当前位置:网站首页>【飞控开发高级教程2】疯壳·开源编队无人机-遥控整机代码走读、编译与烧写
【飞控开发高级教程2】疯壳·开源编队无人机-遥控整机代码走读、编译与烧写
2022-08-03 00:03:00 【efans_Mike】
COCOFLY教程
——疯壳·无人机·系列
遥控整机代码走读、编译与烧写

图1
一、代码架构
遥控的整体代码工程由 7 个工作组组成,分别是 Remoter、show、Driver、STM32_LIB、USB、USB/Lib 以及 Drv_Point,如下图所示。

图2
各个组的具体的代码功能如下表所示。

表1
二、代码走读
系统的主函数部分是整个代码的起始运行位置,在主函数内主要做三个事情:1、初始化外设及参数,2、轮询线程函数,3、菜单显示逻辑,其代码如下图所示。



图3
系统的每一个线程函数都已经分配好了运行周期,在不同的线程里执行不同的事情,线程的切换通过简单的逻辑处理形式切换,而系统的运行时间由 sysTick 提供,即系统的“滴答”时钟。各个线程的入口如下。

图4
分别有 1000ms 周期的函数、50ms 周期的函数、10ms 周期的函数、4ms 周期的函数以及 2ms 周期的函数。
整个遥控器的逻辑处理、数据交换的核心部分均在 Remoter 工作组内,该组内的代码框架如下图所示。

图5
其中的 DT.c 负责和飞控、上位机等的通信数据处理,即拆解包、封装包、提取关键数据等,如下图所示为对飞控传输过来的数据进行处理。




图6
其中 Stick.c 为摇杆逻辑处理,主要对摇杆采集到 ADC 值进行分析,判断需要执行的逻辑。最后的 cocobit.c 是负责和 cocobit 编程板之间的通信。
工作组“show”主要负责了整体的菜单 UI 显示,这里已经做了封装处理。
工作组“Driver”负责各个模块的底层驱动,例如摇杆 ADC 配置、NRF24L01
的 SPI 驱动等。
工作组“USB”以及“USB/Lib”,负责通过 STM32 自带的 USB,虚拟出串口,方便与上位机进行通信。
保存、编译最后把代码烧写的遥控中,配合飞控就可以正常使用了。如下图所示 1 为保存、2 为编译、3 为下载烧写。

图7
边栏推荐
猜你喜欢

随机推荐
如何快速对接淘宝开放平台API接口(淘宝店铺订单明文接口,淘宝店铺商品上传接口,淘宝店铺订单交易接口)
北路智控上市首日破发:公司市值59亿 募资15.6亿
十年架构五年生活-05第一次出差
js基础知识整理之 —— 五种输出方式
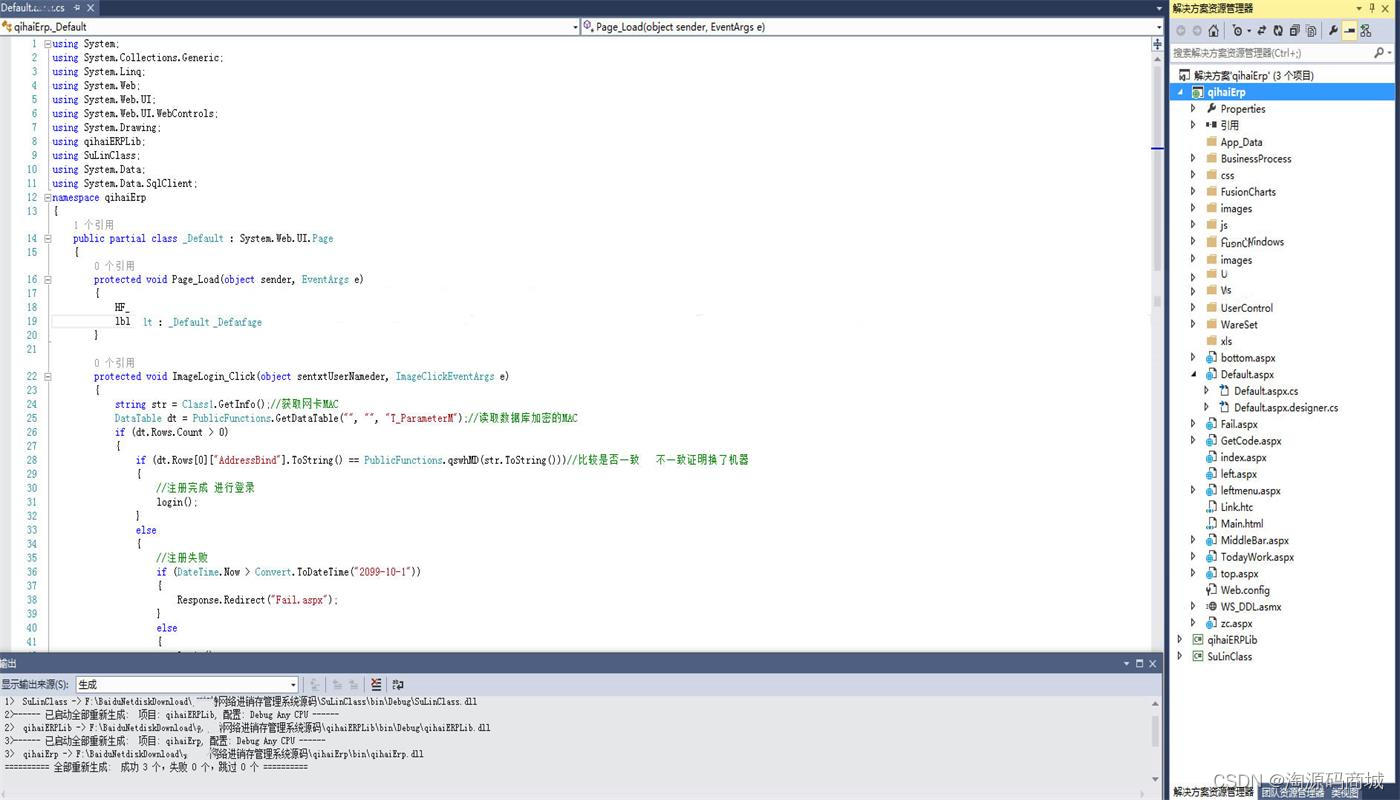
ASP.NET网络版进销存管理系统源码【源码免费分享】
matlab常微分方程在传染病建模中的应用
Teach you to locate online MySQL slow query problem hand by hand, package teaching package meeting
fifa将采用半自动越位技术计算进球
4、Citrix MCS云桌面无法安装todesk等软件
机器学习-特征映射方法
我为什么又能面试一次就拿到offer
一文读懂 Web 3.0 应用架构
别再到处乱放配置文件了!我司使用 7 年的这套解决方案,稳的一秕
【TypeScript笔记】01 - TS初体验 && TS常用类型
最近公共祖先(LCA)学习笔记 | P3379 【模板】最近公共祖先(LCA)题解
【软考 系统架构设计师】软件架构设计① 软件架构的概念
【Autosar RTM】
TensorFlow学习记录(一):基本介绍
5、Citrix云桌面初始化Storefront设置
Connect the Snowflake of CKAN tutorial CKAN to release to open data portal