当前位置:网站首页>Code practice | ground extraction with logo-loam
Code practice | ground extraction with logo-loam
2022-06-24 01:18:00 【3D vision workshop】
Edit computer vision life
The authors introduce :Zach, Mobile robot practitioners , Love the mobile robot industry , Aspire to science and technology to help a better life .
LeGO-LOAM The first step of the framework design idea is to extract and separate the ground . This article will explain in detail LeGO-LOAM How to extract the ground .
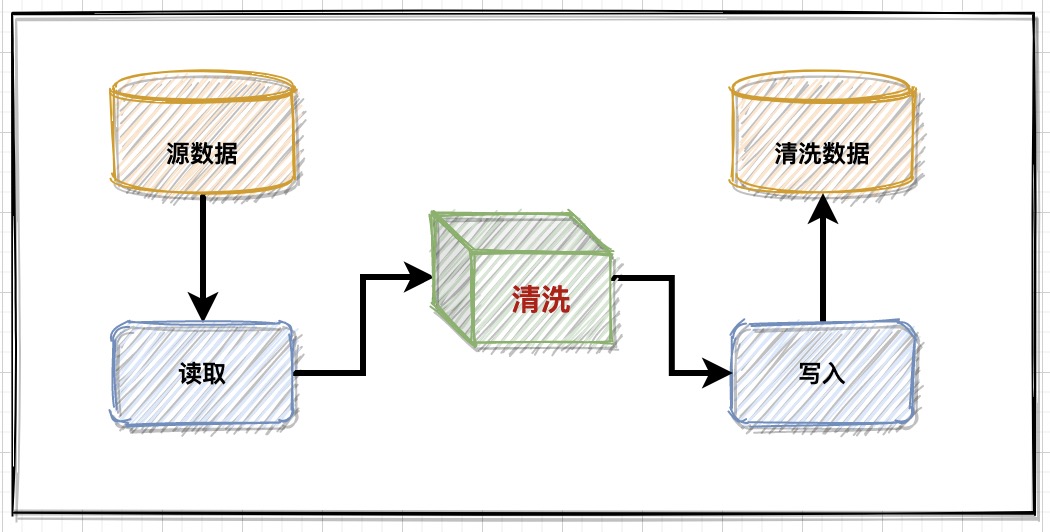
The idea of ground extraction
As shown in the figure above , The two connected scan lines are marked at two points in the same column on the ground A() and B(). Calculation A,B Height difference between two points , Plane distance , Calculation and The triangle angle of the construction ; If , I think there are two points , Belongs to the ground point .
The above ground detection method is relatively simple , If you encounter some flat large countertops , It can also be mistaken for the ground . We can use the installation position of the lidar as a priori information ( For example, height information ) To further judge the ground point .
Ground extraction source code implementation
Before looking at the ground extraction source code , Let's take a look at some key parameters . In the file LEGO-LOAM/LeGO-LOAM/include/utility.h in :
// VLP-16 extern const int N_SCAN = 16; // Number of laser radar lines extern const int Horizon_SCAN = 1800; // VLP-16 A harness 1800 A little bit , 360 degree . extern const float ang_res_x = 0.2; // Horizontal resolution of a single harness extern const float ang_res_y = 2.0; // Vertical resolution between harnesses extern const float ang_bottom = 15.0+0.1; // extern const int groundScanInd = 7; // Ground harness ID. Because the lidar is placed horizontally , Not all harnesses sweep to the ground , Here take 7 The harness sweeps to the ground
The above parameters define Velodyne-16 Several attribute values of linear lidar , In the following code, we will use . except extern const int groundScanInd = 7;, Other attribute values may be easier to understand .
LeGO-LOAM When detecting ground point clouds , It's not all traversal scan( Scan line ) Of , Because the radar is placed horizontally , Part of it scan( Scan line ) It was shot into the sky , Only seven bars close to the ground are taken from the frame scan( Scan line )
In the file LEGO-LOAM/LeGO-LOAM/src/imageProjection.cpp in , Let's start with a few important variables :
cv::Mat rangeMat; // range matrix for range image (range Map) cv::Mat labelMat; // label matrix for segmentaiton marking ( For point cloud segmentation label matrix ) cv::Mat groundMat; // ground matrix for ground cloud marking ( Used to mark ground point clouds )
These variables cv::Mat rangeMat; Corresponding to range Map, In this paper, all scanning points of linear lidar Make up a range Map; Corresponding to label,label The non ground points are classified and clustered ;cv::Mat groundMat; The ground points are marked in the code .
The ground extraction function is implemented in imageProhection/void groundRemoval() Function . The code in this function is divided into three parts :
- The first part : Traverse all points , Detect ground points , stay
groundMat Mark ground points in;
// groundMat: The identified ground points , Marked on groundMat in
// -1, no valid info to check if ground of not( Invalid point )
// 0, initial value, after validation, means not ground ( Non ground point )
// 1, ground( Indicates the ground point )
for (size_t j = 0; j < Horizon_SCAN; ++j) { // Ergodic column , A column of 1800 A little bit
for (size_t i = 0; i < groundScanInd; ++i) { // Traversal line , Ground harness row 7 individual
// Point clouds connected by two rows in the same column ID
lowerInd = j + ( i )*Horizon_SCAN;
upperInd = j + (i+1)*Horizon_SCAN;
// If the two points taken have invalid points , This point lowerInd perhaps (i,j) On the point cloud map groundMat Is also an invalid point in
if (fullCloud->points[lowerInd].intensity == -1 ||
fullCloud->points[upperInd].intensity == -1) {
// no info to check, invalid points
groundMat.at<int8_t>(i,j) = -1;
continue;
}
// Get two points lowerInd and upperInd stay x/y/z Difference in direction
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;
diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;
diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;
// Calculate two points lowerInd and upperInd Vertical height diffZ Angle with horizontal distance
angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;
// If the above included angle is less than 10, be (i, j) and (i+1, j) Set as ground sign 1
if (abs(angle - sensorMountAngle) <= 10) {
groundMat.at<int8_t>(i,j) = 1;
groundMat.at<int8_t>(i+1,j) = 1;
}
}
}In the above code , First, two points of two rows connected in the same column are extracted in turn :
// Point clouds connected by two rows in the same column ID lowerInd = j + ( i )*Horizon_SCAN; upperInd = j + (i+1)*Horizon_SCAN;
then , Judge whether the two extracted points are invalid points according to the intensity value ; If it is an invalid point , Then it is marked with , Re point ;
// If the two points taken have invalid points , This point lowerInd perhaps (i,j) On the point cloud map groundMat Is also an invalid point in
if (fullCloud->points[lowerInd].intensity == -1 ||
fullCloud->points[upperInd].intensity == -1) {
// no info to check, invalid points
groundMat.at<int8_t>(i,j) = -1;
continue;
} Last , Calculate two points lowerInd and upperInd The angle between the height difference and the plane distance , If it is less than , It's in groundMap The corresponding position is set to .
// Get two points lowerInd and upperInd stay x/y/z Difference in direction
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;
diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;
diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;
// Calculate two points lowerInd and upperInd Vertical height diffZ Angle with horizontal distance
angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;
// If the above included angle is less than 10, be (i, j) and (i+1, j) Set as ground sign 1
if (abs(angle - sensorMountAngle) <= 10) {
groundMat.at<int8_t>(i,j) = 1;
groundMat.at<int8_t>(i+1,j) = 1;
}- The second part : stay
labelMatRemove ground points and invalid points ;labelMatAll the points are clustered and marked , We need to eliminate Ground point and Invalid point , there Invalid point It can be understood as the point where the return signal is not received .
// stay labelMat Remove ground points and invalid points ( Point that did not receive the return value )
for (size_t i = 0; i < N_SCAN; ++i) {
for (size_t j = 0; j < Horizon_SCAN; ++j) {
if (groundMat.at<int8_t>(i,j) == 1 || rangeMat.at<float>(i,j) == FLT_MAX) {
labelMat.at<int>(i,j) = -1;
}
}
}- The third part : Extract the ground point cloud and store it in groundCloud;
// Extract the ground point cloud and store it in groundCloud
if (pubGroundCloud.getNumSubscribers() != 0) {
for (size_t i = 0; i <= groundScanInd; ++i) {
for (size_t j = 0; j < Horizon_SCAN; ++j) {
if (groundMat.at<int8_t>(i,j) == 1)
groundCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]);
}
}
}The extracted point cloud is published through the theme , Can pass rviz Show it . As shown in the figure below , In order to distinguish clearly Ground point cloud , Adjust its color to .
Reference material
- https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
边栏推荐
- 牛学长周年庆活动:软件大促限时抢,注册码免费送!
- Part of the problem solution of unctf2020
- [CVPR 2022] high resolution small object detection: cascaded sparse query for accelerating high resolution smal object detection
- Graduation project - thesis writing notes [design topic type, thesis writing details, design materials]
- Skywalking installation and deployment practice
- Dart series part: asynchronous programming in dart
- [technical grass planting] use webhook to automatically deploy my blogs on multiple sites in Tencent cloud
- How to open Tencent enterprise mailbox and Tencent enterprise mailbox login portal
- Selenium crawls stocks in practice
- Shardingsphere-proxy-5.0.0 implementation of capacity range partition (V)
猜你喜欢

Pad User Guide

实时计算框架:Flink集群搭建与运行机制

Everything I see is the category of my precise positioning! Open source of a new method for saliency map visualization
数据管理:业务数据清洗,落地实现方案

CVPR2022 | 可精简域适应
Cvpr2022 𞓜 thin domain adaptation
![[CVPR 2022] high resolution small object detection: cascaded sparse query for accelerating high resolution smal object detection](/img/79/7dfc30565ddee0769ef5f1bc239b5d.png)
[CVPR 2022] high resolution small object detection: cascaded sparse query for accelerating high resolution smal object detection
![[applet] when compiling the preview applet, a -80063 error prompt appears](/img/4e/722d76aa0ca3576164fbed4e2c4db2.png)
[applet] when compiling the preview applet, a -80063 error prompt appears
WinSCP和PuTTY的安装和使用

Open source model library of flying propeller industry: accelerating the development and application of enterprise AI tasks
随机推荐
Zhongshanshan: engineers after being blasted will take off | ONEFLOW u
Use recursion to form a multi-level directory tree structure, with possibly the most detailed notes of the whole network.
Echo framework: automatically add requestid
[OSG] OSG development (04) - create multiple scene views
【Redis进阶之ZipList】如果再有人问你什么是压缩列表?请把这篇文章直接甩给他。
【机器学习】线性回归预测
JS input / output statements, variables
[technical grass planting] take you to Tencent cloud's private cloud disk in ten minutes
Everything I see is the category of my precise positioning! Open source of a new method for saliency map visualization
持续测试和质量保障的关系
Forward design of business application data technology architecture
苹果Iphone14搭载北斗导航系统,北斗VS GPS有哪些优势?
How to write peer-reviewed papers
【CVPR 2020】会议版本:A Physics-based Noise Formation Model for Extreme Low-light Raw Denoising
Local cache selection (guava/caffeine/ohc) and performance comparison
How to improve program performance
[CVPR 2020 oral] a physics based noise formation model for extreme low light raw denoising
Shardingsphere-proxy-5.0.0 implementation of capacity range partition (V)
分别用SVM、贝叶斯分类、二叉树、CNN实现手写数字识别
[machine learning] linear regression prediction