配置的問題
关于XML一些介绍和注意事项
线程的启动与优先级
[AUTOSAR + IO Architecture]
One of the reasons why setinterval timer does not take effect in ie: the callback is the arrow function
leetcode-2115:从给定原材料中找到所有可以做出的菜
Lu Zhe, chief scientist of Shiping information: building data and personnel centered security capabilities