当前位置:网站首页>OpenPose 运行指令 ([email protected])
OpenPose 运行指令 ([email protected])
2022-08-02 14:14:00 【zhangyu丶】
模型说明(BODY_25、COCO 和 MPI 模型)
BODY_25模型(——model_pose BODY_25)包括身体和脚的关键点,它基于OpenPose,利用部分亲和力字段实时的多人二维姿态估计。
COCO 和 MPI 模型速度较慢,精度较低,且不包含脚部关键点。它们是基于我们以前的论文中使用部分亲和字段实时多人物二维姿态估计。我们强烈建议只使用BODY_25模型。
CPU 模式进行标准识别
Running on Video
# Ubuntu and Mac
./build/examples/openpose/openpose.bin --video examples/media/video.avi
# With face and hands
./build/examples/openpose/openpose.bin --video examples/media/video.avi --face --hand
:: Windows - Portable Demo
bin\OpenPoseDemo.exe --video examples\media\video.avi
:: With face and hands
bin\OpenPoseDemo.exe --video examples\media\video.avi --face --hand
Running on Webcam
# Ubuntu and Mac
./build/examples/openpose/openpose.bin
# With face and hands
./build/examples/openpose/openpose.bin --face --hand
:: Windows - Portable Demo
bin\OpenPoseDemo.exe
:: With face and hands
bin\OpenPoseDemo.exe --face --hand
Running on Images
# Ubuntu and Mac
./build/examples/openpose/openpose.bin --image_dir examples/media/
# With face and hands
./build/examples/openpose/openpose.bin --image_dir examples/media/ --face --hand
:: Windows - Portable Demo
bin\OpenPoseDemo.exe --image_dir examples\media\
:: With face and hands
bin\OpenPoseDemo.exe --image_dir examples\media\ --face --hand
GPU 下的高精度识别
- 以下命令提供了最准确的结果,可实现的身体,手和脸关键点检测。
- 无法在 CPU 模式下工作,因为需要大量内存,对于 CPU 版本,唯一的选择就是手动剪裁人物,以适应 OpenPose 提供的图像的整个区域
- 对于 body-foot (BODY_25) 模型,它还需要 10.5 GB 的GPU内存(对于COCO模型,约6.7 GB)。
- 需要像Titan X, Titan XP,一些 Quadro 模型,P100, V100 等 GPU。
- 包括手和脸将需要 >= 16GB 的 GPU (所以像 Titan X 和 XPs 这样的 12GB GPU 将不再工作)。
- 这些命令在 Titan X 上运行的速度为2帧/秒(对于身体-脚模型为1帧/秒)。
- 递增 --net_resolution 将大大降低帧速率并增加延迟,但可能会提高精度。但是,并不是所有场景都能保证这种精度的提高,需要对每个特定场景进行更详细的分析。例如,它对于身材非常矮小的人的照片效果更好,但是对于占很大比例的人来说效果就不好了。因此,在大多数情况下,无论身材高大还是矮小的人,我们都建议遵循下面的命令以获得最大的准确性。
- 不要将此配置用于 MPII 模型,此多尺度设置可能会损害其准确性。此配置仅对 COCO 和 COCO扩展(例如,默认的BODY_25)模型是最佳的。
Method Overview
# Ubuntu and Mac: Body
./build/examples/openpose/openpose.bin --net_resolution "1312x736" --scale_number 4 --scale_gap 0.25
# Ubuntu and Mac: Body + Hand + Face
./build/examples/openpose/openpose.bin --net_resolution "1312x736" --scale_number 4 --scale_gap 0.25 --hand --hand_scale_number 6 --hand_scale_range 0.4 --face
:: Windows - Portable Demo: Body
bin\OpenPoseDemo.exe --net_resolution "1312x736" --scale_number 4 --scale_gap 0.25
:: Windows - Portable Demo: Body + Hand + Face
bin\OpenPoseDemo.exe --net_resolution "1312x736" --scale_number 4 --scale_gap 0.25 --hand --hand_scale_number 6 --hand_scale_range 0.4 --face
3-D Reconstruction
1 Real-time demo
# Ubuntu and Mac
./build/examples/openpose/openpose.bin --flir_camera --3d --number_people_max 1
# With face and hands
./build/examples/openpose/openpose.bin --flir_camera --3d --number_people_max 1 --face --hand
:: Windows - Portable Demo
bin\OpenPoseDemo.exe --flir_camera --3d --number_people_max 1
:: With face and hands
bin\OpenPoseDemo.exe --flir_camera --3d --number_people_max 1 --face --hand
2 Saving 3-D keypoints and video
# Ubuntu and Mac (same flags for Windows version)
./build/examples/openpose/openpose.bin --flir_camera --3d --number_people_max 1 --write_json output_folder_path/ --write_video_3d output_folder_path/video_3d.avi
3 Fast stereo camera image saving (without keypoint detection) for later post-processing
# Ubuntu and Mac (same flags for Windows version)
# Saving video
# Note: saving in PNG rather than JPG will improve image quality, but slow down FPS (depending on hard disk writing speed and camera number)
./build/examples/openpose/openpose.bin --flir_camera --num_gpu 0 --write_video output_folder_path/video.avi --write_video_fps 5
# Saving images
# Note: saving in PNG rather than JPG will improve image quality, but slow down FPS (depending on hard disk writing speed and camera number)
./build/examples/openpose/openpose.bin --flir_camera --num_gpu 0 --write_images output_folder_path/ --write_images_format jpg
4 Reading and processing previouly saved stereo camera images
# Ubuntu and Mac (same flags for Windows version)
# Optionally add `--face` and/or `--hand` to include face and/or hands
# Assuming 3 cameras
# Note: We highly recommend to reduce `--output_resolution`. E.g., for 3 cameras recording at 1920x1080, the resulting image is (3x1920)x1080, so we recommend e.g. 640x360 (x3 reduction).
# Video
./build/examples/openpose/openpose.bin --video output_folder_path/video.avi --3d_views 3 --3d --number_people_max 1 --output_resolution {
desired_output_resolution}
# Images
./build/examples/openpose/openpose.bin --image_dir output_folder_path/ --3d_views 3 --3d --number_people_max 1 --output_resolution {
desired_output_resolution}
5 Reconstruction when the keypoint is visible in at least x camera views out of the total n cameras
# Ubuntu and Mac (same flags for Windows version)
# Reconstruction when a keypoint is visible in at least 2 camera views (assuming `n` >= 2)
./build/examples/openpose/openpose.bin --flir_camera --3d --number_people_max 1 --3d_min_views 2 --output_resolution {
desired_output_resolution}
# Reconstruction when a keypoint is visible in at least max(2, min(4, n-1)) camera views
./build/examples/openpose/openpose.bin --flir_camera --3d --number_people_max 1 --output_resolution {
desired_output_resolution}
Tracking
1 Runtime huge speed up by reducing the accuracy
# Using OpenPose 1 frame, tracking the following e.g., 5 frames
./build/examples/openpose/openpose.bin --tracking 5 --number_people_max 1
2 Runtime speed up while keeping most of the accuracy
:: Using OpenPose 1 frame and tracking another frame
./build/examples/openpose/openpose.bin --tracking 1 --number_people_max 1
3 Visual smoothness
# Running both OpenPose and tracking on each frame. Note: There is no speed up/slow down
./build/examples/openpose/openpose.bin --tracking 0 --number_people_max 1
边栏推荐
猜你喜欢
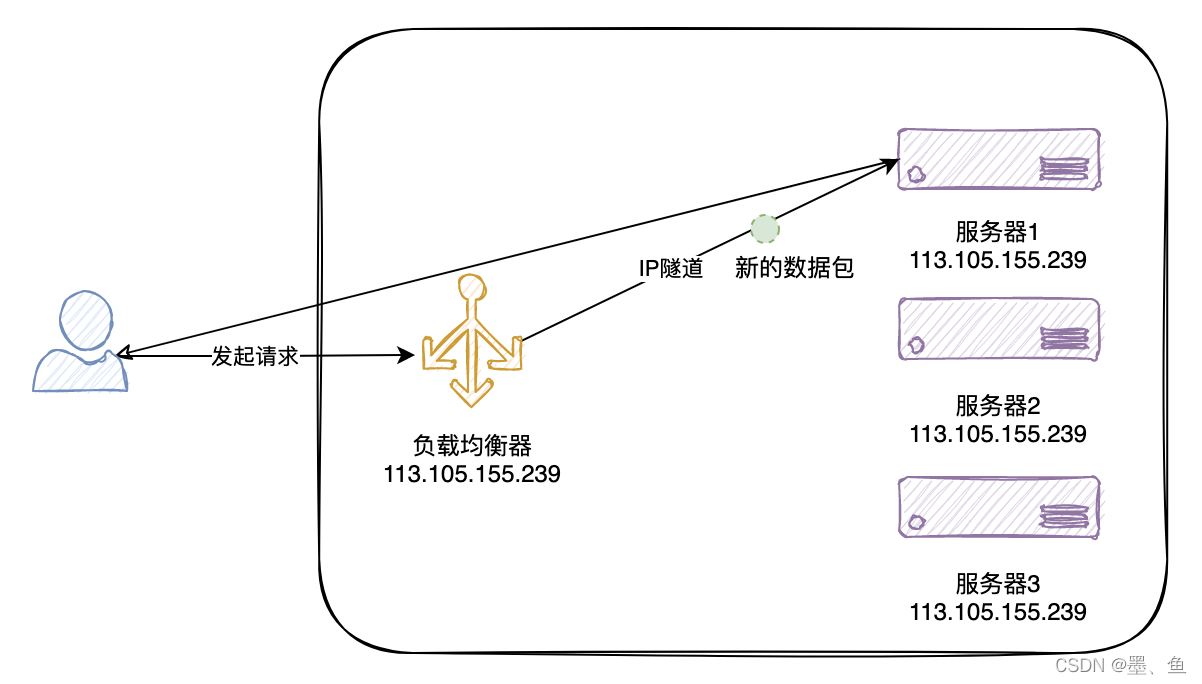
深入理解负载均衡
许多代码……
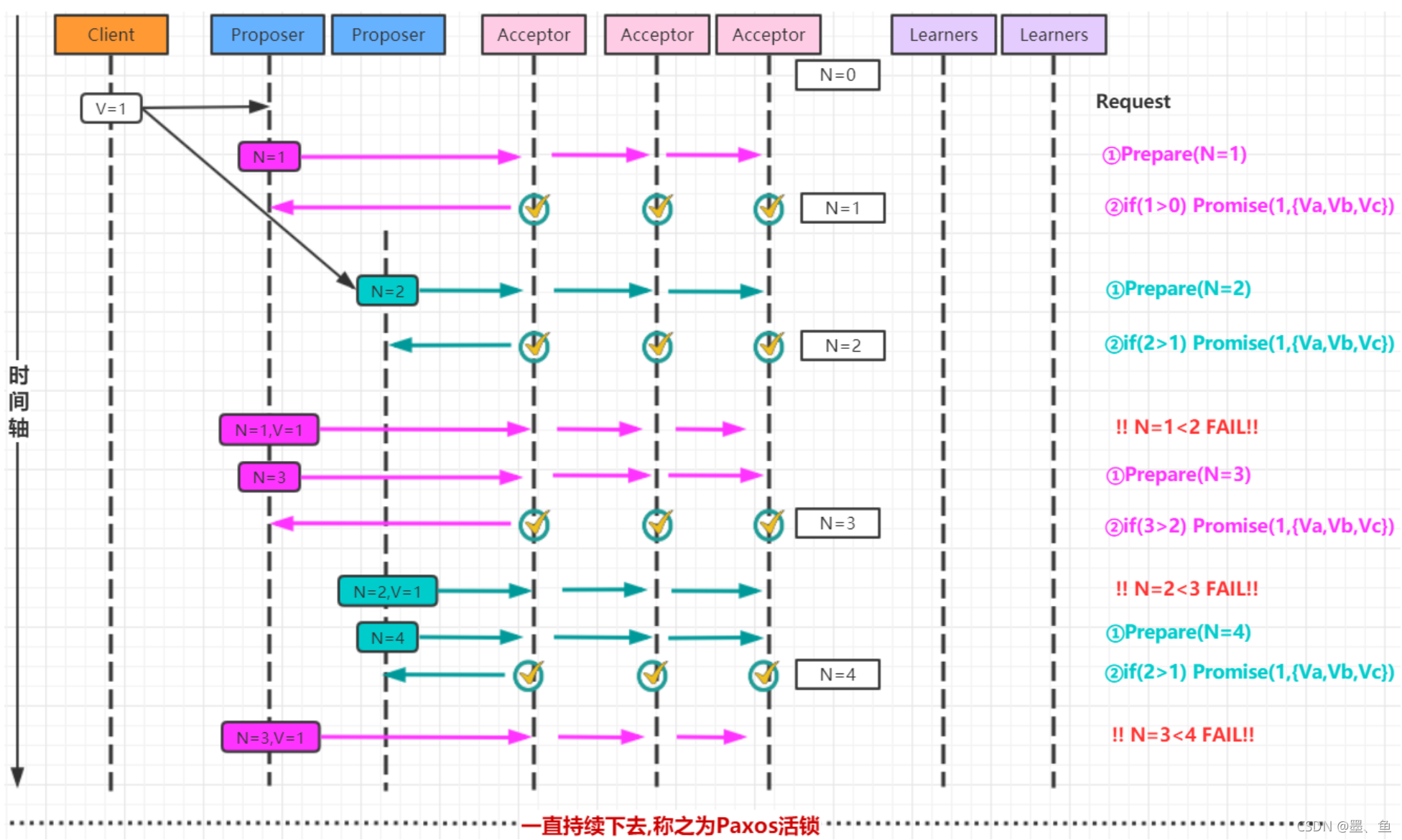
分布式一致性协议-Paxos
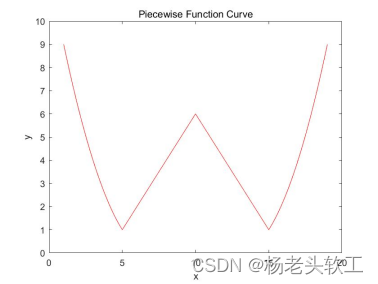
Detailed explanation of MATLAB drawing function fplot
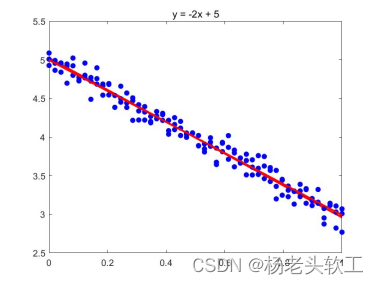
Based on the matrix calculation in the linear regression equation of the coefficient estimates
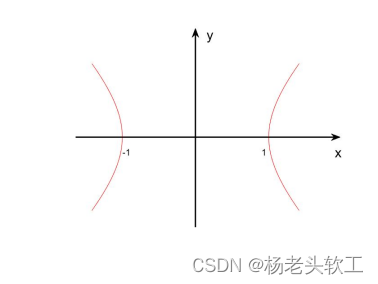
MATLAB drawing command fimplicit detailed introduction to drawing implicit function graphics
泰伯效应的建模
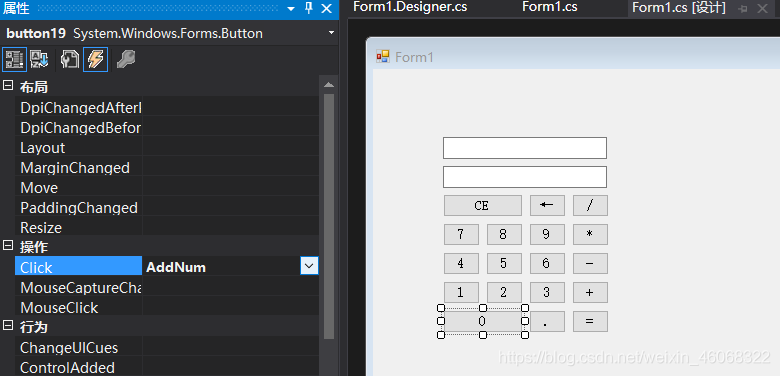
C#实现简单的计算器

【进程间通信】信号量的使用/共享内存
你的站点可能还没有准备好用于Site KitSite Kit 无法访问 WordPress REST API。请确保其已在您的站点上启用。
随机推荐
STM32LL library - USART interrupt to receive variable length information
unity-shader(入门)
mysql学习总结 & 索引
4. Publish Posts, Comment on Posts
golang的内存相关内容
数学工具-desmos 图形曲线
MMD->Unity一站式解决方案
从FAST TCP到POWERTCP
第二十六章:二维数组
Happy, 9/28 scene collection
5. Transaction management
冷读123
SkyWalking Agent数据采集和上报原理浅析
求解斐波那契数列的若干方法
Qt | 显示网络图片 QNetworkAccessManager
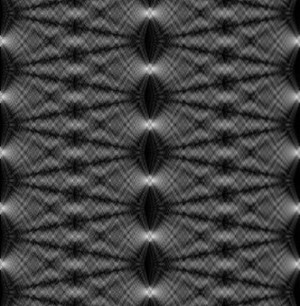
锥形相位掩模的Talbot图像
idea同时修改相同单词
couldn't find 'libflutter.so' --flutter
Based on the matrix calculation in the linear regression equation of the coefficient estimates
剑指offer:反转链表