当前位置:网站首页>ROS file system and related commands
ROS file system and related commands
2022-08-02 08:03:00 【Abbaaccording】
Level 1: catkin_workspace
Level 2: src build devel
The third level (under the src directory): package1 package2
Level 4: CmakeLists.txt package.xml scripts msg srv include src launch
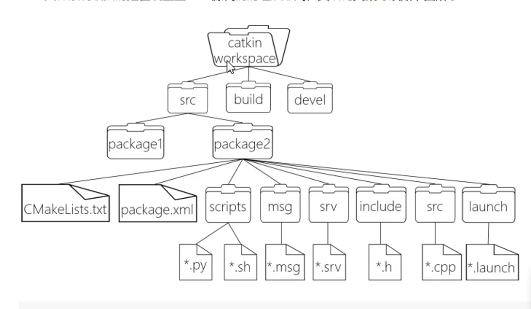
build: Compilation space, used to store CMake and catkin cache information, configuration information and other intermediate files
devel: The development space is used to store the object files generated after compilation, including header files, dynamic and static link libraries, executable files, etc.
src:Source space
Execute command 1 2 3
1. roscore
roscore is a collection of ros system prerequisite nodes and programs, roscore must be running for ROS nodes to communicate
Starting roscore is equivalent to starting ros master ros parameter server rosout log node
2. rosrun
rosrun toolkit name executable
Example: rosrun turtlesim turtlesim_node
3. roslaunch
Example: roslaunch toolkit name launch file name
4. Build
catkin_create_pkg custom package name dependency package -> create a new ROS function package
5, delete
sudo apt purge xxx -> delete a feature package
6, check
rospack list ->List all function packs
rospack find package name ->Query whether a function package exists, if so, return the installation path
roscd package name -> enter a package
rosls package name ->list files under a package
apt search xxx ->Search for a feature package
7, change
rosed package name file name ->modify the function package file
need to install vim
Example: rosed turtlesim Color.msg
边栏推荐
- 2022-2023 十大应用开发趋势
- MySQL-底层设置
- UG NX二次开发(C#)-外部模式-导出dwg格式的文件
- typescript学习
- Link with Game Glitch
- (2022牛客多校五)C-Bit Transmission(思维)
- 我与csdn
- 以训辅教,以战促学 | 新版攻防世界平台正式上线运营!
- Enterprise training and reproduction guidebook - training and reasoning of the OpenPose model based on Huawei ModelArts platform, realizing the recognition of two behaviors of climbing and climbing ov
- Comprehensive experiment of MPLS and BGP
猜你喜欢





随机推荐
FormData上传二进制文件、对象、对象数组
Splunk Filed extraction 字段截取
Introduction to mysql operation (4) ----- data sorting (ascending, descending, multi-field sorting)
OC-NSString
MySQL-索引优化和查询优化
数据中台:始于阿里,兴于DaaS
OC-NSNumber and NSValue are generally used for boxing and unboxing
MySQL-锁机制
MySQL-底层设置
MySQL-索引详解
About the SQL concat () function problem, how to splice
ROS文件系统以及相关命令
Buried development process
【Network】IP, subnet mask
敏捷、DevOps和嵌入式系统测试
Understand Chisel language. 31. Chisel advanced communication state machine (3) - Ready-Valid interface: definition, timing and implementation in Chisel
(2022牛客多校五)B-Watches(二分)
以训辅教,以战促学 | 新版攻防世界平台正式上线运营!
OC-NSDictionary
图腾柱和推挽电路介绍