当前位置:网站首页>IMU learning records
IMU learning records
2022-06-12 15:01:00 【From spring to winter】
IMU A record of learning
List of articles
One 、IMU Brief introduction
1.IMU principle
When we get home at night , When the power failure is found at home , When the eyes can't see anything in the dark , Only based on your own experience , Take small steps with extreme caution , And keep touching things around with your hands ( For example, refrigerator. ), To determine where you are .
IMU The principle of is very similar to taking small steps in the dark . In the dark , Because of the error between the estimation of the step size and the actual distance , When you take more and more steps , The difference between the estimated position and the actual position will be farther and farther . As shown in the figure below :

When taking the first step , estimated position ( Where blacks are ) And the actual location ( Where the white man is ) It is quite close to ; But as the number of steps increases , The difference between the estimated position and the actual position is becoming larger and larger . The little man in the picture only moves in one direction , It's one-dimensional . According to this method, it is extended to three-dimensional , Is the principle of the inertial measurement unit .
Academic language is : Based on Newton's laws of Mechanics , By measuring the acceleration of the carrier in the inertial reference system , Integrate it with time , And transform it into the navigation coordinate system , You can get the speed in the navigation coordinate system 、 Information such as yaw angle and position .
2.GPS+IMU
In driverless systems ,GPS The update frequency of is generally 10Hz,IMU The update frequency of is generally 100Hz.
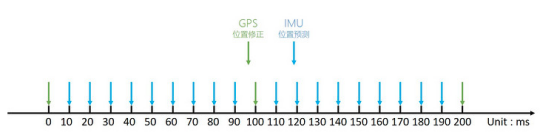
When two sensors work together , The frequency can be given 100Hz Positioning output of . The following figure is the schematic diagram of two sensor data fusion :
The information processing flow of the software running on the controller is similar to the following figure in terms of time dimension . stay 0~100ms In the cycle of , Use IMU Conduct 9 Estimation of secondary position , Wait for the new GPS When positioning data comes in , Then make corrections , In this way, high-frequency positioning result output can be realized .
Two 、IMU information acquisition
1.xsense_driver

Tips
[ERROR] [1551165884.109790]: Fatal: could not find proper MT device
Run the command :
sudo chmod 777 /dev/ttyUSB0 // Assign permissions to the serial port ,USB Transfer to serial port authorization command
Really not line USB Plug and unplug the port several times , At least that's what I did .
2.rostopic list

3.rostopic


imu data type :
The message header / Four yuan number / Quaternion residual / angular velocity / Angular velocity residual / Linear velocity / Linear velocity residual
4. Quaternion to Euler angle
imu There is no Euler angle in the output information , For the convenience of observation, I wrote one end of the code , Quaternion to Euler angle .
Can be used directly ROS Function of quaternion to Euler angle in
The code is as follows :
#include "ros/ros.h"
#include "geometry_msgs/Vector3.h"
#include "sensor_msgs/Imu.h"
#include "geometry_msgs/Quaternion.h"
#include "tf/transform_datatypes.h"
ros::Publisher rpy_publisher;
ros::Subscriber quat_subscriber;
void MsgCallback(const sensor_msgs::Imu msg)
{
tf::Quaternion quat;
quat = tf::Quaternion(msg.orientation.x,msg.orientation.y,msg.orientation.z,msg.orientation.w);
// the tf::Quaternion has a method to acess roll pitch and yaw
double roll, pitch, yaw;
tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
// the found angles are written in a geometry_msgs::Vector3
geometry_msgs::Vector3 rpy;
rpy.x = roll;
rpy.y = pitch;
rpy.z = yaw;
// this Vector is then published:
rpy_publisher.publish(rpy);
ROS_INFO("published rpy angles: roll=%f pitch=%f yaw=%f", rpy.x, rpy.y, rpy.z);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
rpy_publisher = n.advertise<geometry_msgs::Vector3>("rpy_angles", 1000);
quat_subscriber = n.subscribe("/imu/data", 1000, MsgCallback);
ROS_INFO("waiting for quaternion");
ros::spin();
return 0;
}
The Euler angle data are as follows :

4. function rqt
Because of the rotation on the plane , So only around Z Axis data changes , The other two axes are zero .

5. function rviz
Need to load :rviz_imu_plugin
This is a display sensor_msgs::Imu News rviz plug-in unit
adopt rviz You can display the pose at this time , But the change of displacement cannot be observed 
summary
This is the first blog , The learning process may also need a lot of summary , In the future, this will be a place to summarize !
边栏推荐
猜你喜欢

SQL cross database injection

TC menu split

JUnit test suite method sorting (method 2 is not easy to use)

Getting started with webdriver
左对齐,右对齐,随机数,goto,比较输出bool

h3c GR5200路由器上如何设置公网ip可以访问

Kinect2.0+ORBSLAM2_with_pointcloud_map

MH32F103ARPT6软硬件兼容替代STM32F103RCT6
![[LDA] LDA theme model notes - mainly Dirichlet](/img/e0/bc96b141aa577106379fab63d9df40.png)
[LDA] LDA theme model notes - mainly Dirichlet
Mh32f103arpt6 hardware and software compatible alternative to stm32f103rct6
随机推荐
程序构造和解释之过程抽象
机器人前行、旋转的service编写
Junit多线程的写法
Industrial end: a new battlefield of 618
Thinking: what is asynchrony and thread safety
Alibaba, Tencent et pingduo sont à la recherche d'une nouvelle logique pour l'Internet industriel
Qiming cloud sharing | demonstrate the switch through an example of the matter protocol to control the light on and off through the matter protocol
NETCORE combined with cap event bus to realize distributed transaction -- Introduction (1)
[writeup]buu SQL course1[entry level]
Learning is an inhumane thing (becoming an expert's internal mind skill)
产业端:618的新战场
Function related matters
【Environment】1. Get the configuration in YML through the environment in the configuration class
MySQL index and view
Qiming Zhixian shares the application scheme of 2.8-inch handheld central control screen
h3c GR5200路由器上如何设置公网ip可以访问
【LocalDate LocalTime LocalDateTime】1. Using immutability to achieve thread safety 2 Current date, current time, current date time 3 Since the time zone is not considered, you need to add 8 hours to th
Energy chain smart electronics landed on NASDAQ: Bain is the shareholder to become the first share of charging services in China
PTA:自测-3 数组元素循环右移问题 (20分)
MAT的安装和使用