当前位置:网站首页>AI chief architect 12 AICA industrial landing analysis under the industrial production process optimization scenario
AI chief architect 12 AICA industrial landing analysis under the industrial production process optimization scenario
2022-07-25 22:57:00 【The mountain of ignorance, the valley of despair, the slope of 】
0 Introduce




big data 
Industrial Internet planning 2015-2025 Made in China 2025
Development path , Traditional manufacturing 》 Digitization 》 Networking 》 Intelligent 
big data 》 Data intelligence 》 Industrial Internet 
Big industrial data 
Industrial data intelligence , Next big data plus AI, Above Intelligent Manufacturing , Industrial Internet 
equipment 》 process 》 Dispatch 》 Enterprise operation management 
Data intelligence process paradigm 
Baidu industrial intelligent model platform 
边栏推荐
- QT log file system
- 第二周学习:卷积神经网络
- 721. 账户合并 ●●、并查集
- Examples and points for attention about the use of getchar and scanf
- How painful is it to write unit tests?
- Oracle query statement summary
- Use of qvariant
- 每周推荐短视频:需要协同的智能设备越来越多,给物联网开发提出更大挑战?
- ribbon 执行逻辑源码解析
- Kibana~ the process number cannot be found after kibana is started in the background
猜你喜欢

CMU AI PhD 第一年总结
![[literature reading] - HRL -[hrl with universal policies for multi step robotic control]](/img/34/06d5ba3af4e6e775a335324c020161.png)
[literature reading] - HRL -[hrl with universal policies for multi step robotic control]
![[natural language processing] [vector representation] augsbert: improve the data enhancement method of Bi encoders for paired sentence scoring tasks](/img/9a/9bb00abf7804d61d3408143e5e4bda.png)
[natural language processing] [vector representation] augsbert: improve the data enhancement method of Bi encoders for paired sentence scoring tasks

DOM event object
![[paper notes] robot dynamic tracking and grasping method based on online prediction and planning](/img/0f/ca7f3cd3332069185a2dad397766b4.png)
[paper notes] robot dynamic tracking and grasping method based on online prediction and planning
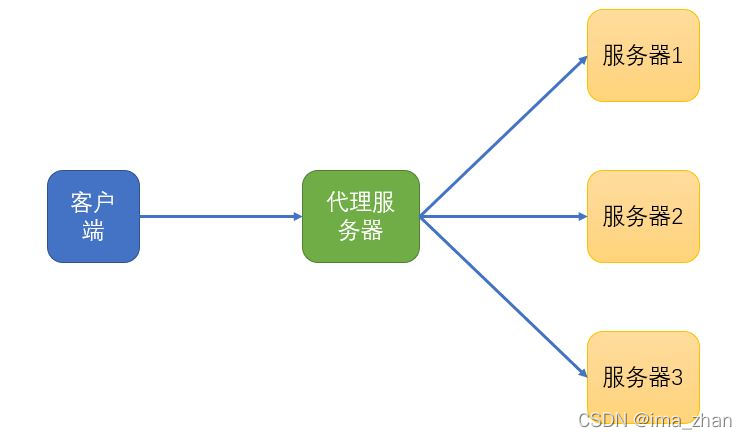
Understanding of forward proxy and reverse proxy

Recyclerview computehorizontalscrollextend computehorizontalscrollrange computehorizontalscroll for calculating the sliding distance

DHCP first static experiment
![[training day15] boring [tree DP]](/img/78/dc80076bb9fc4cf008c51b00ece431.png)
[training day15] boring [tree DP]
![[training day15] paint road [minimum spanning tree]](/img/12/2d4ad1e2b8133b6c92875faa4b4182.png)
[training day15] paint road [minimum spanning tree]
随机推荐
Qtreewidget control of QT
The difference between "= =" and equals
Simple setting method of search box
The fourth experiment nat
码蹄集 精准弹幕
Experiment 1, experiment 2 and Experiment 3 of assembly language and microcomputer principle: branch program design / loop program design / subroutine design
Basic knowledge of radar
Network Security Learning (XIII) data link layer
Design of regular expressions
Compiler introduction
MatrixCube揭秘102——300行实现的完整分布式存储系统MatrixKV
Mocha test
Examples and points for attention about the use of getchar and scanf
MySQL data type
Force deduction solution summary 919 complete binary tree inserter
Extended configuration of static routing in the second experiment
【论文笔记】A Meta-Reinforcement Learning Algorithm for Causal Discovery
校验码生成
贴片微型滚珠振动开关的结构原理
Qt的TQTreeWidget控件