当前位置:网站首页>Étalonnage de la caméra (objectif et principe d'étalonnage)
Étalonnage de la caméra (objectif et principe d'étalonnage)
2022-06-24 07:27:00 【Non, Li buxing.】
1.Objet de l'étalonnage de la caméra:
(1)L'un est de corriger la distorsion de l'image causée par la distorsion de la lentille,Par exemple,Ligne droite dans la réalité,Convexe ou concave après prise d'image,Cette condition peut être corrigée après l'étalonnage de la caméra;
(2) L'autre est basé sur le tournage 2 - D Images pour reconstruire une scène 3D ,Parce que le processus d'étalonnage est une transformation mathématique à travers une série de points 3D et ses points d'image 2D correspondants,Trouver les paramètres internes et externes de la caméra.
Caméra étalonnée,On peut mesurer la distance、Reconstruction de scènes 3D, etc.
2.Quatre systèmes de coordonnées
L'un des objectifs de l'étalonnage de la caméra est d'établir la correspondance entre les points de coordonnées de l'objet du monde tridimensionnel au plan d'imagerie,Voici donc les quatre systèmes de coordonnées:
Système mondial de coordonnées:Système de coordonnées du monde 3D défini par l'utilisateur,Introduit pour décrire la position de la cible dans le monde réel et la position de la caméra.
Système de coordonnées de la caméra:Le système de coordonnées établi sur la caméra,Défini pour décrire la position de l'objet du point de vue de la caméra,En tant que système de coordonnées et d'images pour communiquer le monde/L'anneau central du système de coordonnées pixels.
Système de coordonnées d'image:Pour décrire la transmission projetée d'un objet du système de coordonnées de la caméra au système de coordonnées de l'image pendant le processus d'imagerie,Pour obtenir plus facilement les coordonnées sous le système de coordonnées pixels.
Système de coordonnées pixels:Pour décrire les points d'image sur l'image numérique après l'imagerie de l'objet(Photos)Les coordonnées de,C'est le système de coordonnées dans lequel se trouve l'information que nous avons réellement lue à partir de la caméra,Les unités sont(Nombre de pixels).
3.Conversion des coordonnées

Système mondial de coordonnées:Xw、Yw、Zw.
Système de coordonnées de la caméra: Xc、Yc、Zc.
Système de coordonnées d'image:x、y.
Système de coordonnées pixels:u、v.
Parmi eux, Du système de coordonnées de la caméra Z L'axe coïncide avec l'Axe optique , Et perpendiculaire au plan du système de coordonnées d'image et passant par l'origine du système de coordonnées d'image , La distance entre le système de coordonnées de la caméra et le système de coordonnées de l'image est la distance focale f. Plan du système de coordonnées pixels u-v Et le plan du système de coordonnées d'image x-yCoïncidence, Mais l'origine du système de coordonnées pixels est dans le coin supérieur gauche de l'image .
3.1World Coordinate System to Camera Coordinate System
Supposons qu'il tourne autour dexRotation de l'arbre(Dans le sens contraire des aiguilles d'une montre)


Et ainsi de suite., Tourner autour d'autres axes (Dans le sens horaire)


Système de coordonnées du monde au système de coordonnées de la caméra 6Des degrés de liberté, Traduction en plus de la rotation

3.2 Système de coordonnées de la caméra au système de coordonnées de l'image


3.3 Système de coordonnées d'image au système de coordonnées pixels
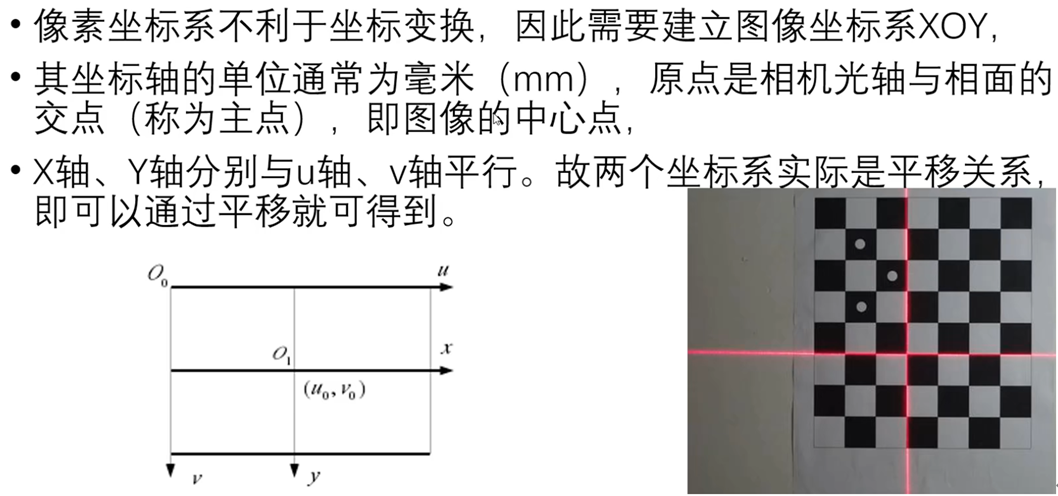
L'origine du système de coordonnées de l'image est au centre de l'image ,Unitémm.
L'origine du système de coordonnées pixels est dans le coin supérieur gauche de l'image ,Les unités sont en pixelsPixel(- Oui.).
dx,dy: Est un paramètre inhérent au capteur , Représente le nombre de millimètres par Pixel .
u0,v0: Représente l'offset de l'origine du système de coordonnées d'image par rapport au système de coordonnées pixels ,Les unités sont en pixels.


3.4 Tout le processus de transformation du système mondial de coordonnées en système de coordonnées pixels 
Jusqu'ici., Pour reconstruire une scène 3D à partir d'une image 2D prise , Alors, demandez une référence interne M1Et extraginsengM2.
3.5Zhang zhengyou Calibration Method




 Singularité(Homography)Transformation.Il peut être interprété simplement comme étant utilisé pour décrire la cartographie de position d'un objet entre le système mondial de coordonnées et le système de coordonnées pixels.La matrice de transformation correspondante est appelée matrice de contrainte unique.
Singularité(Homography)Transformation.Il peut être interprété simplement comme étant utilisé pour décrire la cartographie de position d'un objet entre le système mondial de coordonnées et le système de coordonnées pixels.La matrice de transformation correspondante est appelée matrice de contrainte unique.



![]()
Comment obtenir une matrice de réponse unique à partir d'un diagramme d'étalonnage ?
Après une série d'introductions , Nous devrions avoir une idée générale de la façon de calculer la matrice de Singleton à partir des cartes d'étalonnage imprimées et des photos prises H. Résumons les grandes lignes du processus .
1. Imprimer un dessin d'étalonnage du vérificateur , Collez - le sur la surface d'un objet plat .
2. Prenez des photos d'un ensemble de damiers dans différentes directions , On peut le faire en déplaçant la caméra , Vous pouvez également déplacer l'image d'étalonnage pour .
3. Pour chaque image prise , Détecter les points caractéristiques de tous les damiers de l'image (Corner point, C'est l'intersection de l'échiquier noir et blanc dans l'image ci - dessous , Il y a un point d'angle dans le cercle rouge du milieu ,Quatre diagonales( Rouge, jaune, bleu, vert ) C'est le coin le plus spécial ). Nous définissons les dessins d'échiquier imprimés dans le système mondial de coordonnées Zw=0Sur le plan de, L'origine du système mondial de coordonnées est située dans le coin fixe de la feuille d'échiquier de gauche ( Comme le point jaune dans l'image ci - dessous ). L'origine du système de coordonnées pixels est située dans le coin supérieur gauche de l'image de droite .

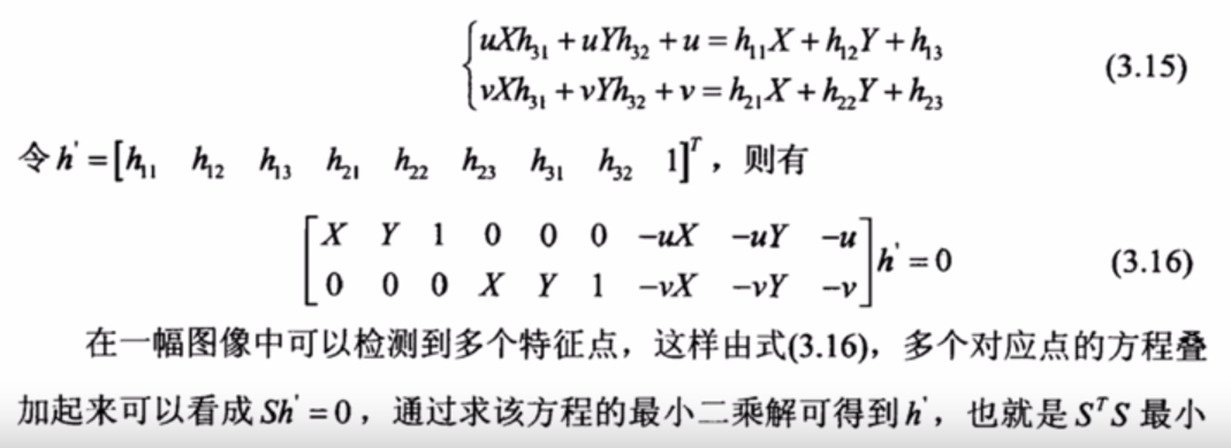
Parce que dans le dessin d'étalonnage du échiquier Tous les Les coordonnées spatiales des points d'angle sont connues , Les coordonnées pixels de ces points d'angle correspondant aux points d'angle de l'image d'étalonnage photographiée sont également connues , Si on avait ça N>=4 Paires de points correspondants ( Plus les calculs sont robustes ),Peut être basé surLM La méthode isooptimisée donne Une matrice de réponse unique dans cette perspective H. Bien sûr, il n'est généralement pas nécessaire d'écrire une fonction pour réaliser la matrice de calcul ,OpenCV Il y a des fonctions prêtes à l'emploi qui peuvent être appelées .
Mais, Ce qui précède n'est qu'une dérivation théorique , Dans un scénario d'application réel , Les paires de points que nous calculons contiennent du bruit . Par exemple, la position du point s'écarte de quelques pixels , Il y a même une mauvaise correspondance entre les points caractéristiques ,Si seulement4 Paires de points pour calculer la matrice de réponse unique , Ça va faire une grosse erreur .Donc,, Pour rendre les calculs plus précis , En général, on utilise beaucoup plus de 4 Paires de points pour calculer la matrice de réponse unique . De plus, il est souvent difficile d'obtenir la solution optimale des équations ci - dessus en utilisant la méthode linéaire directe , Par conséquent, d'autres méthodes d'optimisation sont généralement utilisées dans la pratique ,Comme la décomposition de la valeur singulière、Levenberg-Marquarat(LM)Algorithmes
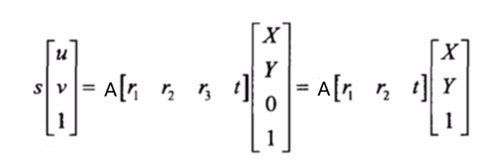
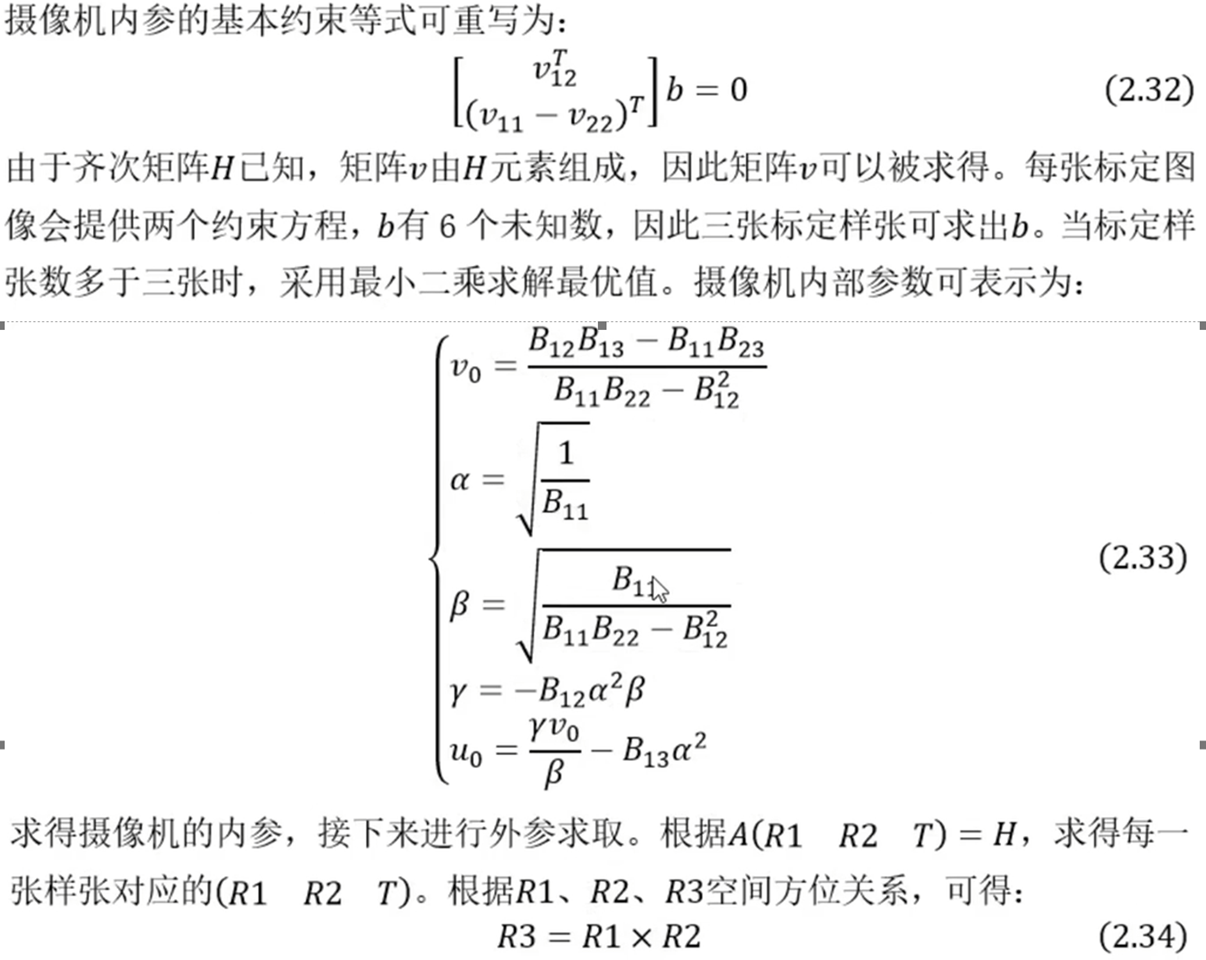
Matrice de contrainte unique obtenue par la méthode ci - dessus HAprès,Voici commentH Inverser les paramètres internes et externes de la caméra

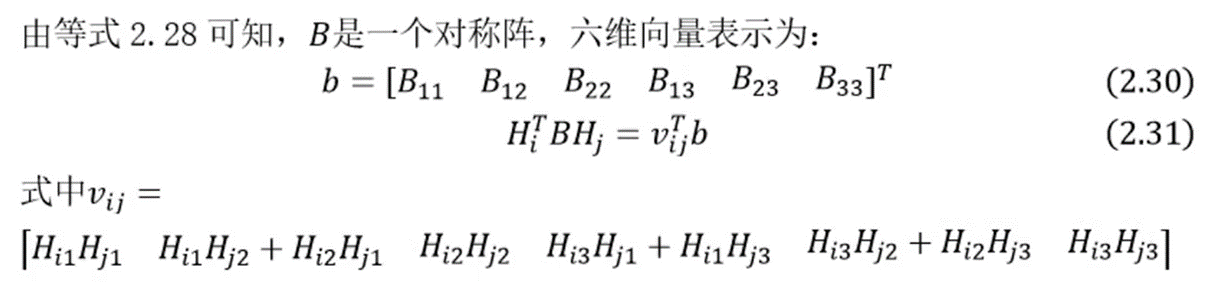
Par dessus2.28Avec2.29Oui.:

Peut être calculé par lui - mêmeBEst une Matrice diagonale,Alors...BSeulement6Inconnu,Donc le vecteurbParamètres6Paramètres
Quelques images deBCapture d'écran vidéo de la station,Bienvenue à l'échange et à l'apprentissage.
Il est fortement recommandé de lire cet article : Explication détaillée du principe mathématique de la méthode d'étalonnage Zhang zhengyou pour l'étalonnage de la caméra (Y comprispythonCode source) - Oui.
边栏推荐
- 【帧率倍频】基于FPGA的视频帧率倍频系统verilog开发实现
- 与(&&)逻辑或(||),动态绑定结合三目运算
- 利用微搭低代码实现级联选择
- [image fusion] image fusion based on directional discrete cosine transform and principal component analysis with matlab code
- 第三方软件测试公司如何选择?2022国内软件测试机构排名
- 【信号识别】基于深度学习CNN实现信号调制分类附matlab代码
- Software performance test analysis and tuning practice path - JMeter's performance pressure test analysis and tuning of RPC Services - manuscript excerpts
- The initial user names and passwords of Huawei devices are a large collection that engineers involved in Huawei business should keep in mind and collect!
- Stop looking! The most complete data analysis strategy of the whole network is here
- 【图像融合】基于伪 Wigner 分布 (PWD) 实现图像融合附matlab代码
猜你喜欢

PIP install XXX on the terminal but no module named XXX on pycharm
![[image fusion] image fusion based on pseudo Wigner distribution (PWD) with matlab code](/img/e0/14cd7982fb3059fed235470d91126e.png)
[image fusion] image fusion based on pseudo Wigner distribution (PWD) with matlab code
![[WUSTCTF2020]alison_likes_jojo](/img/a9/dcc6f524772cd0b8781289cbaef63f.png)
[WUSTCTF2020]alison_likes_jojo

Software performance test analysis and tuning practice path - JMeter's performance pressure test analysis and tuning of RPC Services - manuscript excerpts
How can win11 set the CPU performance to be fully turned on? How does win11cpu set high performance mode?

JVM debugging tool -jmap
![[wustctf2020] climb](/img/b6/4a0582144c3125e7a0666bbbbfe29d.png)
[wustctf2020] climb

Tutorial on simple use of Modbus to BACnet gateway
╯︵ ┻━┻](/img/26/6986a8ae6c00eb2431a082dc0ff978.png)
[DDCTF2018](╯°□°)╯︵ ┻━┻

Intranet learning notes (4)
随机推荐
Fine! Storage knowledge is a must for network engineers!
第三方软件测试公司如何选择?2022国内软件测试机构排名
What are the dazzling skills of spot gold?
Vmware tools still exist after normal uninstallation for many times. How to solve it
Bjdctf 2020 Bar _ Babystack
Analog display of the module taking software verifies the correctness of the module taking data, and reversely converts the bin file of the lattice array to display
[security] how to [host security - hybrid cloud version] support secure access to non Tencent virtual machines
Introduction to game design and development - layered quaternion - dynamic layer
[WordPress website] 6 Article content copy prevention
PCL point cloud random sampling by ratio
MFC多线程 信号量CSemaphore 临界区与互斥 事件
内网学习笔记(4)
PIP install XXX on the terminal but no module named XXX on pycharm
【图像特征提取】基于脉冲耦合神经网络(PCNN)实现图像特征提取含Matlab源码
I failed to delete the database and run away
MySQL enable binlog
Graduation season advance technology
(CVE-2020-11978)Airflow dag中的命令注入漏洞复现【vulhub靶场】
[GUET-CTF2019]zips
[WUSTCTF2020]alison_ likes_ jojo