当前位置:网站首页>[practice] STM32 FreeRTOS migration series tutorial 5:freertos message queue
[practice] STM32 FreeRTOS migration series tutorial 5:freertos message queue
2022-06-21 09:14:00 【Huaqing vision it open laboratory】
Write it at the front :
This article is 《STM32MP157 Developing a tutorial FreeRTOS Operating system 》 One in a series , The development platform used by the author is Huaqing vision FS-MP1A Development board (STM32MP157 Development board ).stm32mp157 yes ARM Dual core ,2 individual A7 nucleus ,1 individual M4 nucleus ,A7 You can run on the core Linux operating system ,M4 You can run on the core FreeRTOS、RT-Thread And other real-time operating systems ,STM32MP157 Development board, so you can learn Embedded linux, You can also learn. stm32 Single chip microcomputer .
in the light of FS-MP1A Development board , except FreeRTOS Outside the operating system , There are also many other series of tutorials , Include Cortex-A7 Development of article 、Cortex-M4 Development of article 、 Expansion board driver transplantation 、Linux Application development 、Linux System transplantation 、Linux Driving development 、 Hardware design 、 Artificial intelligence machine vision 、Qt Application programming 、Qt Comprehensive project practice, etc . Welcome to your attention , more stm32mp157 Develop tutorials and videos , Technical exchange can be added Q Group 459754978, Thank you for attention .
FS-MP1A Development board Details :https://item.taobao.com/item.htm?id=622457259672
2.FreeRTOS queue
2.1 Introduction to queue
Queues can be used for tasks and tasks 、 Communication between task and interrupt , Between tasks and tasks 、 Transfer data between tasks and interrupts , A limited number of... Can be stored in the queue 、 Fixed size data items .
In general , Queues are first in first out (FIFO) The storage mechanism of , That is to say, the data sent to the queue is extracted first , Of course, you can also use first in and last out (LIFO) Storage buffer ,FreeRTOS Two storage buffer mechanisms are provided in .
The queue does not belong to a specific task , For all tasks, data can be sent to the task , You can also extract data from tasks . Queue function
2.2.1 Create a queue
There are two functions for creating event flag groups , They are as follows :
xQueueCreate(), This function is used to dynamically create queues , The required memory is allocated through dynamic memory management , This function is a macro , When the queue creation function is actually completed xQueueGenericCreate(). The function prototype is as follows :
QueueHandle_t xQueueCreate(UBaseType_t uxQueueLength,
UBaseType_t uxItemSize)
Parameters :
uxQueueLength: The queue length of the queue to be created , Here is the number of items in the queue .
uxItemSize: Each item in the queue ( news ) The length of , The unit is byte .
Return value :
NULL: Queue creation failed .
Other values : The queue handle returned by the successfully created queue .
xQueueCreate Static(), This function creates a queue for static methods , The required memory is allocated by the user , This function is also a macro , The final call is the function xQueueGenericCreateStatic(). The function prototype is as follows :
QueueHandle_t xQueueCreateStatic(UBaseType_t uxQueueLength,
UBaseType_t uxItemSize,
uint8_t* pucQueueStorageBuffer,
StaticQueue_t* pxQueueBuffer)
Parameters :
uxQueueLength: The queue length of the queue to be created , Here is the number of items in the queue .
uxItemSize: Each item in the queue ( news ) The length of , The unit is byte
pucQueueStorage: Point to the storage area of the queue item , That is, the message store , This store requires
Assigned by the user . This parameter must point to a uint8_t An array of types . This
The storage area must be greater than or equal to (uxQueueLength * uxItemsSize) byte .
pxQueueBuffer: This parameter points to a StaticQueue_t Variable of type , Used to save the queue structure .
Return value :
NULL: Queue creation failed .
Other values : The queue handle returned by the successfully created queue .
2.2.2 Sends a message to the queue
After the queue is created, messages can be sent to it ,FreeRTOS To send messages to the queue API Function has 8 individual , They are as follows :
function xQueueSend()、xQueueSendToBcck() and xQueueSendToFront()
These three functions are used to send messages to the queue , Functions are essentially macros , among xQueueSend() and xQueueSendToBcck() Is to add messages to the back of the queue ,xQueueSendToFront() Is to add a message to the front of the queue , These three functions eventually call the same function :xQueueGenericSend(), Can only be used in task functions , The function prototypes are as follows :
BaseType_t xQueueSend( QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait)
BaseType_t xQueueSendToBack(QueueHandle_t xQueue,
const void* pvItemToQueue,
TickType_t xTicksToWait)
BaseType_t xQueueSendToFront(QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait)
Parameters :
xQueue: Handle to the queue , Indicates which queue to send data to , After the queue is created successfully, the
Returns the queue handle for this queue .
pvItemToQueue: Point to the message to send , When sending, the message will be copied to the queue .
xTicksToWait: Blocking time , This parameter indicates that when the queue is full, the task enters the blocking state and waits for the queue
Maximum time the column is idle .
Return value :
pdPASS: Sending message to queue succeeded .
ErrQUEUE_FULL: The queue is full , Message delivery failed
function xQueueOverwrite(), This function is also used to send data to the queue , But when the queue is full, the old data will be overwritten , Whether or not this data has been taken away by other tasks or interrupts , This function is also a macro , The final call is also the function xQueueGenericSend(), The function prototype is as follows :
BaseType_t xQueueOverwrite( QueueHandle_t xQueue,
const void * pvItemToQueue)
Parameters :
xQueue: Handle to the queue , Indicates which queue to send data to , After the queue is created successfully, the
Returns the queue handle for this queue .
pvItemToQueue: Point to the message to send , When sending, the message will be copied to the queue .
Return value :
pdPASS: Sending message to queue succeeded , This function will only return pdPASS! Because during the execution of this function
Don't care if the queue is full , When it is full, it overwrites the old data , In short, it will succeed .
function xQueueGenericSend(), All the previous task level queueing functions finally call this function , The function prototype is as follows :
BaseType_t xQueueGenericSend (QueueHandle_t xQueue,
const void * pvItemToQueue,
TickType_t xTicksToWait,
const BaseType_t xCopyPosition)
Parameters :
xQueue: Handle to the queue , Indicates which queue to send data to , After the queue is created successfully, the
Returns the queue handle for this queue .
pvItemToQueue: Point to the message to send , When sending, the message will be copied to the queue .
xTicksToWait: Blocking time .
xCopyPosition: The way to join the team , There are three kinds of
queueSEND_TO_BACK: Back into the team
queueSEND_TO_FRONT: Forward into the team
queueOVERWRITE: Override team .
Return value :
pdTRUE: Sending message to queue succeeded .
errQUEUE_FULL: The queue is full , Message delivery failed
function xQueueSendFromISR()、xQueueSendToBcckFromISR ()、
xQueueSendToFrontFromISR ()
These three functions are used to send messages to the queue in the interrupt service function , These are the interrupt versions of the previous three functions that send messages to the queue , Functions are also macros in nature , Finally, the same function is called xQueueGenericSendFromISR(), The function prototypes are as follows :
BaseType_t xQueueSendFromISR( QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken)
BaseType_t xQueueSendToBackFromISR(QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken)
BaseType_t xQueueSendToFrontFromISR(QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken)
Parameters :
xQueue: Handle to the queue , Indicates which queue to send data to , After the queue is created successfully, the
Returns the queue handle for this queue .
pvItemToQueue: Point to the message to send , When sending, the message will be copied to the queue .
pxHigherPriorityTaskWoken: Mark whether to switch tasks after exiting this function
Return value :
pdTRUE: Sending message to queue succeeded .
errQUEUE_FULL: The queue is full , Message delivery failed
function xQueueOverwriteFromISR(), This function is xQueueOverwrite() Broken version of , This function is also a macro , The final call is also the function xQueueGenericSendFromISR(), The function prototype is as follows :
BaseType_t xQueueOverwriteFromISR( QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken)
Parameters :
xQueue: Handle to the queue , Indicates which queue to send data to , After the queue is created successfully, the
Returns the queue handle for this queue .
pvItemToQueue: Point to the message to send , When sending, the message will be copied to the queue .
pxHigherPriorityTaskWoken: Mark whether to switch tasks after exiting this function
Return value :
pdTRUE: Sending message to queue succeeded .
errQUEUE_FULL: The queue is full , Message delivery failed
function xQueueGenericSendFromISR(), All previous interrupt level queueing functions finally call this function , This function is also a function xQueueGenericSend() Broken version of , The function prototype is as follows :
BaseType_t xQueueGenericSend FromISR (QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t* pxHigherPriorityTaskWoken,
BaseType_t xCopyPosition)
Parameters :
xQueue: Handle to the queue , Indicates which queue to send data to , After the queue is created successfully
The queue handle of this queue will be returned .
pvItemToQueue: Point to the message to send , When sending, the message will be copied to the queue .
pxHigherPriorityTaskWoken: Mark whether to switch tasks after exiting this function .
xCopyPosition: The way to join the team , There are three kinds of
queueSEND_TO_BACK: Back into the team
queueSEND_TO_FRONT: Forward into the team
queueOVERWRITE: Override team .
Return value :
pdTRUE: Sending message to queue succeeded .
errQUEUE_FULL: The queue is full , Message delivery failed
2.2.3 Read messages from the queue
Corresponding to joining the team , Then there will be a team , Getting out of the queue is getting messages from the queue ,FreeRTOS Out of the queue provided in API The functions are as follows :
xQueueReceive(), This function is used to read a message from the queue in the task , This data will be deleted after reading successfully , This function is a macro , The function that is actually executed is xQueueGenericReceive(), The prototype of this function is as follows :
BaseType_t xQueueReceive(QueueHandle_t xQueue,
void * pvBuffer,
TickType_t xTicksToWait)
Parameters :
xQueue: Handle to the queue , Indicate which queue data to read , This message will be returned after the queue is successfully created
Queue handle of the queue .
pvBuffer: Buffer to hold data , During the process of reading the queue, the read data will be copied to this
Buffer zone .
xTicksToWait: Blocking time , This parameter indicates that when the queue is empty, the task enters the blocking state and waits for several times in the queue
According to the maximum time .
Return value :
pdTRUE: Reading message from queue succeeded .
pdFALSE: Failed to read message from queue .
xQueuePeek(), This function is also used to read a message from the queue in the task , However, this data will not be deleted after successful reading , This function is also a macro , The function that is actually executed is xQueueGenericReceive(), The prototype of this function is as follows :
BaseType_t xQueuePeek( QueueHandle_t xQueue,
void * pvBuffer,
TickType_t xTicksToWait)
Parameters :
xQueue: Handle to the queue , Indicate which queue data to read , This message will be returned after the queue is successfully created
Queue handle of the queue .
pvBuffer: Buffer to hold data , During the process of reading the queue, the read data will be copied to this
Buffer zone .
xTicksToWait: Blocking time , This parameter indicates that when the queue is empty, the task enters the blocking state and waits for several times in the queue
According to the maximum time .
Return value :
pdTRUE: Reading message from queue succeeded .
pdFALSE: Failed to read message from queue .
xQueueReceiveFromISR(), This function is xQueueReceive() Broken version of , Used to read messages from the queue in the interrupt service function , The function prototype is as follows :
BaseType_t xQueueReceiveFromISR(QueueHandle_t xQueue,
void* pvBuffer,
BaseType_t * pxTaskWoken)
Parameters :
xQueue: Handle to the queue , Indicate which queue data to read , After the queue is successfully created, it will return
The queue handle for this queue .
pvBuffer: Buffer to hold data , During the process of reading the queue, the read data will be copied here
In a buffer .
pxTaskWoken: Mark whether to switch tasks after exiting this function
Return value :
pdTRUE: Reading data from queue succeeded .
pdFALSE: Failed to read data from queue .
xQueuePeekFromISR (), This function is xQueuePeek() Broken version of , After reading the data successfully, this data will not be deleted , The prototype of this function is as follows :
BaseType_t xQueuePeekFromISR( QueueHandle_t xQueue,
void * pvBuffer)
Parameters :
xQueue: Handle to the queue , Indicate which queue data to read , This message will be returned after the queue is successfully created
Queue handle of the queue .
pvBuffer: Buffer to hold data , During the process of reading the queue, the read data will be copied to this
Buffer zone .
Return value :
pdTRUE: Reading message from queue succeeded .
pdFALSE: Failed to read message from queue .
2.3.1 Experimental design
This design detects three key states through interruption , Read different key values and send them to the queue , Then read the messages in the queue in the task , Make different processing according to different instructions .
May refer to 12.3.2 Chapter to import the existing project , Project storage path 【 Huaqing vision -FS-MP1A Development of information \02- Program source code \ARM Architecture and interface technology \FreeRTOS\6_MP1A-FreeRTOS-Queue】
The tasks and their functions are as follows :
StartTask02(): Read the data in the queue , Do different processing according to the read data .
StartDefaultTask(): Read the key value , And send it to the queue .
2.3.2 Experimental process and analysis
First , Configure... According to the previous chapters CubeMX, Configure... According to the previous section “FREERTOS”, Generate code when finished . stay StartDefaultTask() And StartTask02() Add the following code to .
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN 5 */
/* Infinite loop */
uint8_t err;
for(;;)
{
if((Key_Queue!=NULL)&&(key)) // Message queue Key_Queue Create success , And the button is pressed
{
err=xQueueSend(Key_Queue,&key,10);
if(err==pdPASS) // Send key value
{
printf("\r data transmission success \n");
}
}
vTaskDelay(10); // Time delay 10ms, That is to say 10 Individual clock time
}
/* USER CODE END 5 */
}
void StartTask02(void *argument)
{
/* USER CODE BEGIN StartTask02 */
/* Infinite loop */
for(;;)
{
if(Key_Queue!=NULL)
{
if(xQueueReceive(Key_Queue,&key,portMAX_DELAY))// The request message Key_Queue
{
switch(key)
{
case EVENTBIT_1://
LED_1_TOG();
break;
case EVENTBIT_2://
LED_2_TOG();
break;
case EVENTBIT_3://
LED_3_TOG();
break;
}
key = 0;
}
}
vTaskDelay(10); // Time delay 10ms, That is to say 10 Individual clock time
}
/* USER CODE END StartTask02 */
}
in addition , First you need to call... In the main function xQueueCreate () Function to create a message queue , Get the successfully created queue handle .
Write the key interrupt callback function as follows
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
case GPIO_PIN_8:
if(HAL_GPIO_ReadPin(GPIOF,GPIO_PIN_8) == GPIO_PIN_SET) /* read KEY3 PF8 state */
key = EVENTBIT_3;
break;
case GPIO_PIN_7:
if(HAL_GPIO_ReadPin(GPIOF,GPIO_PIN_7) == GPIO_PIN_SET) /* read KEY2 PF7 state */
key = EVENTBIT_2;
break;
case GPIO_PIN_9:
if(HAL_GPIO_ReadPin(GPIOF,GPIO_PIN_9) == GPIO_PIN_SET) /* read KEY1 PF9 state */
key = EVENTBIT_1;
break;
}
}
here , When pressed KEY1 Key time ,LED1 Level reversal ; When pressed KEY2 Key time ,LED2 Level reversal ; When pressed KEY3 Key time ,LED3 Level reversal .
Hardware platform : Huaqing vision FS-MP1A Development board (STM32MP157)
边栏推荐
- Shortcut keys accumulated when using various software
- C#中的list操作入门
- Unity development related blog collection
- High precision calculation
- adb使用技巧和usb通信原理
- R language factor variable type: use factor function to convert string vector to factor vector, and use as The factor function converts a factor vector into a string vector and uses as The numeric fun
- doc常用语法,更新中……
- finally block can not complete normally
- The way of filling holes in APK Decompilation
- 【实战】STM32 FreeRTOS移植系列教程7:FreeRTOS 事件标志组
猜你喜欢

Pingcap was selected as the "voice of customers" of Gartner cloud database in 2022, and won the highest score of "outstanding performer"

Abstractqueuedsynchronizer (AQS) source code detailed analysis - semaphore source code analysis
![[Mgt] model Mgt for code interpretation](/img/4f/694e7b93626436007021b718ad69b5.png)
[Mgt] model Mgt for code interpretation
stm32mp1 Cortex M4开发篇10:扩展板数码管控制

Mono of unity 5 can also support C # 6

【实战】STM32MP157开发教程之FreeRTOS系统篇3:FreeRTOS 计数型信号量

Storage of C language integer in memory
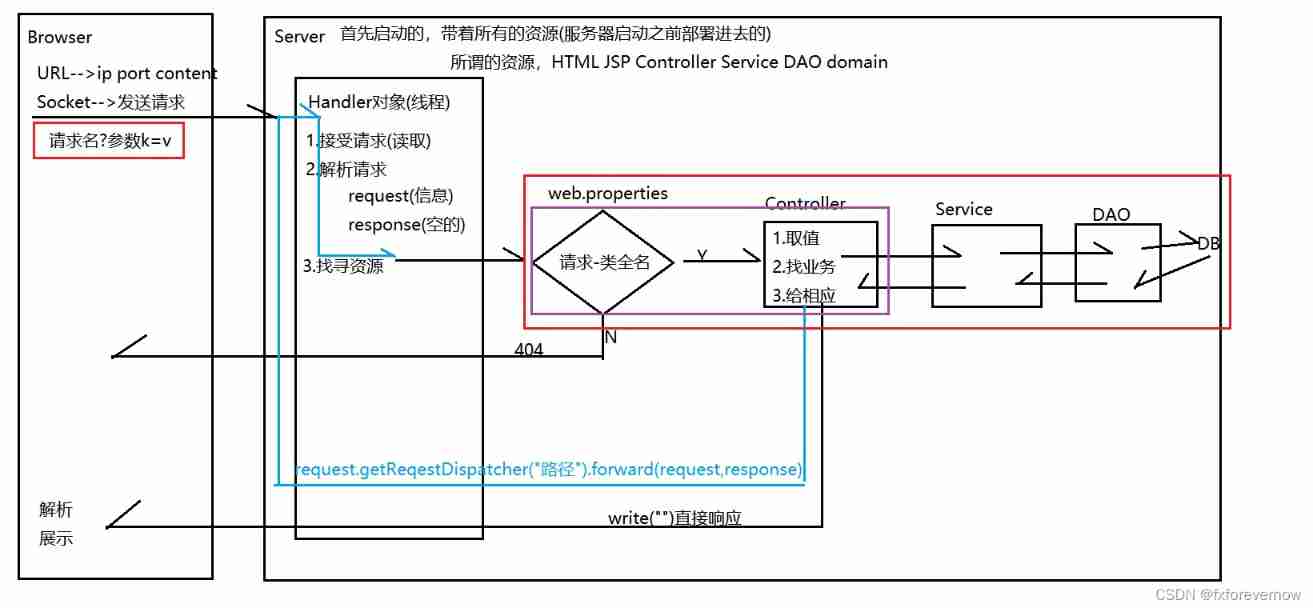
Request and response must know

stm32mp1 Cortex M4开发篇8:扩展板LED灯控制实验
Mono fourni avec l'unit é 5 peut également supporter C # 6
随机推荐
TiDB3.0- 4.0 内存控制/修改日志保存天数/最大索引长度
Abstractqueuedsynchronizer (AQS) source code detailed analysis - condition queue process analysis
Abstractqueuedsynchronizer (AQS) source code analysis - cyclicbarrier source code analysis
finally block can not complete normally
Retrofit扩展阅读
The next stop of Intelligent Manufacturing: cloud native + edge computing two wheel drive
Style penetration of vant UI components -- that is, some styles in vant UI components cannot be modified
Audio immersive experience
适配华为机型中出现的那些坑
leetcode:打印两个有序链表的公共部分
STL tutorial 3- type conversion static_ cast、dynamic_ cast、const_ cast、reinterpret_ Cast method
Leetcode: print the common part of two ordered linked lists
【实战】STM32MP157开发教程之FreeRTOS系统篇3:FreeRTOS 计数型信号量
PingCAP 入选 2022 Gartner 云数据库“客户之声”,获评“卓越表现者”最高分
C # implement callback
Linux环境下MySQL的安装过程
Summary of Web automated testing
Unity Detailed explanation of meta file function
R language ggplot2 visualization, draw two lines in the same ggplot2 graph in a graph, and use postscript function to save the visualization image to PS format file in the specified directory
如何使用 adb shell 查询进程流量情况