当前位置:网站首页>倍福TwinCAT3伺服控制常用功能块的实现
倍福TwinCAT3伺服控制常用功能块的实现
2022-06-22 03:29:00 【黄昏和星空】
2、伺服PTP功能块定义
2.1定义轴变量
_axis1: AXIS_REF; //轴变量
2.2添加轴控制指令
定义功能块变量:
MC_POWER_0: MC_POWER; //轴使能
MC_Reset_0: MC_Reset; //轴复位
MC_Stop_0: MC_Stop; //轴停止
MC_Jog_0: MC_Jog;
MC_MoveAdditive_0: MC_MoveAdditive;
MC_MoveRelative_0: MC_MoveRelative;
MC_MoveAbsolute_0: MC_MoveAbsolute;
MC_MoveVelocity_0: MC_MoveVelocity;
MC_SetOverride_0: MC_SetOverride; //设置轴速度缩放系数
MC_SetPosition_0: MC_SetPosition; //设置当前位置
MC_ReadActualPosition_0: MC_ReadActualPosition;
MC_ReadActualVelocity_0: MC_ReadActualVelocity;
MC_ReadStatus_0: MC_ReadStatus;
2.3添加全局变量
定义控制的全局变量:
//轴控制指令
bi_Power: BOOL; //使能
bi_Reset: BOOL; //复位
bi_Stop: BOOL; //停止
bi_JogForward: BOOL; //正向点动
bi_JogBackwards: BOOL; //反向点动
bi_MoveAdditive: BOOL; //增量位置运动
bi_MoveRelative: BOOL; //相对位置运动
bi_MoveAbsolute: BOOL; //绝对位置运动
bi_MoveVelocity: BOOL; //速度方式运动
bi_SetOverride: BOOL; //轴速度缩放启用
bi_SetPosition: BOOL; //增量式伺服,设置当前位置值
bi_AxisRead: BOOL; //读取轴的状态
定义输入的控制参数变量:
//轴运动参数设置
di_Stop_Deceleration: LREAL:=4000; //停止速度(MC_Stop)
di_SetPosition: LREAL:=0; //
di_Jog_Velocity: LREAL;
di_Jog_Acceleration: LREAL:=3000;
di_Jog_Deceleration: LREAL:=3000;
di_Jog_Jerk: LREAL:=0; //加加速度。
di_MoveAdditive_Distance: LREAL:=0;
di_MoveAdditive_Velocity: LREAL:=100;
di_MoveAdditive_Acceleration: LREAL:=500;
di_MoveAdditive_Deceleration: LREAL:=500;
di_MoveAdditive_Jerk: LREAL:=0;
di_MoveRelative_Distance: LREAL:=0;
di_MoveRelative_Velocity: LREAL:=100;
di_MoveRelative_Acceleration: LREAL:=500;
di_MoveRelative_Deceleration: LREAL:=500;
di_MoveRelative_Jerk: LREAL:=0;
di_MoveAbsolute_Position: LREAL:=0;
di_MoveAbsolute_Velocity: LREAL:=100;
di_MoveAbsolute_Acceleration: LREAL:=500;
di_MoveAbsolute_Deceleration: LREAL:=500;
di_MoveAbsolute_Jerk: LREAL:=0;
di_MoveVelocity_Velocity: LREAL:=100;
di_MoveVelocity_Acceleration: LREAL:=500;
di_MoveVelocity_Deceleration: LREAL:=500;
di_MoveVelocity_Jerk: LREAL:=0;
di_MoveVelocity_Direction: MC_Direction:=1; //1:Positive 3:Negative
di_VelFactor: LREAL:=1.0; //1.0=100% 范围:0.01-1.0
定义存储反馈得轴状态变量
//轴状态反馈
bo_AxisError: BOOL;
bo_ErrorStop: BOOL; //故障未复位的情况下再次转动电机输出故障停车信号
bo_Homing: BOOL; //轴回原点进行中
bo_Homed: BOOL; //轴已经回原点
bo_Moving: BOOL; //轴运动中
bo_Disabled: BOOL;
bo_Stopping: BOOL; //停止信号输出一次
bo_StandStill: BOOL; //待机中
bo_DiscreteMotion: BOOL; //不连续运动
bo_ContinuousMotion: BOOL; //连续运动
bo_SynchronizedMotion: BOOL; //同步运动
bo_ConstantVelocity: BOOL; //恒速运行中
bo_Accelerating: BOOL; //加速中
bo_Decelerating: BOOL; //减速中
//
do_ActualPosition: LREAL; //轴当前位置
do_ActualVelocity: LREAL; //轴当前速度
do_AxisErroID: DWORD; //故障代码
dg_ActualTorque AT%I*: INT; // Axises's Actual Torque
2.4轴控功能块ST语言实现
//*轴使能
MC_POWER_0(
Axis:= _axis1,
Enable:= bi_Power, //TRUE使能,FALSE去使能
Enable_Positive:= TRUE,
Enable_Negative:= TRUE,
Override:= ,
BufferMode:= ,
Options:= ,
Status=> ,
Busy=> ,
Active=> ,
Error=> ,
ErrorID=> );
//*轴复位
MC_Reset_0(
Axis:= _axis1,
Execute:= bi_Reset, //上升沿信号触发
Done=> ,
Busy=> ,
Error=> ,
ErrorID=> );
//*轴停机
MC_Stop_0(
Axis:= _axis1,
Execute:= bi_Stop, //上升沿信号触发
Deceleration:= di_Stop_Deceleration,
Jerk:= ,
Options:= ,
Done=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
//Jog点动
MC_Jog_0(
Axis:= _axis1,
JogForward:= bi_JogForward,
JogBackwards:= bi_JogBackwards,
Mode:= MC_JOGMODE_CONTINOUS, //点动模式
Position:= ,
Velocity:= di_Jog_Velocity,
Acceleration:=di_Jog_Acceleration ,
Deceleration:= di_Jog_Deceleration,
Jerk:= di_Jog_Jerk,
Done=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
//*轴相对定位-MoveAdd //
MC_MoveAdditive_0(
Axis:= _axis1,
Execute:= bi_MoveAdditive, //上升沿信号触发
Distance:= di_MoveAdditive_Distance,
Velocity:= di_MoveAdditive_Velocity,
Acceleration:= di_MoveAdditive_Acceleration,
Deceleration:= di_MoveAdditive_Deceleration,
Jerk:= di_MoveAdditive_Jerk,
BufferMode:= ,
Options:= ,
Done=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
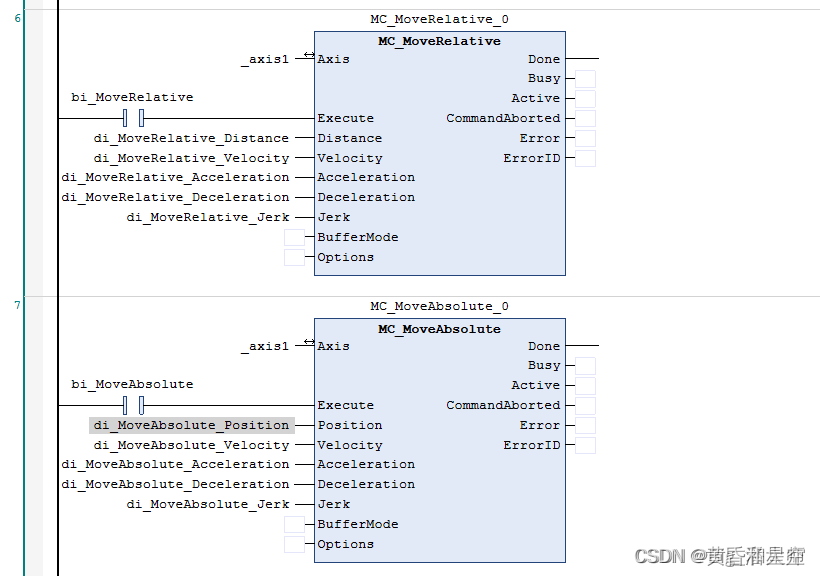
//*轴相对定位-MoveRela //
MC_MoveRelative_0(
Axis:= _axis1,
Execute:= bi_MoveRelative, //上升沿信号触发
Distance:= di_MoveRelative_Distance,
Velocity:= di_MoveRelative_Velocity,
Acceleration:= di_MoveRelative_Acceleration,
Deceleration:= di_MoveRelative_Deceleration,
Jerk:= di_MoveRelative_Jerk,
BufferMode:= ,
Options:= ,
Done=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
//**轴绝对定位启动
MC_MoveAbsolute_0(
Axis:= _axis1,
Execute:= bi_MoveAbsolute, //上升沿信号触发
Position:= di_MoveAbsolute_Position,
Velocity:= di_MoveAbsolute_Velocity,
Acceleration:= di_MoveAbsolute_Acceleration,
Deceleration:= di_MoveAbsolute_Deceleration,
Jerk:= di_MoveAbsolute_Jerk,
BufferMode:= ,
Options:= ,
Done=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
//**以速度方式运行
MC_MoveVelocity_0(
Axis:= _axis1,
Execute:= bi_MoveVelocity, //上升沿信号触发
Velocity:=di_MoveVelocity_Velocity ,
Acceleration:= di_MoveVelocity_Acceleration,
Deceleration:= di_MoveVelocity_Deceleration,
Jerk:= di_MoveVelocity_Jerk,
Direction:= di_MoveVelocity_Direction, //MC_Negative_Direction -> 反向 MC_Positive_Direction -> 正向
BufferMode:= ,
Options:= ,
InVelocity=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
//**轴速度缩放系数设置
MC_SetOverride_0(
Axis:= _axis1,
Enable:= bi_SetOverride, //TRUE生效,FALSE无效
VelFactor:= di_VelFactor, //1.0=100% 0.01-1.0
AccFactor:= ,
JerkFactor:= ,
Enabled=> ,
Busy=> ,
Error=> ,
ErrorID=> );
//*当前轴位置设置(增量式编码器电机)
MC_SetPosition_0(
Axis:= _axis1,
Execute:= bi_SetPosition, //TRUE生效,FALSE无效
Position:= 0,
Mode:= ,
Options:= ,
Done=> ,
Busy=> ,
Error=> ,
ErrorID=> );
IF MC_SetPosition_0.Done THEN
bi_SetPosition:=FALSE;
END_IF
//*读轴位置
MC_ReadActualPosition_0(
Axis:= _axis1,
Enable:= bi_AxisRead, //TRUE生效,FALSE无效
Valid=> ,
Busy=> ,
Error=> ,
ErrorID=> ,
Position=> do_ActualPosition);
//*读轴速度
MC_ReadActualVelocity_0(
Axis:= _axis1,
Enable:= bi_AxisRead, //TRUE生效,FALSE无效
Valid=> ,
Busy=> ,
Error=> ,
ErrorID=> ,
ActualVelocity=>do_ActualVelocity );
//*读轴状态
MC_ReadStatus_0(
Axis:= _axis1,
Enable:= bi_AxisRead, //TRUE生效,FALSE无效
Valid=> ,
Busy=> ,
Error=> bo_AxisError,
ErrorID=>do_AxisErroID ,
ErrorStop=> bo_ErrorStop,
Disabled=> bo_Disabled,
Stopping=> bo_Stopping,
StandStill=> bo_StandStill,
DiscreteMotion=> bo_DiscreteMotion,
ContinuousMotion=> bo_ContinuousMotion,
SynchronizedMotion=> bo_SynchronizedMotion,
Homing=> bo_Homing,
ConstantVelocity=> bo_ConstantVelocity,
Accelerating=> bo_Accelerating,
Decelerating=> bo_Decelerating,
Status=> );
2.5轴控功能块梯形图(LD)实现
1



2.6程序在线监控
ST程序在线
优点:注释和程序一目了然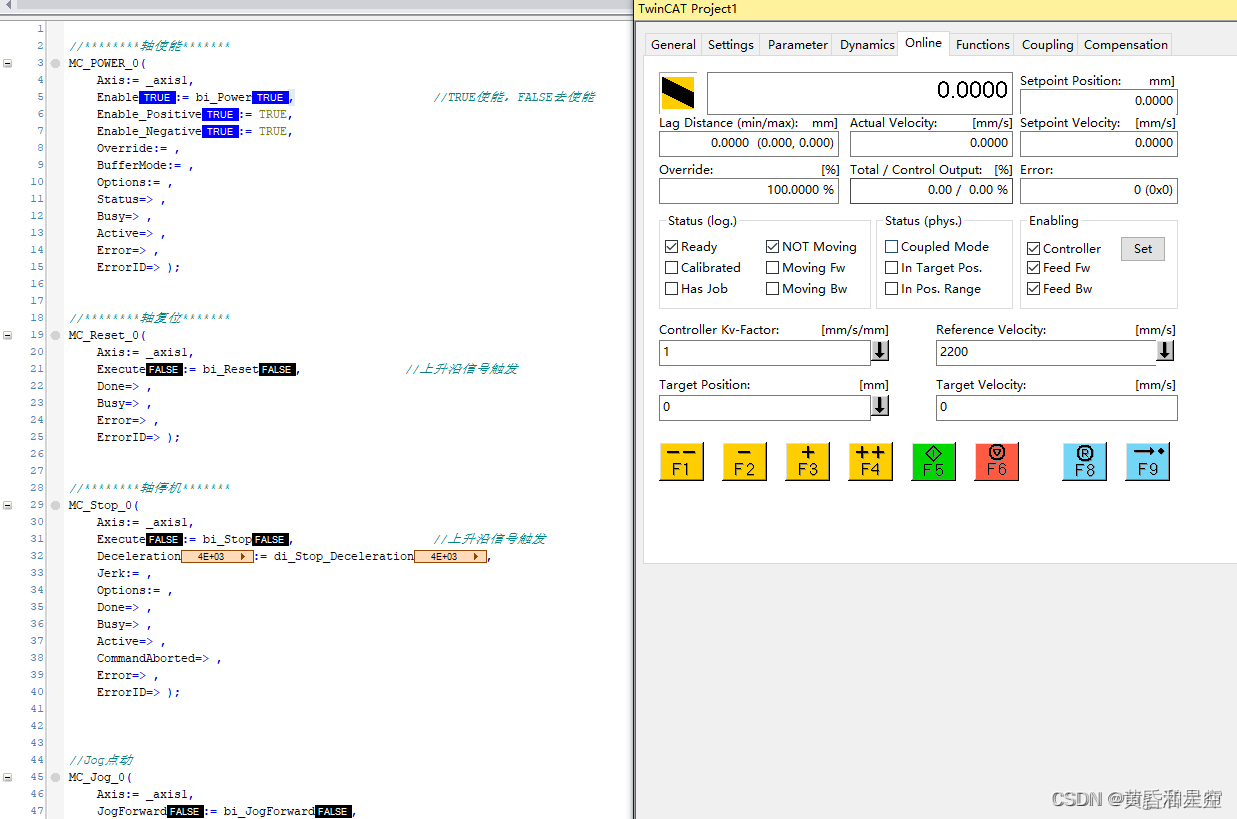
梯形图程序在线
优点:逻辑功能清晰,功能块得输入和输出清清楚楚

3、第三方伺服其它功能
3.1扭矩读取
读取第三方伺服的扭矩,需要通过关联PDO Maping的输出来读取,有的厂家伺服在IO扫描出来PDO Mapping中就有Torque,有的伺服厂家扫描出来没有,PDO Maping中没有Torque的需要手动添加。以台达A2和汇川IS620N分别举例:
首先在PLC程序添加变量:
hmi_ActualTorque AT%I*: INT; // Axises’s Actual Torque
变量添加好以后,PLC程序工程重新编译。
汇川IS620N

3.2增量式伺服回零
第三方增量式伺服回零方式主要有两种
方式1:DS402协议内部PDO方式回零。
优点:伺服自己运行、定位精度高
缺点:程序逻辑复杂、不同厂家数据协议不一样
具体用法参见:
TwinCAT3中台达A2增量编码器伺服使用PDO方式回零_panjinliang066333的博客-CSDN博客
方式2:使用伺服功能块MC_Jog和MC_SetPosition
优点:不同的厂家都可以通用、程序逻辑简单
缺点:定位精度低
用法:回零指令起动,伺服以Jog运动方式缓慢向零运动,当零点传感器检测到伺服到达信号Jog运动停止,然后使用MC_SetPosition设置当前位置为0,即伺服回零完成。若伺服刚开始就在零点传感器上,则Jog不会运动,伺服位置直接设置为零。
具体用法参见:
(注意:因为伺服回零是往一个方向运动,因此不管用哪种方式回零,在第一次回零的时候务必确保零点传感器在Jog运动的方向范围之内)
————————————————
版权声明:本文为CSDN博主「Big_潘大师」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/panjinliang066333/article/details/123423911
边栏推荐
- 基于Pytorch的图像分类总结:Swin Transformer
- 如何高效的读写文件思考
- zombie进程与orphan进程
- Select in golang concurrent programming
- [microservices | Nacos] Nacos implements the advanced version of distributed configuration center
- 3de从设计中恢复
- VIM common commands
- gdb调测使用整理
- 基于logback.xml实现保存日志信息的无感操作
- Configuration and optimization of redis cache database
猜你喜欢

逆向crackme之ESp定律脱壳

泛微 E-cology V9 信息泄露漏洞

调度功能:splunk-operator-controller-manager

Are you a technology manager or a project manager?
MySQL index creation, optimization analysis and index optimization

On the auto increment of int type primary key in MySQL

A component required a bean of type 'com.example.demo3.service.UserServiceImp' that could not be fou

AtCoder Regular Contest 142

3de 保存到收藏夹

多线程 interrupt用法
随机推荐
Wxml template syntax, wxss template style, global configuration, page configuration, and network data request
Summary of image classification based on pytoch: swing transformer
Based on logback XML to realize the insensitive operation of saving log information
mysql 查询表的字段的属性、注释、字段信息
A component required a bean of type 'com.example.demo3.service.UserServiceImp' that could not be fou
Select in golang concurrent programming
3de从设计中恢复
Rabbmitmq publishing keyword mode < 3 >
简单入门到彻底搞懂防抖和节流
MySQL index creation, optimization analysis and index optimization
3de 机器人吸盘抓box
作为接口的模板
美容院怎样做活动
关于在dialog中调用edittext这个件事
PHP uses composer
76. 最小覆盖子串-滑动窗口法
【NVMe2.0b 11】NVMe Reset
聊聊flink水位线
[nvme2.0b 9] controller initialization process
Atcoder beginer contest 252 (Dijkstra, reverse thinking)