当前位置:网站首页>High level API of propeller to realize face key point detection
High level API of propeller to realize face key point detection
2022-07-23 12:02:00 【KHB1698】
High level of propeller API Realize face key point detection
Project links :https://aistudio.baidu.com/aistudio/projectdetail/1487972
One 、 Problem definition
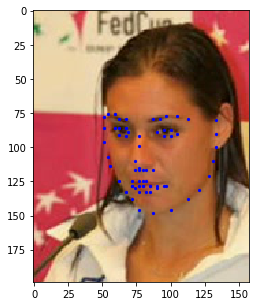
Face key point detection , Is to input a face picture , The model will return a series of coordinates of the key points of the face , So as to locate the key information of the face .

# Environment import
import os
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import cv2
import paddle
paddle.set_device('gpu') # Set to GPU
import warnings
warnings.filterwarnings('ignore') # Ignore warning
Two 、 Data preparation
2.1 Download datasets
The data set used in this experiment comes from github Of Open source project
At present, the data set has been uploaded to AI Studio Face key point recognition , After loading, you can directly use the following command to decompress .
!unzip data/data69065/data.zip
The structure of the decompressed data set is
data/
|—— test
| |—— Abdel_Aziz_Al-Hakim_00.jpg
... ...
|—— test_frames_keypoints.csv
|—— training
| |—— Abdullah_Gul_10.jpg
... ...
|—— training_frames_keypoints.csv
among ,training and test The folder stores training sets and test sets respectively .training_frames_keypoints.csv and test_frames_keypoints.csv There are labels for training sets and test sets . Next , Let's observe first training_frames_keypoints.csv file , Take a look at how the label of the training set is defined .
key_pts_frame = pd.read_csv('data/training_frames_keypoints.csv') # Reading data sets
print('Number of images: ', key_pts_frame.shape[0]) # Output dataset size
key_pts_frame.head(5) # Look at the first five data
Number of images: 3462
| Unnamed: 0 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ... | 126 | 127 | 128 | 129 | 130 | 131 | 132 | 133 | 134 | 135 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | Luis_Fonsi_21.jpg | 45.0 | 98.0 | 47.0 | 106.0 | 49.0 | 110.0 | 53.0 | 119.0 | 56.0 | ... | 83.0 | 119.0 | 90.0 | 117.0 | 83.0 | 119.0 | 81.0 | 122.0 | 77.0 | 122.0 |
| 1 | Lincoln_Chafee_52.jpg | 41.0 | 83.0 | 43.0 | 91.0 | 45.0 | 100.0 | 47.0 | 108.0 | 51.0 | ... | 85.0 | 122.0 | 94.0 | 120.0 | 85.0 | 122.0 | 83.0 | 122.0 | 79.0 | 122.0 |
| 2 | Valerie_Harper_30.jpg | 56.0 | 69.0 | 56.0 | 77.0 | 56.0 | 86.0 | 56.0 | 94.0 | 58.0 | ... | 79.0 | 105.0 | 86.0 | 108.0 | 77.0 | 105.0 | 75.0 | 105.0 | 73.0 | 105.0 |
| 3 | Angelo_Reyes_22.jpg | 61.0 | 80.0 | 58.0 | 95.0 | 58.0 | 108.0 | 58.0 | 120.0 | 58.0 | ... | 98.0 | 136.0 | 107.0 | 139.0 | 95.0 | 139.0 | 91.0 | 139.0 | 85.0 | 136.0 |
| 4 | Kristen_Breitweiser_11.jpg | 58.0 | 94.0 | 58.0 | 104.0 | 60.0 | 113.0 | 62.0 | 121.0 | 67.0 | ... | 92.0 | 117.0 | 103.0 | 118.0 | 92.0 | 120.0 | 88.0 | 122.0 | 84.0 | 122.0 |
5 rows × 137 columns
Each row in the above table represents a piece of data , among , The first column is the file name of the picture , And then from 0 Column to the first 135 Column , This is the key point information of the graph . Because each key point can be represented by two coordinates , therefore 136/2 = 68, You can see that this data set is 68 Point face key data set .
Tips1: Currently commonly used face key point annotation , Mark with the following points
- 5 spot
- 21 spot
- 68 spot
- 98 spot
Tips2: The... Used this time 68 mark , The order of marking is as follows :

# Calculate the mean and standard deviation of the label , Normalization for labels
key_pts_values = key_pts_frame.values[:,1:] # Take out the label information
data_mean = key_pts_values.mean() # Calculate the mean
data_std = key_pts_values.std() # Calculate the standard deviation
print(' The average value of the label is :', data_mean)
print(' The standard deviation of the label is :', data_std)
The average value of the label is : 104.4724870017331
The standard deviation of the label is : 43.17302271754281
2.2 Look at the image
def show_keypoints(image, key_pts): """ Args: image: Image information key_pts: Key point information , Show pictures and key information """ plt.imshow(image.astype('uint8')) # Show picture information for i in range(len(key_pts)//2,): plt.scatter(key_pts[i*2], key_pts[i*2+1], s=20, marker='.', c='b') # Show key information
# Display a single piece of data
n = 14 # n Index data in a table
image_name = key_pts_frame.iloc[n, 0] # Get image name
key_pts = key_pts_frame.iloc[n, 1:].values # The image label Format to numpy.array The format of
key_pts = key_pts.astype('float').reshape(-1) # Get image key information
print(key_pts.shape)
plt.figure(figsize=(5, 5)) # The size of the displayed image
show_keypoints(mpimg.imread(os.path.join('data/training/', image_name)), key_pts) # Display images and key point information
plt.show() # Show the image
(136,)
2.3 Dataset definition
Use the propeller frame API Of paddle.io.Dataset Custom dataset class , Please refer to the official website for details Custom datasets .
according to __init__ Defined in the , Realization __getitem__ and __len__.
# according to Dataset The standard of use , Build face key point data set
from paddle.io import Dataset
class FacialKeypointsDataset(Dataset):
# Face key data set
""" Step one : Inherit paddle.io.Dataset class """
def __init__(self, csv_file, root_dir, transform=None):
""" Step two : Implement constructors , Define the dataset size Args: csv_file (string): Marked csv File path root_dir (string): Folder path of image storage transform (callable, optional): Data processing method applied to image """
self.key_pts_frame = pd.read_csv(csv_file) # Read csv file
self.root_dir = root_dir # Get the picture folder path
self.transform = transform # obtain transform Method
def __getitem__(self, idx):
""" Step three : Realization __getitem__ Method , The definition specifies index How to get data when , And return a single piece of data ( Training data , Corresponding label ) """
image_name = os.path.join(self.root_dir,self.key_pts_frame.iloc[idx,0])
# Get images
image = mpimg.imread(image_name)
# Image format processing , If you include alpha passageway , Then ignore him , Only take the first three channels
if(image.shape[2] == 4):
image = image[:,:,0:3]
# Get key information
key_pts = self.key_pts_frame.iloc[idx,1:].values
key_pts = key_pts.astype('float').reshape(-1) # [136,1]
# If you define transform Method , Use transform Method
if self.transform:
image,key_pts = self.transform([image,key_pts])
# To numpy Data format
image = np.array(image,dtype='float32')
key_pts = np.array(key_pts,dtype='float32')
return image, key_pts
def __len__(self):
""" Step four : Realization __len__ Method , Returns the total number of datasets """
return len(self.key_pts_frame) # Return dataset size , That is, the number of pictures
2.4 Training set visualization
Instantiate the dataset and display some images .
# Build a dataset class
face_dataset = FacialKeypointsDataset(csv_file='data/training_frames_keypoints.csv',
root_dir='data/training/')
# Output dataset size
print(' The data set size is : ', len(face_dataset))
# according to face_dataset Visual datasets
num_to_display = 3
for i in range(num_to_display):
# Define image size
fig = plt.figure(figsize=(20,10))
# Randomly select pictures
rand_i = np.random.randint(0, len(face_dataset))
sample = face_dataset[rand_i]
# Output picture size and number of keys
print(i, sample[0].shape, sample[1].shape)
# Set picture printing information
ax = plt.subplot(1, num_to_display, i + 1)
ax.set_title('Sample #{}'.format(i))
# Output pictures
show_keypoints(sample[0], sample[1])
The data set size is : 34620 (211, 186, 3) (136,)1 (268, 228, 3) (136,)2 (191, 164, 3) (136,)



Although the above code completes the definition of the data set , But there are still some problems , Such as :
- The size of each image is different , The image size needs to be unified to meet the network input requirements
- The image format needs to adapt to the format input requirements of the model
- The amount of data is relatively small , No data enhancement
These problems will affect the final performance of the model , So we need to preprocess the data .
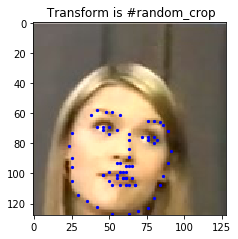
2.5 Transforms
Preprocess the image , Including graying 、 normalization 、 Resize 、 Random cutting , Modify the channel format and so on , To meet the data requirements ; The functions of each category are as follows :
- Graying : Discard color information , Preserve image edge information ; The recognition algorithm is not strongly dependent on color , The robustness will decrease after adding color , And the dimension of grayscale image decreases (3->1), Keeping the gradient will speed up the calculation .
- normalization : Speed up convergence
- Resize : Data to enhance
- Random cutting : Data to enhance
- Modify the channel format : Change to the structure required by the model
# Standardized customization transform Method
class TransformAPI(object):
""" Step one : Inherit object class """
def __call__(self, data):
""" Step two : stay __call__ Define data processing methods in """
processed_data = data
return processed_data
import paddle.vision.transforms.functional as F
class GrayNormalize(object):
# Change the picture to grayscale , And reduce its value to [0, 1]
# take label Zoom in to [-1, 1] Between
def __call__(self, data):
image = data[0] # Get photo
key_pts = data[1] # Get tag
image_copy = np.copy(image)
key_pts_copy = np.copy(key_pts)
# Grayscale the picture
gray_scale = paddle.vision.transforms.Grayscale(num_output_channels=3)
image_copy = gray_scale(image_copy)
# Zoom the picture value to [0, 1]
image_copy = image_copy / 255.0
# Zoom the coordinate point to [-1, 1]
mean = data_mean # Get the average value of the tag
std = data_std # Get the standard deviation of the label
key_pts_copy = (key_pts_copy - mean)/std
return image_copy, key_pts_copy
class Resize(object):
# Adjust the input image to the specified size
def __init__(self, output_size):
assert isinstance(output_size, (int, tuple))
self.output_size = output_size
def __call__(self, data):
image = data[0] # Get photo
key_pts = data[1] # Get tag
image_copy = np.copy(image)
key_pts_copy = np.copy(key_pts)
h, w = image_copy.shape[:2]
if isinstance(self.output_size, int):
if h > w:
new_h, new_w = self.output_size * h / w, self.output_size
else:
new_h, new_w = self.output_size, self.output_size * w / h
else:
new_h, new_w = self.output_size
new_h, new_w = int(new_h), int(new_w)
img = F.resize(image_copy, (new_h, new_w))
# scale the pts, too
key_pts_copy[::2] = key_pts_copy[::2] * new_w / w
key_pts_copy[1::2] = key_pts_copy[1::2] * new_h / h
return img, key_pts_copy
class RandomCrop(object):
# Crop the input image at random position
def __init__(self, output_size):
assert isinstance(output_size, (int, tuple))
if isinstance(output_size, int):
self.output_size = (output_size, output_size)
else:
assert len(output_size) == 2
self.output_size = output_size
def __call__(self, data):
image = data[0]
key_pts = data[1]
image_copy = np.copy(image)
key_pts_copy = np.copy(key_pts)
h, w = image_copy.shape[:2]
new_h, new_w = self.output_size
top = np.random.randint(0, h - new_h)
left = np.random.randint(0, w - new_w)
image_copy = image_copy[top: top + new_h,
left: left + new_w]
key_pts_copy[::2] = key_pts_copy[::2] - left
key_pts_copy[1::2] = key_pts_copy[1::2] - top
return image_copy, key_pts_copy
class ToCHW(object):
# Change the format of the image from HWC Change it to CHW
def __call__(self, data):
image = data[0]
key_pts = data[1]
transpose = T.Transpose((2,0,1))
image = transpose(image)
return image, key_pts
Take a look at the effect of each image preprocessing method .
import paddle.vision.transforms as T
# test Resize
resize = Resize(256)
# test RandomCrop
random_crop = RandomCrop(128)
# test GrayNormalize
norm = GrayNormalize()
# test Resize + RandomCrop, The image size changes to 250*250, Then cut out 224*224 The image block of
composed = paddle.vision.transforms.Compose([Resize(250), RandomCrop(224)])
test_num = 800 # Test data subscript
data = face_dataset[test_num]
transforms = {
'None': None,
'norm': norm,
'random_crop': random_crop,
'resize': resize ,
'composed': composed}
for i, func_name in enumerate(['None', 'norm', 'random_crop', 'resize', 'composed']):
# Define image size
fig = plt.figure(figsize=(20,10))
# Processing images
if transforms[func_name] != None:
transformed_sample = transforms[func_name](data)
else:
transformed_sample = data
# Set picture printing information
ax = plt.subplot(1, 5, i + 1)
ax.set_title(' Transform is #{}'.format(func_name))
# Output pictures
show_keypoints(transformed_sample[0], transformed_sample[1])




2.6 Use data preprocessing to complete data definition
Let's go Resize、RandomCrop、GrayNormalize、ToCHW Apply to new data sets
from paddle.vision.transforms import Compose
data_transform = Compose([Resize(256), RandomCrop(224), GrayNormalize(), ToCHW()])
# create the transformed dataset
train_dataset = FacialKeypointsDataset(csv_file='data/training_frames_keypoints.csv',
root_dir='data/training/',
transform=data_transform)
print('Number of train dataset images: ', len(train_dataset))
for i in range(4):
sample = train_dataset[i]
print(i, sample[0].shape, sample[1].shape)
test_dataset = FacialKeypointsDataset(csv_file='data/test_frames_keypoints.csv',
root_dir='data/test/',
transform=data_transform)
print('Number of test dataset images: ', len(test_dataset))
Number of train dataset images: 3462
0 (3, 224, 224) (136,)
1 (3, 224, 224) (136,)
2 (3, 224, 224) (136,)
3 (3, 224, 224) (136,)
Number of test dataset images: 770
3、 Model building
3.1 Networking can be very simple
According to the above analysis, we can see , Face key point detection and classification , The same network structure can be used , Such as LeNet、Resnet50 When the feature extraction is completed , Just on the original basis , The last part of the model needs to be modified , Adjust the output to Number of face keys *2, That is, the abscissa and ordinate of each face key point , You can complete the task of face key point detection , See the following code for details , You can also refer to the case on the official website : Face key point detection
The network structure is as follows :
import paddle.nn as nn
from paddle.vision.models import resnet50
class SimpleNet(nn.Layer):
def __init__(self, key_pts):
super(SimpleNet, self).__init__()
# Use resnet50 As backbone
self.backbone = paddle.vision.models.resnet50(pretrained= True)
# Add the first linear transformation layer
self.linear1 = nn.Linear(in_features=1000, out_features= 512)
# Use ReLU Activation function
self.act1 = nn.ReLU()
# Add a second linear transformation layer as the output , The number of output elements is key_pts*2, Coordinates representing each key point
self.linear2 = nn.Linear(in_features= 512,out_features= key_pts*2)
def forward(self, x):
x = self.backbone(x)
x = self.linear1(x)
x = self.act1(x)
x = self.linear2(x)
return x
3.2 Network structure visualization
Use model.summary Visual network structure .
model = paddle.Model(SimpleNet(key_pts=68))
# random_crop [224, 224, 3]
# to_chw [3, 224, 224]
model.summary((-1, 3, 224, 224))
Four 、 model training
4.1 The model configuration
Before training the model , You need to set the optimizer required by the training model , Loss function and evaluation index .
- Optimizer :Adam Optimizer , Fast convergence .
- Loss function :SmoothL1Loss
- Evaluation indicators :NME
4.2 Custom evaluation indicators
Task specific Metric The calculation method is existing in the frame Metric There is no... In the interface , Or the algorithm does not meet their own needs , Then we need to do it ourselves Metric The custom of . Here's how to Metric Custom operation of , For more information, please refer to the official website Customize Metric; Let's start with the following code .
from paddle.metric import Metric
class NME(Metric):
""" 1. Inherit paddle.metric.Metric """
def __init__(self, name='nme', *args, **kwargs):
""" 2. Constructor implementation , Just customize the parameters """
super(NME, self).__init__(*args, **kwargs)
self._name = name
self.rmse = 0
self.sample_num = 0
def name(self):
""" 3. Realization name Method , Return the defined evaluation indicator name """
return self._name
def update(self, preds, labels):
""" 4. Realization update Method , For a single batch Calculate the evaluation index during training . - When `compute` When a class function is not implemented , The calculated output of the model and the flattening of the label data will be used as `update` Parameters passed in . """
N = preds.shape[0]
preds = preds.reshape((N, -1, 2))
labels = labels.reshape((N, -1, 2))
self.rmse = 0
for i in range(N):
pts_pred, pts_gt = preds[i, ], labels[i, ]
interocular = np.linalg.norm(pts_gt[36, ] - pts_gt[45, ])
self.rmse += np.sum(np.linalg.norm(pts_pred - pts_gt, axis=1)) / (interocular * preds.shape[1])
self.sample_num += 1
return self.rmse / N
def accumulate(self):
""" 5. Realization accumulate Method , Back to history batch The evaluation index value calculated after training accumulation . Every time `update` Data accumulation during call ,`accumulate` During calculation, all accumulated data are calculated and returned . The settlement result will be in `fit` In the training log of the interface . """
return self.rmse / self.sample_num
def reset(self):
""" 6. Realization reset Method , Every Epoch Reset the evaluation index after completion , So next Epoch You can recalculate . """
self.rmse = 0
self.sample_num = 0
4.3 Realize the configuration and training of the model
# Use paddle.Model Packaging model
model = paddle.Model(SimpleNet(key_pts=68))
# Definition Adam Optimizer
optimizer = paddle.optimizer.Adam(learning_rate=0.001,weight_decay=5e-4,parameters=model.parameters())
# Definition SmoothL1Loss
loss = nn.SmoothL1Loss()
# Use customization metrics
metric = NME()
# Configuration model
model.prepare(optimizer = optimizer, loss=loss, metrics = metric)
The choice of loss function :L1Loss、L2Loss、SmoothL1Loss Comparison of
- L1Loss: At the end of training , Forecast value and ground-truth The difference is small , The absolute value of the derivative of the loss to the predicted value is still 1, At this time, if the learning rate remains unchanged , The loss function will fluctuate near the stable value , It is difficult to continue to converge to higher accuracy .
- L2Loss: At the beginning of training , Forecast value and ground-truth When the difference is large , The gradient of the loss function to the predicted value is very large , Lead to unstable training .
- SmoothL1Loss: stay x More hours , Yes x The gradient will also decrease , And in the x When a large , Yes x The absolute value of the gradient reaches the upper limit 1, It's not too big to break the network parameters .
model.fit(train_dataset,epochs=50, batch_size=64,verbose =1)
4.4 Model preservation
checkpoints_path = './checkpoints/models'
model.save(checkpoints_path)
5、 ... and 、 Model to predict
# Define function
def show_all_keypoints(image, predicted_key_pts):
""" Show the image , Predict the key points Args: image: Cropped image [224, 224, 3] predicted_key_pts: Coordinates of key points of prediction """
# Show the image
plt.imshow(image.astype('uint8'))
# Show key points
for i in range(0, len(predicted_key_pts), 2):
plt.scatter(predicted_key_pts[i], predicted_key_pts[i+1], s=20, marker='.', c='m')
def visualize_output(test_images, test_outputs, batch_size=1, h=20, w=10):
""" Show the image , Predict the key points Args: test_images: Cropped image [224, 224, 3] test_outputs: Model output batch_size: Batch size h: The displayed image is high w: The displayed image is wide """
if len(test_images.shape) == 3:
test_images = np.array([test_images])
for i in range(batch_size):
plt.figure(figsize=(h, w))
ax = plt.subplot(1, batch_size, i+1)
# Randomly cropped image
image = test_images[i]
# Model output , Unreduced predicted key coordinate values
predicted_key_pts = test_outputs[i]
# Restore the real key coordinate value
predicted_key_pts = predicted_key_pts * data_std + data_mean
# Show images and key points
show_all_keypoints(np.squeeze(image), predicted_key_pts)
plt.axis('off')
plt.show()
# Read images
img = mpimg.imread('xiaojiejie.jpg')
# Key placeholder
kpt = np.ones((136, 1))
transform = Compose([Resize(256), RandomCrop(224)])
# Redefine the size of the image first , And cut it to 224*224 Size
rgb_img, kpt = transform([img, kpt])
norm = GrayNormalize()
to_chw = ToCHW()
# Normalize and format transform the image
img, kpt = norm([rgb_img, kpt])
img, kpt = to_chw([img, kpt])
img = np.array([img], dtype='float32')
# Load the saved model for prediction
model = paddle.Model(SimpleNet(key_pts=68))
model.load(checkpoints_path)
model.prepare()
# Predicted results
out = model.predict_batch([img])
out = out[0].reshape((out[0].shape[0], 136, -1))
# visualization
visualize_output(rgb_img, out, batch_size=1)

6、 ... and 、 Interesting application
When we get the key information , You can make some interesting applications .
# Define function
def show_fu(image, predicted_key_pts):
""" Show the pasted image Args: image: Cropped image [224, 224, 3] predicted_key_pts: Coordinates of key points of prediction """
# Calculate the coordinate ,15 and 34 The middle value of the point
x = (int(predicted_key_pts[28]) + int(predicted_key_pts[66]))//2
y = (int(predicted_key_pts[29]) + int(predicted_key_pts[67]))//2
# open Little picture of Spring Festival
star_image = mpimg.imread('light.jpg')
# Processing channels
if(star_image.shape[2] == 4):
star_image = star_image[:,:,1:4]
# Put the small picture of Spring Festival on the original picture
image[y:y+len(star_image[0]), x:x+len(star_image[1]),:] = star_image
# Show the processed picture
plt.imshow(image.astype('uint8'))
# Show key information
for i in range(len(predicted_key_pts)//2,):
plt.scatter(predicted_key_pts[i*2], predicted_key_pts[i*2+1], s=20, marker='.', c='m') # Show key information
def custom_output(test_images, test_outputs, batch_size=1, h=20, w=10):
""" Show the image , Predict the key points Args: test_images: Cropped image [224, 224, 3] test_outputs: Model output batch_size: Batch size h: The displayed image is high w: The displayed image is wide """
if len(test_images.shape) == 3:
test_images = np.array([test_images])
for i in range(batch_size):
plt.figure(figsize=(h, w))
ax = plt.subplot(1, batch_size, i+1)
# Randomly cropped image
image = test_images[i]
# Model output , Unreduced predicted key coordinate values
predicted_key_pts = test_outputs[i]
# Restore the real key coordinate value
predicted_key_pts = predicted_key_pts * data_std + data_mean
# Show images and key points
show_fu(np.squeeze(image), predicted_key_pts)
plt.axis('off')
plt.show()
# Read images
img = mpimg.imread('xiaojiejie.jpg')
# Key placeholder
kpt = np.ones((136, 1))
transform = Compose([Resize(256), RandomCrop(224)])
# Redefine the size of the image first , And cut it to 224*224 Size
rgb_img, kpt = transform([img, kpt])
norm = GrayNormalize()
to_chw = ToCHW()
# Normalize and format transform the image
img, kpt = norm([rgb_img, kpt])
img, kpt = to_chw([img, kpt])
img = np.array([img], dtype='float32')
# Load the saved model for prediction
# model = paddle.Model(SimpleNet())
# model.load(checkpoints_path)
# model.prepare()
# Predicted results
out = model.predict_batch([img])
out = out[0].reshape((out[0].shape[0], 136, -1))
# visualization
custom_output(rgb_img, out, batch_size=1)

边栏推荐
猜你喜欢








随机推荐
strand
Software test 1
Service Service
Circular queue
UE4解决WebBrowser无法播放H.264的问题
Implementation of neural network for face recognition
Yolov3关键代码解读
UItextview的textViewDidChange的使用技巧
MySQL数据库
链表相关面试题
MySQL存储引擎
TCP/IP协议
Affichage itératif des fichiers.h5, opérations de données h5py
笔记|(b站)刘二大人:pytorch深度学习实践(代码详细笔记,适合零基础)
VIO---Boundle Adjustment求解过程
Understanding of the decoder in the transformer in NLP
Mosaic the face part of the picture
MySQL view
8、 Collection framework and generics
Data warehouse 4.0 notes - user behavior data collection IV