当前位置:网站首页>Ego planner code parsing Bspline_ Optimizer section (3)
Ego planner code parsing Bspline_ Optimizer section (3)
2022-07-03 19:00:00 【X uuuer.】
1、 int BsplineOptimizer::earlyExit(void *func_data, const double *x, const double *g, const double fx, const double xnorm, const double gnorm, const double step, int n, int k, int ls)
// If force_stop_type_ Not for DONT_STOP Just go back to true, Otherwise return to false.
int BsplineOptimizer::earlyExit(void *func_data, const double *x, const double *g, const double fx, const double xnorm, const double gnorm, const double step, int n, int k, int ls)
{
BsplineOptimizer *opt = reinterpret_cast<BsplineOptimizer *>(func_data);
// cout << "k=" << k << endl;
// cout << "opt->flag_continue_to_optimize_=" << opt->flag_continue_to_optimize_ << endl;
return (opt->force_stop_type_ == STOP_FOR_ERROR || opt->force_stop_type_ == STOP_FOR_REBOUND);
}
// If force_stop_type_ Not for DONT_STOP Just go back to true, Otherwise return to false.2、double BsplineOptimizer::costFunctionRebound(void *func_data, const double *x, double *grad, const int n)
// call combineCostRebound(x,grad,cost,n) return cost cost .
double BsplineOptimizer::costFunctionRebound(void *func_data, const double *x, double *grad, const int n)
{
BsplineOptimizer *opt = reinterpret_cast<BsplineOptimizer *>(func_data);
double cost;
opt->combineCostRebound(x, grad, cost, n);
opt->iter_num_ += 1;
return cost;
}
// call combineCostRebound(x,grad,cost,n) return cost.3、double BsplineOptimizer::costFunctionRefine(void *func_data, const double *x, double *grad, const int n)
// call combineCostRefine(x,grad,cost,n) Return the weighted cost cost
double BsplineOptimizer::costFunctionRefine(void *func_data, const double *x, double *grad, const int n)
{
BsplineOptimizer *opt = reinterpret_cast<BsplineOptimizer *>(func_data);
double cost;
opt->combineCostRefine(x, grad, cost, n);
opt->iter_num_ += 1;
return cost;
}
// call combineCostRefine(x,grad,cost,n) return cost4、void BsplineOptimizer::calcDistanceCostRebound(const Eigen::MatrixXd &q, double &cost,
Eigen::MatrixXd &gradient, int iter_num, double smoothness_cost)
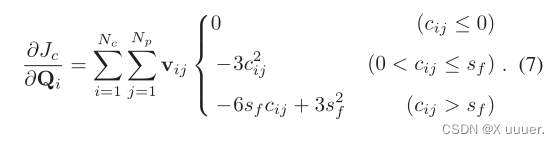
// Calculate the collision penalty , In the paper Collision Penalty Partial formula (5)(6)(7)
void BsplineOptimizer::calcDistanceCostRebound(const Eigen::MatrixXd &q, double &cost,
Eigen::MatrixXd &gradient, int iter_num, double smoothness_cost)
// Calculate the collision penalty , In the paper Collision Penalty Partial formula (5)(6)(7)
{
cost = 0.0;// cost
int end_idx = q.cols() - order_;// Last index
double demarcation = cps_.clearance;// Safety distance of control point sf
double a = 3 * demarcation, b = -3 * pow(demarcation, 2), c = pow(demarcation, 3);
//a=3 Times the safe distance
//b=-3*sf The square of
//c=sf The square of
force_stop_type_ = DONT_STOP;// Stop reason
if (iter_num > 3 && smoothness_cost / (cps_.size - 2 * order_) < 0.1)
// 0.1 is an experimental value that indicates the trajectory is smooth enough.
//0.1 It's an experimental value , Indicates that the trajectory is smooth enough .
{
check_collision_and_rebound();// Check collision and corresponding trajectory pop-up
}
/*** calculate distance cost and gradient ***/
// Calculate distance cost and gradient
for (auto i = order_; i < end_idx; ++i)// Traverse the control point
{
for (size_t j = 0; j < cps_.direction[i].size(); ++j)// Traverse all base points
{
double dist = (cps_.points.col(i) - cps_.base_point[i][j]).dot(cps_.direction[i][j]);
// distance =( The first i Control points - The first i The number corresponding to the first control point j BPS ( That is, from the control point to j Distance between obstacles ))* The direction vector of this direction
double dist_err = cps_.clearance - dist,;
// A safe distance from - distance , Corresponding to cij, namely cij=sf-dij
Eigen::Vector3d dist_grad = cps_.direction[i][j];// The distance gradient is i The first control point corresponds to the j Direction of basis points
if (dist_err < 0)// If cij <0
{
/* do nothing */
}
else if (dist_err < demarcation)// If cij Less than the safe distance (0<cij<sf)
{
cost += pow(dist_err, 3);// The cost is cij The third power of
gradient.col(i) += -3.0 * dist_err * dist_err * dist_grad;
// The gradient of this control point is = Gradient of control point +(-3*cij*cij* Gradient direction ), Corresponding to the second formula for calculating the gradient in the paper
}
else// If cij>sf, The distance between the control point and the obstacle is less than the safe distance
{
cost += a * dist_err * dist_err + b * dist_err + c;
// cost = cost +a*cij*cij+b*cij+c, among ,a=3 Times sf,b=-3*sf The square of ,c=sf The square of
gradient.col(i) += -(2.0 * a * dist_err + b) * dist_grad;
// The gradient of this control point is = Gradient of control point -(2.0 * a * cij + b) * Gradient direction
}
}
}
}
// Calculate the collision penalty , In the paper Collision Penalty Partial formula (5)(6)(7)
5、void BsplineOptimizer::calcFitnessCost(const Eigen::MatrixXd &q, double &cost, Eigen::MatrixXd &gradient)
// Calculate the cost of adaptation
void BsplineOptimizer::calcFitnessCost(const Eigen::MatrixXd &q, double &cost, Eigen::MatrixXd &gradient)
// Calculate the cost of adaptation
{
cost = 0.0;// The cost is 0
int end_idx = q.cols() - order_;
// def: f = |x*v|^2/a^2 + |x×v|^2/b^2
double a2 = 25, b2 = 1;
for (auto i = order_ - 1; i < end_idx + 1; ++i)
{
Eigen::Vector3d x = (q.col(i - 1) + 4 * q.col(i) + q.col(i + 1)) / 6.0 - ref_pts_[i - 1];
Eigen::Vector3d v = (ref_pts_[i] - ref_pts_[i - 2]).normalized();
double xdotv = x.dot(v);
Eigen::Vector3d xcrossv = x.cross(v);
double f = pow((xdotv), 2) / a2 + pow(xcrossv.norm(), 2) / b2;
cost += f;
Eigen::Matrix3d m;
m << 0, -v(2), v(1), v(2), 0, -v(0), -v(1), v(0), 0;
Eigen::Vector3d df_dx = 2 * xdotv / a2 * v + 2 / b2 * m * xcrossv;
gradient.col(i - 1) += df_dx / 6;
gradient.col(i) += 4 * df_dx / 6;
gradient.col(i + 1) += df_dx / 6;
}
}6、void BsplineOptimizer::calcSmoothnessCost(const Eigen::MatrixXd &q, double &cost,
Eigen::MatrixXd &gradient, bool falg_use_jerk /* = true*/)
// Calculate the smoothing cost , In the paper Smoothness Penalty Partial formula (4)
void BsplineOptimizer::calcSmoothnessCost(const Eigen::MatrixXd &q, double &cost,
Eigen::MatrixXd &gradient, bool falg_use_jerk /* = true*/)
// Calculate the smoothing cost , In the paper Smoothness Penalty Partial formula (4)
{
cost = 0.0;
if (falg_use_jerk)// Speed up
{
Eigen::Vector3d jerk, temp_j;
for (int i = 0; i < q.cols() - 3; i++)//i=0 To Nc-2
{
/* evaluate jerk */
jerk = q.col(i + 3) - 3 * q.col(i + 2) + 3 * q.col(i + 1) - q.col(i);
// Calculate the acceleration
cost += jerk.squaredNorm();// Add up
temp_j = 2.0 * jerk;
/* jerk gradient */// Add velocity gradient
gradient.col(i + 0) += -temp_j;
gradient.col(i + 1) += 3.0 * temp_j;
gradient.col(i + 2) += -3.0 * temp_j;
gradient.col(i + 3) += temp_j;
}
}
else
{
Eigen::Vector3d acc, temp_acc;// The acceleration
for (int i = 0; i < q.cols() - 2; i++)//i=0 To Nc-1
{
/* evaluate acc */
acc = q.col(i + 2) - 2 * q.col(i + 1) + q.col(i);
cost += acc.squaredNorm();// Add up
temp_acc = 2.0 * acc;
/* acc gradient */// Acceleration gradient
gradient.col(i + 0) += temp_acc;
gradient.col(i + 1) += -2.0 * temp_acc;
gradient.col(i + 2) += temp_acc;
}
}
}
7、 void BsplineOptimizer::calcFeasibilityCost(const Eigen::MatrixXd &q, double &cost,
Eigen::MatrixXd &gradient)
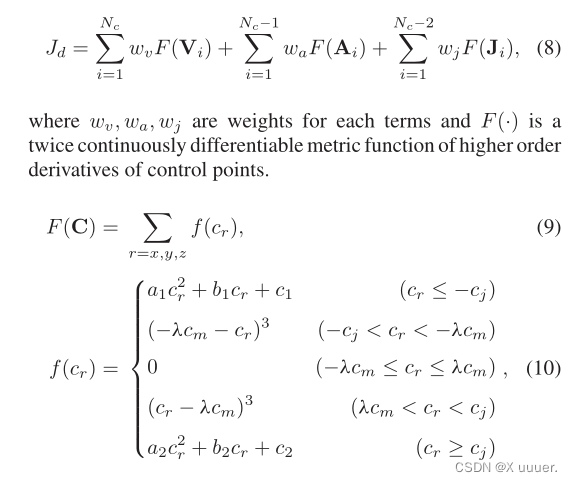
// Calculate the feasibility cost , In the paper Feasibility Penalty Partial formula (8)(9)(10)
// The feasibility is ensured by limiting the higher derivative of the trajectory in each dimension
void BsplineOptimizer::calcFeasibilityCost(const Eigen::MatrixXd &q, double &cost,
Eigen::MatrixXd &gradient)
// Calculate the feasibility cost , In the paper Feasibility Penalty Partial formula (8)(9)(10)
// The feasibility is ensured by limiting the higher derivative of the trajectory in each dimension
{
//#define SECOND_DERIVATIVE_CONTINOUS, The second derivative is continuous
#ifdef SECOND_DERIVATIVE_CONTINOUS
cost = 0.0;
double demarcation = 1.0; // 1m/s, 1m/s/s Safe range
double ar = 3 * demarcation, br = -3 * pow(demarcation, 2), cr = pow(demarcation, 3);
double al = ar, bl = -br, cl = cr;
/* abbreviation */
double ts, ts_inv2, ts_inv3;
ts = bspline_interval_;//ts by b Spline interval
ts_inv2 = 1 / ts / ts;// The acceleration
ts_inv3 = 1 / ts / ts / ts;// Speed up
/* velocity feasibility */
// Speed feasibility
for (int i = 0; i < q.cols() - 1; i++)
{
Eigen::Vector3d vi = (q.col(i + 1) - q.col(i)) / ts;
// The speed is the last control point - Divide the previous control point by time ts
for (int j = 0; j < 3; j++)
{
if (vi(j) > max_vel_ + demarcation)// If the speed is greater than the maximum speed + Safe speed 1m/s
{
double diff = vi(j) - max_vel_;// The difference is the current speed - Maximum speed
cost += (ar * diff * diff + br * diff + cr) * ts_inv3; // cost
// multiply ts_inv3 to make vel and acc has similar magnitude
// multiply ts_inv3, send vel and acc With similar amplitude
double grad = (2.0 * ar * diff + br) / ts * ts_inv3;// Calculate the gradient
gradient(j, i + 0) += -grad;
gradient(j, i + 1) += grad;
}
else if (vi(j) > max_vel_)// If the speed is greater than the maximum speed
{
double diff = vi(j) - max_vel_;
cost += pow(diff, 3) * ts_inv3;
;
double grad = 3 * diff * diff / ts * ts_inv3;
;
gradient(j, i + 0) += -grad;
gradient(j, i + 1) += grad;
}
else if (vi(j) < -(max_vel_ + demarcation))
{
double diff = vi(j) + max_vel_;
cost += (al * diff * diff + bl * diff + cl) * ts_inv3;
double grad = (2.0 * al * diff + bl) / ts * ts_inv3;
gradient(j, i + 0) += -grad;
gradient(j, i + 1) += grad;
}
else if (vi(j) < -max_vel_)
{
double diff = vi(j) + max_vel_;
cost += -pow(diff, 3) * ts_inv3;
double grad = -3 * diff * diff / ts * ts_inv3;
gradient(j, i + 0) += -grad;
gradient(j, i + 1) += grad;
}
else
{
/* nothing happened */
}
}
}
/* acceleration feasibility */
// Acceleration feasibility
for (int i = 0; i < q.cols() - 2; i++)
{
Eigen::Vector3d ai = (q.col(i + 2) - 2 * q.col(i + 1) + q.col(i)) * ts_inv2;
// The acceleration =( The third control point -2* Second control point + Current control point )* 1 / ts / ts
for (int j = 0; j < 3; j++)
{
if (ai(j) > max_acc_ + demarcation)// angular velocity > Maximum acceleration + Safe acceleration 1m/s
{
double diff = ai(j) - max_acc_;
cost += ar * diff * diff + br * diff + cr;// Corresponding cost
double grad = (2.0 * ar * diff + br) * ts_inv2;
gradient(j, i + 0) += grad;
gradient(j, i + 1) += -2 * grad;
gradient(j, i + 2) += grad;
}
else if (ai(j) > max_acc_)
{
double diff = ai(j) - max_acc_;
cost += pow(diff, 3);
double grad = 3 * diff * diff * ts_inv2;
gradient(j, i + 0) += grad;
gradient(j, i + 1) += -2 * grad;
gradient(j, i + 2) += grad;
}
else if (ai(j) < -(max_acc_ + demarcation))
{
double diff = ai(j) + max_acc_;
cost += al * diff * diff + bl * diff + cl;
double grad = (2.0 * al * diff + bl) * ts_inv2;
gradient(j, i + 0) += grad;
gradient(j, i + 1) += -2 * grad;
gradient(j, i + 2) += grad;
}
else if (ai(j) < -max_acc_)
{
double diff = ai(j) + max_acc_;
cost += -pow(diff, 3);
double grad = -3 * diff * diff * ts_inv2;
gradient(j, i + 0) += grad;
gradient(j, i + 1) += -2 * grad;
gradient(j, i + 2) += grad;
}
else
{
/* nothing happened */
}
}
}
#else
cost = 0.0;
/* abbreviation */
double ts, /*vm2, am2, */ ts_inv2;
// vm2 = max_vel_ * max_vel_;
// am2 = max_acc_ * max_acc_;
ts = bspline_interval_;
ts_inv2 = 1 / ts / ts;
/* velocity feasibility */// Speed feasibility
for (int i = 0; i < q.cols() - 1; i++)//i=1 To Nc, In the paper Feasibility Penalty Partial formula (8)
{
Eigen::Vector3d vi = (q.col(i + 1) - q.col(i)) / ts;// Corresponding to the formula in the paper (2)
//cout << "temp_v * vi=" ;
for (int j = 0; j < 3; j++)//xyz Calculate the speed on the three axes respectively
{
if (vi(j) > max_vel_)// Speed on each axis > Maximum speed
{
// cout << "fuck VEL" << endl;
// cout << vi(j) << endl;
cost += pow(vi(j) - max_vel_, 2) * ts_inv2;// Cumulative slave i=1 To Nc, Calculation WvF(Vi)
// multiply ts_inv3 to make vel and acc has similar magnitude
// * ts_inv2 send vel and acc With similar amplitude , That is, multiply by a weight Wv
gradient(j, i + 0) += -2 * (vi(j) - max_vel_) / ts * ts_inv2;
gradient(j, i + 1) += 2 * (vi(j) - max_vel_) / ts * ts_inv2;
}
else if (vi(j) < -max_vel_)
{
cost += pow(vi(j) + max_vel_, 2) * ts_inv2;
gradient(j, i + 0) += -2 * (vi(j) + max_vel_) / ts * ts_inv2;
gradient(j, i + 1) += 2 * (vi(j) + max_vel_) / ts * ts_inv2;
}
else
{
/* code */
}
}
}
/* acceleration feasibility */
// Acceleration feasibility
for (int i = 0; i < q.cols() - 2; i++)//i=1 To Nc-1, In the paper Feasibility Penalty Partial formula (8)
{
Eigen::Vector3d ai = (q.col(i + 2) - 2 * q.col(i + 1) + q.col(i)) * ts_inv2;// Calculation speed
//cout << "temp_a * ai=" ;
for (int j = 0; j < 3; j++)// Calculation xyz Acceleration on each axis
{
if (ai(j) > max_acc_)// The acceleration > Maximum acceleration
{
// cout << "fuck ACC" << endl;
// cout << ai(j) << endl;
cost += pow(ai(j) - max_acc_, 2);// Cumulative slave i=1 To Nc-1, Calculation WaF(Ai)
gradient(j, i + 0) += 2 * (ai(j) - max_acc_) * ts_inv2;
gradient(j, i + 1) += -4 * (ai(j) - max_acc_) * ts_inv2;
gradient(j, i + 2) += 2 * (ai(j) - max_acc_) * ts_inv2;
}
else if (ai(j) < -max_acc_)
{
cost += pow(ai(j) + max_acc_, 2);
gradient(j, i + 0) += 2 * (ai(j) + max_acc_) * ts_inv2;
gradient(j, i + 1) += -4 * (ai(j) + max_acc_) * ts_inv2;
gradient(j, i + 2) += 2 * (ai(j) + max_acc_) * ts_inv2;
}
else
{
/* code */
}
}
//cout << endl;
}
#endif
}8、 bool BsplineOptimizer::check_collision_and_rebound(void)
// Judge whether it is necessary to check obstacles and eject tracks from obstacles , And calculation Pij Code out
bool BsplineOptimizer::check_collision_and_rebound(void)
// Judge whether it is necessary to check obstacles and eject tracks from obstacles , And calculation Pij The output code is consistent
{
int end_idx = cps_.size - order_;
/*** Check and segment the initial trajectory according to obstacles ***/
// Check and segment the initial trajectory according to the obstacles
int in_id, out_id;
vector<std::pair<int, int>> segment_ids;
bool flag_new_obs_valid = false;
int i_end = end_idx - (end_idx - order_) / 3;
for (int i = order_ - 1; i <= i_end; ++i)
{
bool occ = grid_map_->getInflateOccupancy(cps_.points.col(i));
/*** check if the new collision will be valid ***/
// Check whether the new obstacle is effective
if (occ)
{
for (size_t k = 0; k < cps_.direction[i].size(); ++k)
{
cout.precision(2);
if ((cps_.points.col(i) - cps_.base_point[i][k]).dot(cps_.direction[i][k]) < 1 * grid_map_->getResolution()) // current point is outside all the collision_points.
{
occ = false; // Not really takes effect, just for better hunman understanding.
break;
}
}
}
if (occ)
{
flag_new_obs_valid = true;
int j;
for (j = i - 1; j >= 0; --j)
{
occ = grid_map_->getInflateOccupancy(cps_.points.col(j));
if (!occ)
{
in_id = j;
break;
}
}
if (j < 0) // fail to get the obs free point, Can't get obs Idle point
{
ROS_ERROR("ERROR! the drone is in obstacle. This should not happen.");
in_id = 0;
}
for (j = i + 1; j < cps_.size; ++j)
{
occ = grid_map_->getInflateOccupancy(cps_.points.col(j));
if (!occ)
{
out_id = j;
break;
}
}
if (j >= cps_.size) // fail to get the obs free point
{
ROS_WARN("WARN! terminal point of the current trajectory is in obstacle, skip this planning.");
force_stop_type_ = STOP_FOR_ERROR;
return false;
}
i = j + 1;
segment_ids.push_back(std::pair<int, int>(in_id, out_id));
}
}
if (flag_new_obs_valid)
{
vector<vector<Eigen::Vector3d>> a_star_pathes;
for (size_t i = 0; i < segment_ids.size(); ++i)
{
/*** a star search ***/
Eigen::Vector3d in(cps_.points.col(segment_ids[i].first)), out(cps_.points.col(segment_ids[i].second));
if (a_star_->AstarSearch(/*(in-out).norm()/10+0.05*/ 0.1, in, out))
{
a_star_pathes.push_back(a_star_->getPath());
}
else
{
ROS_ERROR("a star error");
segment_ids.erase(segment_ids.begin() + i);
i--;
}
}
/*** Assign parameters to each segment ***/
for (size_t i = 0; i < segment_ids.size(); ++i)
{
// step 1
for (int j = segment_ids[i].first; j <= segment_ids[i].second; ++j)
cps_.flag_temp[j] = false;
// step 2
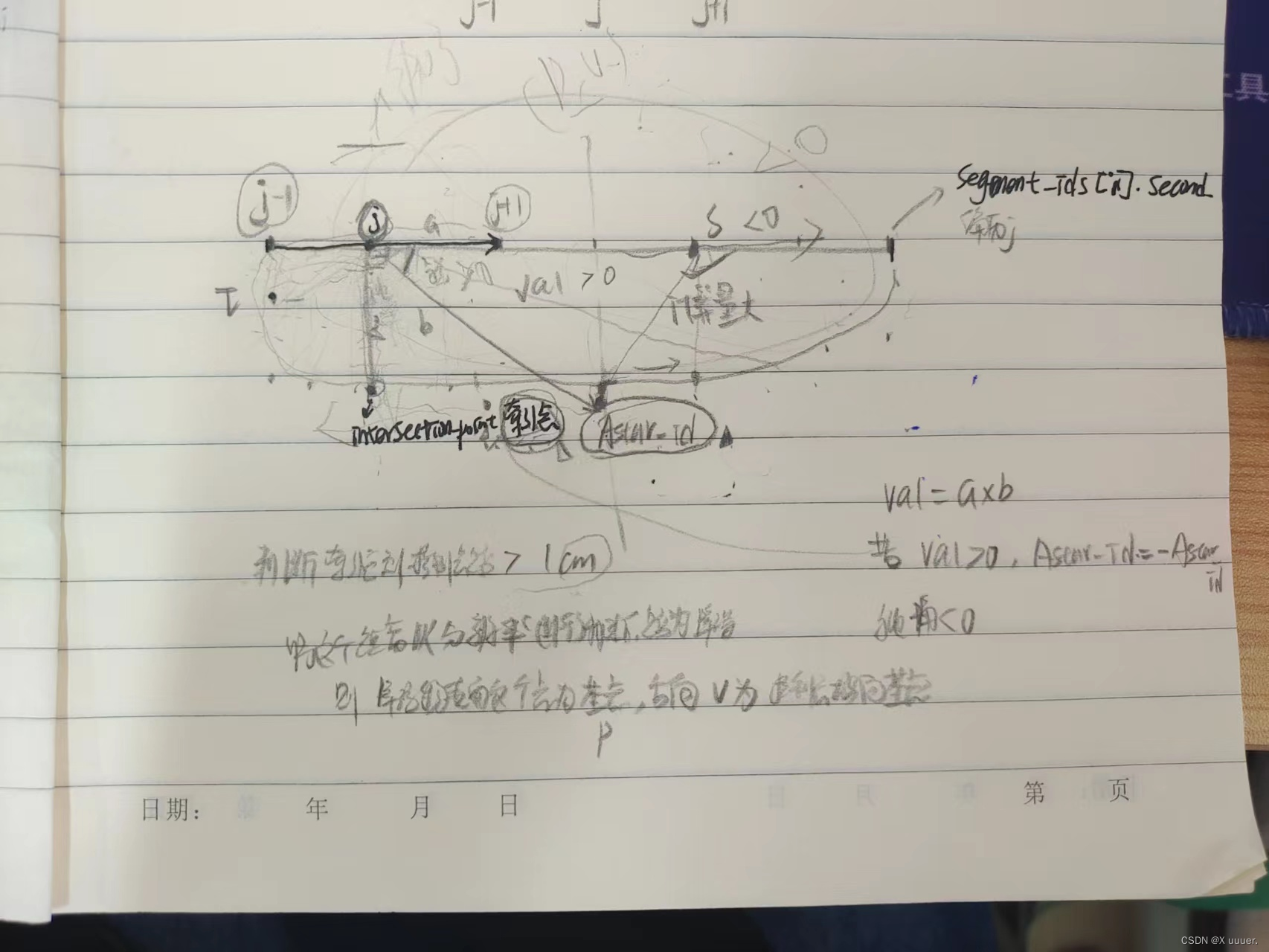
int got_intersection_id = -1;
for (int j = segment_ids[i].first + 1; j < segment_ids[i].second; ++j)
{
Eigen::Vector3d ctrl_pts_law(cps_.points.col(j + 1) - cps_.points.col(j - 1)), intersection_point;
int Astar_id = a_star_pathes[i].size() / 2, last_Astar_id; // Let "Astar_id = id_of_the_most_far_away_Astar_point" will be better, but it needs more computation
double val = (a_star_pathes[i][Astar_id] - cps_.points.col(j)).dot(ctrl_pts_law), last_val = val;
while (Astar_id >= 0 && Astar_id < (int)a_star_pathes[i].size())
{
last_Astar_id = Astar_id;
if (val >= 0)
--Astar_id;
else
++Astar_id;
val = (a_star_pathes[i][Astar_id] - cps_.points.col(j)).dot(ctrl_pts_law);
// cout << val << endl;
if (val * last_val <= 0 && (abs(val) > 0 || abs(last_val) > 0)) // val = last_val = 0.0 is not allowed
{
intersection_point =
a_star_pathes[i][Astar_id] +
((a_star_pathes[i][Astar_id] - a_star_pathes[i][last_Astar_id]) *
(ctrl_pts_law.dot(cps_.points.col(j) - a_star_pathes[i][Astar_id]) / ctrl_pts_law.dot(a_star_pathes[i][Astar_id] - a_star_pathes[i][last_Astar_id])) // = t
);
got_intersection_id = j;
break;
}
}
if (got_intersection_id >= 0)
{
cps_.flag_temp[j] = true;
double length = (intersection_point - cps_.points.col(j)).norm();
if (length > 1e-5)
{
for (double a = length; a >= 0.0; a -= grid_map_->getResolution())
{
bool occ = grid_map_->getInflateOccupancy((a / length) * intersection_point + (1 - a / length) * cps_.points.col(j));
if (occ || a < grid_map_->getResolution())
{
if (occ)
a += grid_map_->getResolution();
cps_.base_point[j].push_back((a / length) * intersection_point + (1 - a / length) * cps_.points.col(j));
cps_.direction[j].push_back((intersection_point - cps_.points.col(j)).normalized());
break;
}
}
}
else
{
got_intersection_id = -1;
}
}
}
//step 3
if (got_intersection_id >= 0)
{
for (int j = got_intersection_id + 1; j <= segment_ids[i].second; ++j)
if (!cps_.flag_temp[j])
{
cps_.base_point[j].push_back(cps_.base_point[j - 1].back());
cps_.direction[j].push_back(cps_.direction[j - 1].back());
}
for (int j = got_intersection_id - 1; j >= segment_ids[i].first; --j)
if (!cps_.flag_temp[j])
{
cps_.base_point[j].push_back(cps_.base_point[j + 1].back());
cps_.direction[j].push_back(cps_.direction[j + 1].back());
}
}
else
ROS_WARN("Failed to generate direction. It doesn't matter.");
}
force_stop_type_ = STOP_FOR_REBOUND;
return true;
}
return false;
}9、bool BsplineOptimizer::BsplineOptimizeTrajRebound(Eigen::MatrixXd &optimal_points, double ts)
//B Spline optimization trajectory , Push the track out of the obstacle , Get the optimal collision free trajectory
// Set the time interval t, call rebound_optimize() Push the track out of the obstacle , Get the optimal collision free trajectory , And assign its control point to optimal_points.
bool BsplineOptimizer::BsplineOptimizeTrajRebound(Eigen::MatrixXd &optimal_points, double ts)
//B Spline optimization trajectory , Push the track out of the obstacle , Get the optimal collision free trajectory
{
setBsplineInterval(ts);// Set up B Spline interval
bool flag_success = rebound_optimize();
optimal_points = cps_.points;
return flag_success;
// Set the time interval ts
// call rebound_optimize() Push the track out of the obstacle
// Get the optimal collision free trajectory , And assign its control point to optimal_points.
}
10、 bool BsplineOptimizer::BsplineOptimizeTrajRefine(const Eigen::MatrixXd &init_points, const double ts, Eigen::MatrixXd &optimal_points)
//B Spline optimization trajectory , Redistribute time , To the optimal dynamic feasible trajectory
// Set the initial control point init_points、 The time interval ts, call refine_optimize() Redistribute time , Get the optimal dynamic feasible trajectory , And assign its control point to optimal_points.
bool BsplineOptimizer::BsplineOptimizeTrajRefine(const Eigen::MatrixXd &init_points, const double ts, Eigen::MatrixXd &optimal_points)
//B Spline optimization trajectory , Redistribute time , To the optimal dynamic feasible trajectory
{
setControlPoints(init_points);
setBsplineInterval(ts);
bool flag_success = refine_optimize();
optimal_points = cps_.points;
return flag_success;
// Set the initial control point init_points、 The time interval ts
// call refine_optimize() Redistribute time
// Get the optimal dynamic feasible trajectory , And assign its control point to optimal_points
}
11、bool BsplineOptimizer::rebound_optimize()
// To optimize , Push the track out of the obstacle
// Use L-BFGS Methods to optimize the objective function , Get smooth 、 No collision 、 Dynamic feasible trajectory
bool BsplineOptimizer::rebound_optimize()
// To optimize , Push the track out of the obstacle
// Use L-BFGS Methods to optimize the objective function , Get smooth 、 No collision 、 Dynamic feasible trajectory
{
iter_num_ = 0;
int start_id = order_;
int end_id = this->cps_.size - order_;
variable_num_ = 3 * (end_id - start_id);
double final_cost;
ros::Time t0 = ros::Time::now(), t1, t2;
int restart_nums = 0, rebound_times = 0;
;
bool flag_force_return, flag_occ, success;
new_lambda2_ = lambda2_;
constexpr int MAX_RESART_NUMS_SET = 3;
do
{
/* ---------- prepare ---------- */
min_cost_ = std::numeric_limits<double>::max();
iter_num_ = 0;
flag_force_return = false;
flag_occ = false;
success = false;
double q[variable_num_];
memcpy(q, cps_.points.data() + 3 * start_id, variable_num_ * sizeof(q[0]));
lbfgs::lbfgs_parameter_t lbfgs_params;
lbfgs::lbfgs_load_default_parameters(&lbfgs_params);
lbfgs_params.mem_size = 16;
lbfgs_params.max_iterations = 200;
lbfgs_params.g_epsilon = 0.01;
/* ---------- optimize ---------- */
t1 = ros::Time::now();
int result = lbfgs::lbfgs_optimize(variable_num_, q, &final_cost, BsplineOptimizer::costFunctionRebound, NULL, BsplineOptimizer::earlyExit, this, &lbfgs_params);
t2 = ros::Time::now();
double time_ms = (t2 - t1).toSec() * 1000;
double total_time_ms = (t2 - t0).toSec() * 1000;
/* ---------- success temporary, check collision again ---------- */
if (result == lbfgs::LBFGS_CONVERGENCE ||
result == lbfgs::LBFGSERR_MAXIMUMITERATION ||
result == lbfgs::LBFGS_ALREADY_MINIMIZED ||
result == lbfgs::LBFGS_STOP)
{
//ROS_WARN("Solver error in planning!, return = %s", lbfgs::lbfgs_strerror(result));
flag_force_return = false;
UniformBspline traj = UniformBspline(cps_.points, 3, bspline_interval_);
double tm, tmp;
traj.getTimeSpan(tm, tmp);
double t_step = (tmp - tm) / ((traj.evaluateDeBoorT(tmp) - traj.evaluateDeBoorT(tm)).norm() / grid_map_->getResolution());
for (double t = tm; t < tmp * 2 / 3; t += t_step) // Only check the closest 2/3 partition of the whole trajectory.
{
flag_occ = grid_map_->getInflateOccupancy(traj.evaluateDeBoorT(t));
if (flag_occ)
{
//cout << "hit_obs, t=" << t << " P=" << traj.evaluateDeBoorT(t).transpose() << endl;
if (t <= bspline_interval_) // First 3 control points in obstacles!
{
cout << cps_.points.col(1).transpose() << "\n"
<< cps_.points.col(2).transpose() << "\n"
<< cps_.points.col(3).transpose() << "\n"
<< cps_.points.col(4).transpose() << endl;
ROS_WARN("First 3 control points in obstacles! return false, t=%f", t);
return false;
}
break;
}
}
if (!flag_occ)
{
printf("\033[32miter(+1)=%d,time(ms)=%5.3f,total_t(ms)=%5.3f,cost=%5.3f\n\033[0m", iter_num_, time_ms, total_time_ms, final_cost);
success = true;
}
else // restart
{
restart_nums++;
initControlPoints(cps_.points, false);
new_lambda2_ *= 2;
printf("\033[32miter(+1)=%d,time(ms)=%5.3f,keep optimizing\n\033[0m", iter_num_, time_ms);
}
}
else if (result == lbfgs::LBFGSERR_CANCELED)
{
flag_force_return = true;
rebound_times++;
cout << "iter=" << iter_num_ << ",time(ms)=" << time_ms << ",rebound." << endl;
}
else
{
ROS_WARN("Solver error. Return = %d, %s. Skip this planning.", result, lbfgs::lbfgs_strerror(result));
// while (ros::ok());
}
} while ((flag_occ && restart_nums < MAX_RESART_NUMS_SET) ||
(flag_force_return && force_stop_type_ == STOP_FOR_REBOUND && rebound_times <= 20));
return success;
}12、bool BsplineOptimizer::refine_optimize()
// To optimize the
// Use L-BFGS Methods to optimize the objective function , After getting reallocated time , smooth 、 Good fitting 、 Dynamic feasible trajectory .
bool BsplineOptimizer::refine_optimize()
// To optimize the
// Use L-BFGS Methods to optimize the objective function
// After getting reallocated time , smooth 、 Good fitting 、 Dynamic feasible trajectory .
{
iter_num_ = 0;
int start_id = order_;
int end_id = this->cps_.points.cols() - order_;
variable_num_ = 3 * (end_id - start_id);
double q[variable_num_];
double final_cost;
memcpy(q, cps_.points.data() + 3 * start_id, variable_num_ * sizeof(q[0]));
double origin_lambda4 = lambda4_;
bool flag_safe = true;
int iter_count = 0;
do
{
lbfgs::lbfgs_parameter_t lbfgs_params;
lbfgs::lbfgs_load_default_parameters(&lbfgs_params);
lbfgs_params.mem_size = 16;
lbfgs_params.max_iterations = 200;
lbfgs_params.g_epsilon = 0.001;
int result = lbfgs::lbfgs_optimize(variable_num_, q, &final_cost, BsplineOptimizer::costFunctionRefine, NULL, NULL, this, &lbfgs_params);
if (result == lbfgs::LBFGS_CONVERGENCE ||
result == lbfgs::LBFGSERR_MAXIMUMITERATION ||
result == lbfgs::LBFGS_ALREADY_MINIMIZED ||
result == lbfgs::LBFGS_STOP)
{
//pass
}
else
{
ROS_ERROR("Solver error in refining!, return = %d, %s", result, lbfgs::lbfgs_strerror(result));
}
UniformBspline traj = UniformBspline(cps_.points, 3, bspline_interval_);
double tm, tmp;
traj.getTimeSpan(tm, tmp);
double t_step = (tmp - tm) / ((traj.evaluateDeBoorT(tmp) - traj.evaluateDeBoorT(tm)).norm() / grid_map_->getResolution()); // Step size is defined as the maximum size that can passes throgth every gird.
for (double t = tm; t < tmp * 2 / 3; t += t_step)
{
if (grid_map_->getInflateOccupancy(traj.evaluateDeBoorT(t)))
{
// cout << "Refined traj hit_obs, t=" << t << " P=" << traj.evaluateDeBoorT(t).transpose() << endl;
Eigen::MatrixXd ref_pts(ref_pts_.size(), 3);
for (size_t i = 0; i < ref_pts_.size(); i++)
{
ref_pts.row(i) = ref_pts_[i].transpose();
}
flag_safe = false;
break;
}
}
if (!flag_safe)
lambda4_ *= 2;
iter_count++;
} while (!flag_safe && iter_count <= 0);
lambda4_ = origin_lambda4;
//cout << "iter_num_=" << iter_num_ << endl;
return flag_safe;
}13、void BsplineOptimizer::combineCostRebound(const double *x, double *grad, double &f_combine, const int n)
// Find the smooth term of the trajectory 、 Collision items 、 Weighted sum of feasible terms in dynamics f_combine And the direction of the gradient grad
void BsplineOptimizer::combineCostRebound(const double *x, double *grad, double &f_combine, const int n)
// Find the smooth term of the trajectory 、 Collision items 、 Weighted sum of feasible terms in dynamics f_combine And the direction of the gradient grad
{
memcpy(cps_.points.data() + 3 * order_, x, n * sizeof(x[0]));
/* ---------- evaluate cost and gradient ---------- */
double f_smoothness, f_distance, f_feasibility;
Eigen::MatrixXd g_smoothness = Eigen::MatrixXd::Zero(3, cps_.size);
Eigen::MatrixXd g_distance = Eigen::MatrixXd::Zero(3, cps_.size);
Eigen::MatrixXd g_feasibility = Eigen::MatrixXd::Zero(3, cps_.size);
calcSmoothnessCost(cps_.points, f_smoothness, g_smoothness);
calcDistanceCostRebound(cps_.points, f_distance, g_distance, iter_num_, f_smoothness);
calcFeasibilityCost(cps_.points, f_feasibility, g_feasibility);
f_combine = lambda1_ * f_smoothness + new_lambda2_ * f_distance + lambda3_ * f_feasibility;
//printf("origin %f %f %f %f\n", f_smoothness, f_distance, f_feasibility, f_combine);
Eigen::MatrixXd grad_3D = lambda1_ * g_smoothness + new_lambda2_ * g_distance + lambda3_ * g_feasibility;
memcpy(grad, grad_3D.data() + 3 * order_, n * sizeof(grad[0]));
}14、 void BsplineOptimizer::combineCostRefine(const double *x, double *grad, double &f_combine, const int n)
// Obtain the trajectory after extending the allocated time Smooth term of 、 Fitting term 、 Weighted sum of feasible terms in dynamics f_combine And the direction of the gradient grad
void BsplineOptimizer::combineCostRefine(const double *x, double *grad, double &f_combine, const int n)
// The smooth term of the trajectory after extending the allocated time is obtained 、 Fitting term 、 Weighted sum of feasible terms in dynamics f_combine And the direction of the gradient grad
{
memcpy(cps_.points.data() + 3 * order_, x, n * sizeof(x[0]));
/* ---------- evaluate cost and gradient ---------- */
double f_smoothness, f_fitness, f_feasibility;
Eigen::MatrixXd g_smoothness = Eigen::MatrixXd::Zero(3, cps_.points.cols());
Eigen::MatrixXd g_fitness = Eigen::MatrixXd::Zero(3, cps_.points.cols());
Eigen::MatrixXd g_feasibility = Eigen::MatrixXd::Zero(3, cps_.points.cols());
//time_satrt = ros::Time::now();
calcSmoothnessCost(cps_.points, f_smoothness, g_smoothness);
calcFitnessCost(cps_.points, f_fitness, g_fitness);
calcFeasibilityCost(cps_.points, f_feasibility, g_feasibility);
/* ---------- convert to solver format...---------- */
f_combine = lambda1_ * f_smoothness + lambda4_ * f_fitness + lambda3_ * f_feasibility;
// printf("origin %f %f %f %f\n", f_smoothness, f_fitness, f_feasibility, f_combine);
Eigen::MatrixXd grad_3D = lambda1_ * g_smoothness + lambda4_ * g_fitness + lambda3_ * g_feasibility;
memcpy(grad, grad_3D.data() + 3 * order_, n * sizeof(grad[0]));
}
} // namespace ego_plannerah It's not easy to finish it !!
边栏推荐
- Flask generates swagger documents
- Suffix derivation based on query object fields
- Torch learning notes (1) -- 19 common ways to create tensor
- Recommend a simple browser tab
- leetcode:556. Next larger element III [simulation + change as little as possible]
- Chisel tutorial - 06 Phased summary: implement an FIR filter (chisel implements 4-bit FIR filter and parameterized FIR filter)
- 我眼中真正优秀的CTO长啥样
- 235. Ancêtre public le plus proche de l'arbre de recherche binaire [modèle LCA + même chemin de recherche]
- Max of PHP FPM_ Some misunderstandings of children
- Integrated easy to pay secondary domain name distribution system
猜你喜欢

【疾病识别】基于matlab GUI机器视觉肺癌检测系统【含Matlab源码 1922期】

Smart wax therapy machine based on STM32 and smart cloud
2022.02.11

CV in transformer learning notes (continuously updated)
Record the errors reported when running fluent in the simulator
EGO Planner代码解析bspline_optimizer部分(2)

Torch learning notes (7) -- take lenet as an example for dataload operation (detailed explanation + reserve knowledge supplement)

Record: pymysql is used in pycharm to connect to the database

leetcode:11. 盛最多水的容器【雙指針 + 貪心 + 去除最短板】
Leetcode: 11. Récipient contenant le plus d'eau [double pointeur + cupidité + enlèvement de la plaque la plus courte]
随机推荐
Raft log replication
Le changement est un thème éternel
Simple solution of physical backup and restore of Damon database
leetcode:11. 盛最多水的容器【双指针 + 贪心 + 去除最短板】
Raft 日志复制
Understanding of database architecture
SQL: special update operation
Processing of user input parameters in shell script
Integrated easy to pay secondary domain name distribution system
High concurrency Architecture - read write separation
硬盘监控和分析工具:Smartctl
[optics] dielectric constant calculation based on MATLAB [including Matlab source code 1926]
Record: solve the problem that MySQL is not an internal or external command environment variable
Verilog HDL continuous assignment statement, process assignment statement, process continuous assignment statement
235. 二叉搜索树的最近公共祖先【lca模板 + 找路径相同】
How does GCN use large convolution instead of small convolution? (the explanation of the paper includes super detailed notes + Chinese English comparison + pictures)
Simulation scheduling problem of SystemVerilog (1)
ActiveMQ的基础
Record the errors reported when running fluent in the simulator
Caddy server agent