当前位置:网站首页>Lesson 2 getting to know slam for the first time
Lesson 2 getting to know slam for the first time
2022-07-26 05:16:00 【oyou-2021】
ch02 First time to know SLAM
Classic vision SLAM frame

Vision SLAM The process includes the following steps :
Sensor information reading : In vision SLAM Mainly for the camera image information reading and preprocessing . If it's in a robot , There may also be a code disk 、 Reading and synchronization of information such as inertial sensors .
Visual Odometry (Visual Odometry,VO): The task of visual odometer is to estimate the motion of camera between adjacent images , And the local map .VO Also known as the front end (Front End).
The visual odometer will inevitably have cumulative drift (Accumulating Drift) problem .
Back end optimization (Optimization): The back end receives the camera pose measured by the visual odometer at different times , And loop back detection information , From noisy data , Optimize them , Get globally consistent trajectories and maps . Because of the connection VO after , Also known as the back end (Back End).
In the early stage EKF As a representative , Now take graph optimization as a representative .
In vision SLAM in , The front end is more relevant to the field of computer vision , For example, image feature extraction and matching , The back end is mainly filter and nonlinear optimization algorithm .
Loop back detection (Loop Closing): Loop detection determines whether the robot has reached the previous position . If a loopback is detected , It will provide information to the back end for processing .
Drawing (Mapping): It's based on the estimated trajectory , Create a map corresponding to the task requirements .
The form of map includes measurement map ( Accurately represent the positional relationship of map objects ) And topology map ( More emphasis on the relationship between map elements
system ) Two kinds of . There are also sparse maps and dense maps .
SLAM The mathematical representation of the problem
“ The radish carries the sensor and moves in the environment ”, Described by the following two things :
What is sports ? We should consider from k − 1 k-1k−1 Moment to k kk moment , Location of radish x xx How it changed .
Equation of motion :

What is observation ? Suppose the radish is in k kk Moment in x_k A signpost was detected at y_j , We have to think about how this is described in mathematical language .
The observation equation :
These two equations describe the most basic SLAM problem : When you know the reading of motion measurement u , And sensor readings z when , How to solve the positioning problem ( It is estimated that x ) And drawing problems ( It is estimated that y)? At this time , We will take SLAM The problem is modeled as a State estimation problem : How to pass the measurement data with noise , Estimate internal 、 Hidden state variables ?
《 Vision SLAM Fourteen speak 》 Notes extract _ncepu_Chen The blog of -CSDN Blog
边栏推荐
- npm操作指令
- C语言函数
- Unity scene jump script
- 【Leetcode】493. Reverse Pairs
- 手把手教你用代码实现SSO单点登录
- Nacos registry
- Embedded sharing collection 21
- Bash shortcut key to improve command line efficiency [Full Version]
- How to reproduce the official course of yolov5 gracefully (II) -- Mark and train your own data set
- [acwing] 2983. Toys
猜你喜欢

使用Ansible中的playbook

Leetcode linked list problem - 206. reverse linked list (learn linked list by one question and one article)

Seata submits at details in two stages

NetCore MySql The user specified as a definer (‘admin‘@‘%‘) does not exist
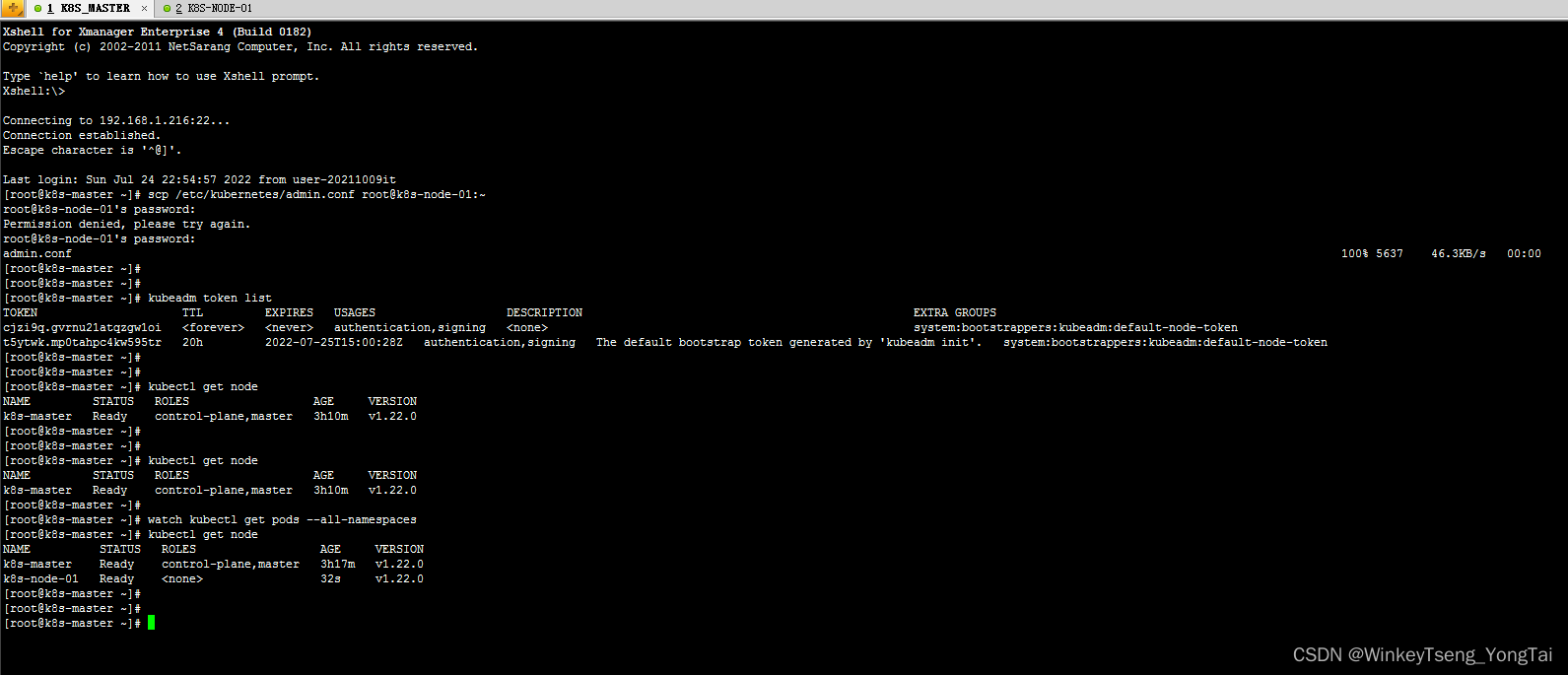
kubernetes install completed

OD-Paper【1】:Rich feature hierarchies for accurate object detection and semantic segmentation
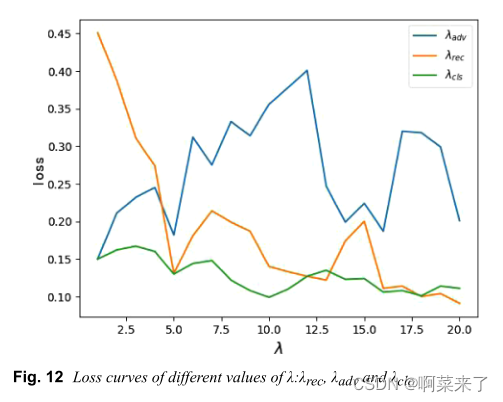
Chinese character style transfer --- learn the conversion and generation of one to many programmed Chinese characters through generation confrontation network
An online accident, I suddenly realized the essence of asynchrony

Trend of the times - the rise of cloud native databases
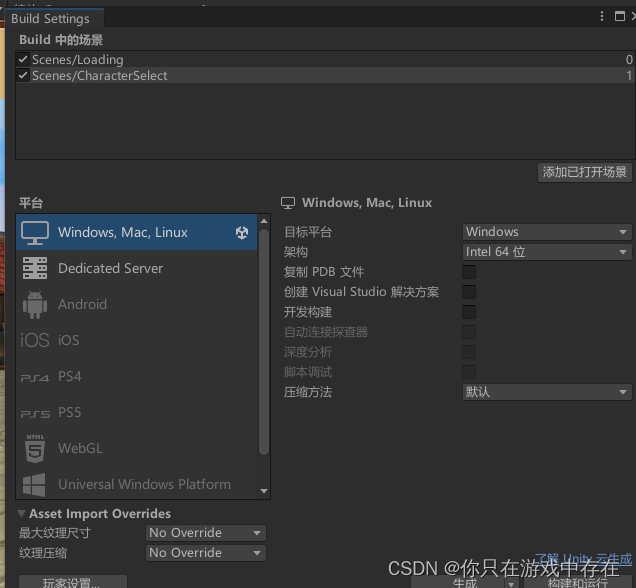
unity场景跳转脚本
随机推荐
一次线上事故,我顿悟了异步的精髓
Embedded sharing collection 21
JVM Lecture 2: class loading mechanism
ALV报表流程图解
C语言详解系列——函数的认识(3)形参,实参,嵌套调用和链式访问
Redis过期删除策略和内存淘汰策略
Seata submits at details in two stages
开发转测试:从零开始的6年自动化之路
C语言-指针进阶
Chinese character style transfer --- learn the conversion and generation of one to many programmed Chinese characters through generation confrontation network
Migrate the server and reconfigure the database (the database has no monitoring, and the monitoring starts with tns-12545, tns-12560, tns-00515 errors)
pillow的原因ImportError: cannot import name ‘PILLOW_VERSION‘ from ‘PIL‘,如何安装pillow<7.0.0
SSTI-payload和各种绕过方法
Go-Excelize API源码阅读(六)—— DeleteSheet(sheet string)
Common solutions for distributed ID - take one
Embedded sharing collection 20
Annotation @autowired how to assemble automatically
Reason for pilot importerror: cannot import name 'pilot_ Version 'from' PIL ', how to install pilot < 7.0.0
ABAP grammar learning (ALV)
I talked with the interviewer about MySQL optimization in five dimensions