Describe the bug
I'm enjoying the book a lot. The best book on the subject and I've read Sutton & Barto, but I'm an empiricist and not an academic. Anyway, I can run all the examples in the book in 'dev' and 'train' modes but not in 'search' mode. They all end with error. I don't see anybody complaining about this so it must be a rooky mistake on my part. I hope you can help so I can continue enjoying the book to its fullest.
To Reproduce
- OS and environment: Ubuntu 18.04
- SLM Lab git SHA (run
git rev-parse HEAD to get it): What?
spec file used: benchmark/reinforce/reinforce_cartpole.json
Additional context
I'm showing the error logs for Code 2.15 in page 50, but I get similar error logs for all the other codes ran in 'search' mode.
There are 32 files in the 'data' folder, no plots.
All the folders in the 'data' folder are empty except for 'log' which has a file with this
[2020-01-30 11:03:56,907 PID:3351 INFO search.py run_ray_search] Running ray search for spec reinforce_cartpole
NVIDIA drive version: 440.33.01
CUDA version: 10.2
Error logs
python run_lab.py slm_lab/spec/benchmark/reinforce/reinforce_cartpole.json reinforce_baseline_cartpole search
[2020-01-30 11:38:57,177 PID:4355 INFO run_lab.py read_spec_and_run] Running lab spec_file:slm_lab/spec/benchmark/reinforce/reinforce_cartpole.json spec_name:reinforce_baseline_cartpole in mode:search
[2020-01-30 11:38:57,183 PID:4355 INFO search.py run_ray_search] Running ray search for spec reinforce_baseline_cartpole
2020-01-30 11:38:57,183 WARNING worker.py:1341 -- WARNING: Not updating worker name since `setproctitle` is not installed. Install this with `pip install setproctitle` (or ray[debug]) to enable monitoring of worker processes.
2020-01-30 11:38:57,183 INFO node.py:497 -- Process STDOUT and STDERR is being redirected to /tmp/ray/session_2020-01-30_11-38-57_183527_4355/logs.
2020-01-30 11:38:57,288 INFO services.py:409 -- Waiting for redis server at 127.0.0.1:59003 to respond...
2020-01-30 11:38:57,409 INFO services.py:409 -- Waiting for redis server at 127.0.0.1:55931 to respond...
2020-01-30 11:38:57,414 INFO services.py:806 -- Starting Redis shard with 3.35 GB max memory.
2020-01-30 11:38:57,435 INFO node.py:511 -- Process STDOUT and STDERR is being redirected to /tmp/ray/session_2020-01-30_11-38-57_183527_4355/logs.
2020-01-30 11:38:57,435 INFO services.py:1441 -- Starting the Plasma object store with 5.02 GB memory using /dev/shm.
2020-01-30 11:38:57,543 INFO tune.py:60 -- Tip: to resume incomplete experiments, pass resume='prompt' or resume=True to run()
2020-01-30 11:38:57,543 INFO tune.py:223 -- Starting a new experiment.
== Status ==
Using FIFO scheduling algorithm.
Resources requested: 0/8 CPUs, 0/1 GPUs
Memory usage on this node: 2.1/16.7 GB
2020-01-30 11:38:57,572 WARNING logger.py:130 -- Couldn't import TensorFlow - disabling TensorBoard logging.
2020-01-30 11:38:57,573 WARNING logger.py:224 -- Could not instantiate <class 'ray.tune.logger.TFLogger'> - skipping.
== Status ==
Using FIFO scheduling algorithm.
Resources requested: 4/8 CPUs, 0/1 GPUs
Memory usage on this node: 2.2/16.7 GB
Result logdir: /home/joe/ray_results/reinforce_baseline_cartpole
Number of trials: 2 ({'RUNNING': 1, 'PENDING': 1})
PENDING trials:
- ray_trainable_1_agent.0.algorithm.center_return=False,trial_index=1: PENDING
RUNNING trials:
- ray_trainable_0_agent.0.algorithm.center_return=True,trial_index=0: RUNNING
2020-01-30 11:38:57,596 WARNING logger.py:130 -- Couldn't import TensorFlow - disabling TensorBoard logging.
2020-01-30 11:38:57,607 WARNING logger.py:224 -- Could not instantiate <class 'ray.tune.logger.TFLogger'> - skipping.
(pid=4389) [2020-01-30 11:38:58,297 PID:4389 INFO logger.py info] Running sessions
(pid=4388) [2020-01-30 11:38:58,292 PID:4388 INFO logger.py info] Running sessions
(pid=4388) terminate called after throwing an instance of 'c10::Error'
(pid=4388) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4388) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcf770dedc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4388) frame #1: <unknown function> + 0xca67 (0x7fcf6f2daa67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4388) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcf6f9fbb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4388) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcfa636128a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4388) frame #4: <unknown function> + 0xc8421 (0x7fcfbb3bd421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4388) frame #5: <unknown function> + 0x76db (0x7fcfc0c466db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4388) frame #6: clone + 0x3f (0x7fcfc096f88f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4388)
(pid=4388) Fatal Python error: Aborted
(pid=4388)
(pid=4388) Stack (most recent call first):
(pid=4389) [2020-01-30 11:38:58,326 PID:4456 INFO openai.py __init__] OpenAIEnv:
(pid=4389) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4389) - eval_frequency = 2000
(pid=4389) - log_frequency = 10000
(pid=4389) - frame_op = None
(pid=4389) - frame_op_len = None
(pid=4389) - image_downsize = (84, 84)
(pid=4389) - normalize_state = False
(pid=4389) - reward_scale = None
(pid=4389) - num_envs = 1
(pid=4389) - name = CartPole-v0
(pid=4389) - max_t = 200
(pid=4389) - max_frame = 100000
(pid=4389) - to_render = False
(pid=4389) - is_venv = False
(pid=4389) - clock_speed = 1
(pid=4389) - clock = <slm_lab.env.base.Clock object at 0x7fcc1a023d30>
(pid=4389) - done = False
(pid=4389) - total_reward = nan
(pid=4389) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4389) - observation_space = Box(4,)
(pid=4389) - action_space = Discrete(2)
(pid=4389) - observable_dim = {'state': 4}
(pid=4389) - action_dim = 2
(pid=4389) - is_discrete = True
(pid=4389) [2020-01-30 11:38:58,327 PID:4453 INFO openai.py __init__] OpenAIEnv:
(pid=4389) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4389) - eval_frequency = 2000
(pid=4389) - log_frequency = 10000
(pid=4389) - frame_op = None
(pid=4389) - frame_op_len = None
(pid=4389) - image_downsize = (84, 84)
(pid=4389) - normalize_state = False
(pid=4389) - reward_scale = None
(pid=4389) - num_envs = 1
(pid=4389) - name = CartPole-v0
(pid=4389) - max_t = 200
(pid=4389) - max_frame = 100000
(pid=4389) - to_render = False
(pid=4389) - is_venv = False
(pid=4389) - clock_speed = 1
(pid=4389) - clock = <slm_lab.env.base.Clock object at 0x7fcc1a023d30>
(pid=4389) - done = False
(pid=4389) - total_reward = nan
(pid=4389) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4389) - observation_space = Box(4,)
(pid=4389) - action_space = Discrete(2)
(pid=4389) - observable_dim = {'state': 4}
(pid=4389) - action_dim = 2
(pid=4389) - is_discrete = True
(pid=4389) [2020-01-30 11:38:58,328 PID:4450 INFO openai.py __init__] OpenAIEnv:
(pid=4389) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4389) - eval_frequency = 2000
(pid=4389) - log_frequency = 10000
(pid=4389) - frame_op = None
(pid=4389) - frame_op_len = None
(pid=4389) - image_downsize = (84, 84)
(pid=4389) - normalize_state = False
(pid=4389) - reward_scale = None
(pid=4389) - num_envs = 1
(pid=4389) - name = CartPole-v0
(pid=4389) - max_t = 200
(pid=4389) - max_frame = 100000
(pid=4389) - to_render = False
(pid=4389) - is_venv = False
(pid=4389) - clock_speed = 1
(pid=4389) - clock = <slm_lab.env.base.Clock object at 0x7fcc1a023d30>
(pid=4389) - done = False
(pid=4389) - total_reward = nan
(pid=4389) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4389) - observation_space = Box(4,)
(pid=4389) - action_space = Discrete(2)
(pid=4389) - observable_dim = {'state': 4}
(pid=4389) - action_dim = 2
(pid=4389) - is_discrete = True
(pid=4389) [2020-01-30 11:38:58,335 PID:4458 INFO openai.py __init__] OpenAIEnv:
(pid=4389) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4389) - eval_frequency = 2000
(pid=4389) - log_frequency = 10000
(pid=4389) - frame_op = None
(pid=4389) - frame_op_len = None
(pid=4389) - image_downsize = (84, 84)
(pid=4389) - normalize_state = False
(pid=4389) - reward_scale = None
(pid=4389) - num_envs = 1
(pid=4389) - name = CartPole-v0
(pid=4389) - max_t = 200
(pid=4389) - max_frame = 100000
(pid=4389) - to_render = False
(pid=4389) - is_venv = False
(pid=4389) - clock_speed = 1
(pid=4389) - clock = <slm_lab.env.base.Clock object at 0x7fcc1a023d30>
(pid=4389) - done = False
(pid=4389) - total_reward = nan
(pid=4389) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4389) - observation_space = Box(4,)
(pid=4389) - action_space = Discrete(2)
(pid=4389) - observable_dim = {'state': 4}
(pid=4389) - action_dim = 2
(pid=4389) - is_discrete = True
(pid=4388) [2020-01-30 11:38:58,313 PID:4440 INFO openai.py __init__] OpenAIEnv:
(pid=4388) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4388) - eval_frequency = 2000
(pid=4388) - log_frequency = 10000
(pid=4388) - frame_op = None
(pid=4388) - frame_op_len = None
(pid=4388) - image_downsize = (84, 84)
(pid=4388) - normalize_state = False
(pid=4388) - reward_scale = None
(pid=4388) - num_envs = 1
(pid=4388) - name = CartPole-v0
(pid=4388) - max_t = 200
(pid=4388) - max_frame = 100000
(pid=4388) - to_render = False
(pid=4388) - is_venv = False
(pid=4388) - clock_speed = 1
(pid=4388) - clock = <slm_lab.env.base.Clock object at 0x7fce28f7fcf8>
(pid=4388) - done = False
(pid=4388) - total_reward = nan
(pid=4388) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4388) - observation_space = Box(4,)
(pid=4388) - action_space = Discrete(2)
(pid=4388) - observable_dim = {'state': 4}
(pid=4388) - action_dim = 2
(pid=4388) - is_discrete = True
(pid=4388) [2020-01-30 11:38:58,318 PID:4445 INFO openai.py __init__] OpenAIEnv:
(pid=4388) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4388) - eval_frequency = 2000
(pid=4388) - log_frequency = 10000
(pid=4388) - frame_op = None
(pid=4388) - frame_op_len = None
(pid=4388) - image_downsize = (84, 84)
(pid=4388) - normalize_state = False
(pid=4388) - reward_scale = None
(pid=4388) - num_envs = 1
(pid=4388) - name = CartPole-v0
(pid=4388) - max_t = 200
(pid=4388) - max_frame = 100000
(pid=4388) - to_render = False
(pid=4388) - is_venv = False
(pid=4388) - clock_speed = 1
(pid=4388) - clock = <slm_lab.env.base.Clock object at 0x7fce28f7fcf8>
(pid=4388) - done = False
(pid=4388) - total_reward = nan
(pid=4388) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4388) - observation_space = Box(4,)
(pid=4388) - action_space = Discrete(2)
(pid=4388) - observable_dim = {'state': 4}
(pid=4388) - action_dim = 2
(pid=4388) - is_discrete = True
(pid=4388) [2020-01-30 11:38:58,319 PID:4449 INFO openai.py __init__] OpenAIEnv:
(pid=4388) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4388) - eval_frequency = 2000
(pid=4388) - log_frequency = 10000
(pid=4388) - frame_op = None
(pid=4388) - frame_op_len = None
(pid=4388) - image_downsize = (84, 84)
(pid=4388) - normalize_state = False
(pid=4388) - reward_scale = None
(pid=4388) - num_envs = 1
(pid=4388) - name = CartPole-v0
(pid=4388) - max_t = 200
(pid=4388) - max_frame = 100000
(pid=4388) - to_render = False
(pid=4388) - is_venv = False
(pid=4388) - clock_speed = 1
(pid=4388) - clock = <slm_lab.env.base.Clock object at 0x7fce28f7fcf8>
(pid=4388) - done = False
(pid=4388) - total_reward = nan
(pid=4388) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4388) - observation_space = Box(4,)
(pid=4388) - action_space = Discrete(2)
(pid=4388) - observable_dim = {'state': 4}
(pid=4388) - action_dim = 2
(pid=4388) - is_discrete = True
(pid=4388) [2020-01-30 11:38:58,323 PID:4452 INFO openai.py __init__] OpenAIEnv:
(pid=4388) - env_spec = {'max_frame': 100000, 'max_t': None, 'name': 'CartPole-v0'}
(pid=4388) - eval_frequency = 2000
(pid=4388) - log_frequency = 10000
(pid=4388) - frame_op = None
(pid=4388) - frame_op_len = None
(pid=4388) - image_downsize = (84, 84)
(pid=4388) - normalize_state = False
(pid=4388) - reward_scale = None
(pid=4388) - num_envs = 1
(pid=4388) - name = CartPole-v0
(pid=4388) - max_t = 200
(pid=4388) - max_frame = 100000
(pid=4388) - to_render = False
(pid=4388) - is_venv = False
(pid=4388) - clock_speed = 1
(pid=4388) - clock = <slm_lab.env.base.Clock object at 0x7fce28f7fcf8>
(pid=4388) - done = False
(pid=4388) - total_reward = nan
(pid=4388) - u_env = <TrackReward<TimeLimit<CartPoleEnv<CartPole-v0>>>>
(pid=4388) - observation_space = Box(4,)
(pid=4388) - action_space = Discrete(2)
(pid=4388) - observable_dim = {'state': 4}
(pid=4388) - action_dim = 2
(pid=4388) - is_discrete = True
(pid=4389) [2020-01-30 11:38:58,339 PID:4453 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4389) [2020-01-30 11:38:58,340 PID:4450 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4389) [2020-01-30 11:38:58,343 PID:4456 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4389) [2020-01-30 11:38:58,345 PID:4450 INFO base.py __init__][2020-01-30 11:38:58,345 PID:4453 INFO base.py __init__] Reinforce:
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bddcc0>
(pid=4389) - algorithm_spec = {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1}
(pid=4389) - name = Reinforce
(pid=4389) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4389) - net_spec = {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bddcc0>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56cc0>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bcb710>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10bddd68>"
(pid=4389) }
(pid=4389) - action_pdtype = default
(pid=4389) - action_policy = <function default at 0x7fcc21560620>
(pid=4389) - center_return = False
(pid=4389) - explore_var_spec = None
(pid=4389) - entropy_coef_spec = {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01}
(pid=4389) - policy_loss_coef = 1.0
(pid=4389) - gamma = 0.99
(pid=4389) - training_frequency = 1
(pid=4389) - to_train = 0
(pid=4389) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10bddd30>
(pid=4389) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10bdda20>
(pid=4389) - net = MLPNet(
(pid=4389) (model): Sequential(
(pid=4389) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4389) (1): SELU()
(pid=4389) )
(pid=4389) (model_tail): Sequential(
(pid=4389) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4389) )
(pid=4389) (loss_fn): MSELoss()
(pid=4389) )
(pid=4389) - net_names = ['net']
(pid=4389) - optim = Adam (
(pid=4389) Parameter Group 0
(pid=4389) amsgrad: False
(pid=4389) betas: (0.9, 0.999)
(pid=4389) eps: 1e-08
(pid=4389) lr: 0.002
(pid=4389) weight_decay: 0
(pid=4389) )
(pid=4389) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fcc10ba20b8>
(pid=4389) - global_net = None
(pid=4389) Reinforce:
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bdddd8>
(pid=4389) - algorithm_spec = {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) [2020-01-30 11:38:58,330 PID:4445 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4388) [2020-01-30 11:38:58,330 PID:4449 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4388) [2020-01-30 11:38:58,335 PID:4452 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4388) [2020-01-30 11:38:58,335 PID:4449 INFO base.py __init__] Reinforce:
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e097f60>
(pid=4388) - algorithm_spec = {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1}
(pid=4388) - name = Reinforce
(pid=4388) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4388) - net_spec = {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e097f60>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044eb8>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e097fd0>"
(pid=4388) }
(pid=4388) - action_pdtype = default
(pid=4388) - action_policy = <function default at 0x7fce304ad620>
(pid=4388) - center_return = True
(pid=4388) - explore_var_spec = None
(pid=4388) - entropy_coef_spec = {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01}
(pid=4388) - policy_loss_coef = 1.0
(pid=4388) - gamma = 0.99
(pid=4388) - training_frequency = 1
(pid=4388) - to_train = 0
(pid=4388) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e097c88>
(pid=4388) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e083940>
(pid=4388) - net = MLPNet(
(pid=4388) (model): Sequential(
(pid=4388) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4388) (1): SELU()
(pid=4388) )
(pid=4388) (model_tail): Sequential(
(pid=4388) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4388) )
(pid=4388) (loss_fn): MSELoss()
(pid=4388) )
(pid=4388) - net_names = ['net']
(pid=4388) - optim = Adam (
(pid=4388) Parameter Group 0
(pid=4388) amsgrad: False
(pid=4388) betas: (0.9, 0.999)
(pid=4388) eps: 1e-08
(pid=4388) lr: 0.002
(pid=4388) weight_decay: 0
(pid=4388) )
(pid=4388) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fce0e0562e8>
(pid=4388) - global_net = None
(pid=4388) [2020-01-30 11:38:58,335 PID:4445 INFO base.py __init__] Reinforce:
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e098da0>
(pid=4388) - algorithm_spec = {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1}
(pid=4389) - name = Reinforce
(pid=4389) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4389) - net_spec = {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bdddd8>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56da0>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bc5828>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10bdde80>"
(pid=4389) }
(pid=4389) - action_pdtype = default
(pid=4389) - action_policy = <function default at 0x7fcc21560620>
(pid=4389) - center_return = False
(pid=4389) - explore_var_spec = None
(pid=4389) - entropy_coef_spec = {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01}
(pid=4389) - policy_loss_coef = 1.0
(pid=4389) - gamma = 0.99
(pid=4389) - training_frequency = 1
(pid=4389) - to_train = 0
(pid=4389) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10bdde48>
(pid=4389) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10bddb38>
(pid=4389) - net = MLPNet(
(pid=4389) (model): Sequential(
(pid=4389) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4389) (1): SELU()
(pid=4389) )
(pid=4389) (model_tail): Sequential(
(pid=4389) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4389) )
(pid=4389) (loss_fn): MSELoss()
(pid=4389) )
(pid=4389) - net_names = ['net']
(pid=4389) - optim = Adam (
(pid=4389) Parameter Group 0
(pid=4389) amsgrad: False
(pid=4389) betas: (0.9, 0.999)
(pid=4389) eps: 1e-08
(pid=4389) lr: 0.002
(pid=4389) weight_decay: 0
(pid=4389) )
(pid=4389) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fcc10ba11d0>
(pid=4389) - global_net = None
(pid=4389) [2020-01-30 11:38:58,347 PID:4453 INFO __init__.py __init__][2020-01-30 11:38:58,347 PID:4450 INFO __init__.py __init__] Agent:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1},
(pid=4389) 'memory': {'name': 'OnPolicyReplay'},
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1}
(pid=4388) - name = Reinforce
(pid=4388) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4388) - net_spec = {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e098da0>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044da0>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e098e48>"
(pid=4388) }
(pid=4388) - action_pdtype = default
(pid=4388) - action_policy = <function default at 0x7fce304ad620>
(pid=4388) - center_return = True
(pid=4388) - explore_var_spec = None
(pid=4388) - entropy_coef_spec = {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01}
(pid=4388) - policy_loss_coef = 1.0
(pid=4388) - gamma = 0.99
(pid=4388) - training_frequency = 1
(pid=4388) - to_train = 0
(pid=4388) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e098e10>
(pid=4388) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e098f28>
(pid=4388) - net = MLPNet(
(pid=4388) (model): Sequential(
(pid=4388) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4388) (1): SELU()
(pid=4388) )
(pid=4388) (model_tail): Sequential(
(pid=4388) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4388) )
(pid=4388) (loss_fn): MSELoss()
(pid=4388) )
(pid=4388) - net_names = ['net']
(pid=4388) - optim = Adam (
(pid=4388) Parameter Group 0
(pid=4388) amsgrad: False
(pid=4388) betas: (0.9, 0.999)
(pid=4388) eps: 1e-08
(pid=4388) lr: 0.002
(pid=4388) weight_decay: 0
(pid=4388) )
(pid=4388) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fce0e05b1d0>
(pid=4388) - global_net = None
(pid=4388) [2020-01-30 11:38:58,336 PID:4449 INFO __init__.py __init__] Agent:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1},
(pid=4388) 'memory': {'name': 'OnPolicyReplay'},
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'net': {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}}
(pid=4389) - name = Reinforce
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bdddd8>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56da0>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bc5828>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10bdde80>"
(pid=4389) }
(pid=4389) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fcc10bdde10>
(pid=4389) Agent:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1},
(pid=4389) 'memory': {'name': 'OnPolicyReplay'},
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'net': {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}}
(pid=4389) - name = Reinforce
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bddcc0>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56cc0>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bcb710>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10bddd68>"
(pid=4389) }
(pid=4389) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fcc10bddcf8>
(pid=4389) [2020-01-30 11:38:58,347 PID:4458 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search[2020-01-30 11:38:58,347 PID:4450 INFO logger.py info][2020-01-30 11:38:58,347 PID:4453 INFO logger.py info]
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'net': {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}}
(pid=4388) - name = Reinforce
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e097f60>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044eb8>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e097fd0>"
(pid=4388) }
(pid=4388) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fce0e097f98>
(pid=4388) [2020-01-30 11:38:58,337 PID:4449 INFO logger.py info] Session:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - index = 2
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e097f60>
(pid=4388) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044eb8>
(pid=4388) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044eb8>
(pid=4388) [2020-01-30 11:38:58,337 PID:4449 INFO logger.py info] Running RL loop for trial 0 session 2
(pid=4388) [2020-01-30 11:38:58,337 PID:4445 INFO __init__.py __init__] Agent:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1},
(pid=4388) 'memory': {'name': 'OnPolicyReplay'},
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'net': {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}}
(pid=4388) - name = Reinforce
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e098da0>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044da0>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4389) Session:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - index = 0
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bddcc0>
(pid=4389) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56cc0>
(pid=4389) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56cc0> Session:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - index = 1
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bdddd8>
(pid=4389) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56da0>
(pid=4389) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56da0>
(pid=4389)
(pid=4389) [2020-01-30 11:38:58,347 PID:4450 INFO logger.py info] Running RL loop for trial 1 session 0[2020-01-30 11:38:58,347 PID:4453 INFO logger.py info]
(pid=4389) Running RL loop for trial 1 session 1
(pid=4389) [2020-01-30 11:38:58,348 PID:4456 INFO base.py __init__] Reinforce:
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bdcf28>
(pid=4389) - algorithm_spec = {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1}
(pid=4389) - name = Reinforce
(pid=4389) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4389) - net_spec = {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bdcf28>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56eb8>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bc7940>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10bdcfd0>"
(pid=4389) }
(pid=4389) - action_pdtype = default
(pid=4389) - action_policy = <function default at 0x7fcc21560620>
(pid=4389) - center_return = False
(pid=4389) - explore_var_spec = None
(pid=4389) - entropy_coef_spec = {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01}
(pid=4389) - policy_loss_coef = 1.0
(pid=4389) - gamma = 0.99
(pid=4389) - training_frequency = 1
(pid=4389) - to_train = 0
(pid=4389) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10bdcf98>
(pid=4389) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10bdcc50>
(pid=4389) - net = MLPNet(
(pid=4389) (model): Sequential(
(pid=4389) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4389) (1): SELU()
(pid=4389) )
(pid=4389) (model_tail): Sequential(
(pid=4389) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4389) )
(pid=4389) (loss_fn): MSELoss()
(pid=4389) )
(pid=4389) - net_names = ['net']
(pid=4389) - optim = Adam (
(pid=4389) Parameter Group 0
(pid=4389) amsgrad: False
(pid=4389) betas: (0.9, 0.999)
(pid=4389) eps: 1e-08
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e098e48>"
(pid=4388) }
(pid=4388) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fce0e098dd8>
(pid=4388) [2020-01-30 11:38:58,338 PID:4445 INFO logger.py info] Session:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - index = 1
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e098da0>
(pid=4388) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044da0>
(pid=4388) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044da0>
(pid=4388) [2020-01-30 11:38:58,338 PID:4445 INFO logger.py info] Running RL loop for trial 0 session 1
(pid=4388) [2020-01-30 11:38:58,340 PID:4449 INFO __init__.py log_summary] Trial 0 session 2 reinforce_baseline_cartpole_t0_s2 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4388) [2020-01-30 11:38:58,340 PID:4452 INFO base.py __init__] Reinforce:
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e082a58>
(pid=4388) - algorithm_spec = {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1}
(pid=4388) - name = Reinforce
(pid=4388) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4388) - net_spec = {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e082a58>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044fd0>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e0540b8>"
(pid=4388) }
(pid=4388) - action_pdtype = default
(pid=4388) - action_policy = <function default at 0x7fce304ad620>
(pid=4388) - center_return = True
(pid=4388) - explore_var_spec = None
(pid=4388) - entropy_coef_spec = {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01}
(pid=4388) - policy_loss_coef = 1.0
(pid=4388) - gamma = 0.99
(pid=4388) - training_frequency = 1
(pid=4388) - to_train = 0
(pid=4388) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e054080>
(pid=4388) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e054160>
(pid=4388) - net = MLPNet(
(pid=4388) (model): Sequential(
(pid=4388) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4388) (1): SELU()
(pid=4388) )
(pid=4388) (model_tail): Sequential(
(pid=4388) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4388) )
(pid=4388) (loss_fn): MSELoss()
(pid=4388) )
(pid=4388) - net_names = ['net']
(pid=4388) - optim = Adam (
(pid=4388) Parameter Group 0
(pid=4388) amsgrad: False
(pid=4388) betas: (0.9, 0.999)
(pid=4388) eps: 1e-08
(pid=4389) lr: 0.002
(pid=4389) weight_decay: 0
(pid=4389) )
(pid=4389) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fcc10b9a2e8>
(pid=4389) - global_net = None
(pid=4389) [2020-01-30 11:38:58,350 PID:4456 INFO __init__.py __init__] Agent:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1},
(pid=4389) 'memory': {'name': 'OnPolicyReplay'},
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'net': {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}}
(pid=4389) - name = Reinforce
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bdcf28>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56eb8>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bc7940>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10bdcfd0>"
(pid=4389) }
(pid=4389) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fcc10bdcf60>
(pid=4389) [2020-01-30 11:38:58,351 PID:4456 INFO logger.py info] Session:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - index = 2
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bdcf28>
(pid=4389) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56eb8>
(pid=4389) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56eb8>
(pid=4389) [2020-01-30 11:38:58,351 PID:4456 INFO logger.py info] Running RL loop for trial 1 session 2
(pid=4389) [2020-01-30 11:38:58,351 PID:4450 INFO __init__.py log_summary] Trial 1 session 0 reinforce_baseline_cartpole_t1_s0 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4389) [2020-01-30 11:38:58,351 PID:4453 INFO __init__.py log_summary] Trial 1 session 1 reinforce_baseline_cartpole_t1_s1 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4389) [2020-01-30 11:38:58,352 PID:4458 INFO base.py __init__] Reinforce:
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bddd68>
(pid=4389) - algorithm_spec = {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1}
(pid=4389) - name = Reinforce
(pid=4389) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4389) - net_spec = {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bddd68>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56fd0>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4388) lr: 0.002
(pid=4388) weight_decay: 0
(pid=4388) )
(pid=4388) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fce0e054400>
(pid=4388) - global_net = None
(pid=4388) [2020-01-30 11:38:58,342 PID:4445 INFO __init__.py log_summary] Trial 0 session 1 reinforce_baseline_cartpole_t0_s1 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4388) [2020-01-30 11:38:58,342 PID:4452 INFO __init__.py __init__] Agent:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1},
(pid=4388) 'memory': {'name': 'OnPolicyReplay'},
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'net': {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}}
(pid=4388) - name = Reinforce
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e082a58>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044fd0>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e0540b8>"
(pid=4388) }
(pid=4388) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fce0e054048>
(pid=4388) [2020-01-30 11:38:58,342 PID:4452 INFO logger.py info] Session:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - index = 3
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e082a58>
(pid=4388) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044fd0>
(pid=4388) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044fd0>
(pid=4388) [2020-01-30 11:38:58,342 PID:4452 INFO logger.py info] Running RL loop for trial 0 session 3
(pid=4388) [2020-01-30 11:38:58,343 PID:4440 INFO base.py post_init_nets] Initialized algorithm models for lab_mode: search
(pid=4388) [2020-01-30 11:38:58,346 PID:4452 INFO __init__.py log_summary] Trial 0 session 3 reinforce_baseline_cartpole_t0_s3 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4388) [2020-01-30 11:38:58,348 PID:4440 INFO base.py __init__] Reinforce:
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e09ac88>
(pid=4388) - algorithm_spec = {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1}
(pid=4388) - name = Reinforce
(pid=4388) - memory_spec = {'name': 'OnPolicyReplay'}
(pid=4388) - net_spec = {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e09ac88>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044cc0>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) terminate called after throwing an instance of 'c10::Error'
(pid=4388) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4388) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcf770dedc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4388) frame #1: <unknown function> + 0xca67 (0x7fcf6f2daa67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4388) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcf6f9fbb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4388) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcfa636128a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4388) frame #4: <unknown function> + 0xc8421 (0x7fcfbb3bd421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4388) frame #5: <unknown function> + 0x76db (0x7fcfc0c466db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4388) frame #6: clone + 0x3f (0x7fcfc096f88f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4388)
(pid=4388) Fatal Python error: Aborted
(pid=4388)
(pid=4388) Stack (most recent call first):
(pid=4388) terminate called after throwing an instance of 'c10::Error'
(pid=4388) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4388) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcf770dedc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4388) frame #1: <unknown function> + 0xca67 (0x7fcf6f2daa67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4388) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcf6f9fbb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4388) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcfa636128a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4388) frame #4: <unknown function> + 0xc8421 (0x7fcfbb3bd421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4388) frame #5: <unknown function> + 0x76db (0x7fcfc0c466db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4388) frame #6: clone + 0x3f (0x7fcfc096f88f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4388)
(pid=4388) Fatal Python error: Aborted
(pid=4388)
(pid=4388) Stack (most recent call first):
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bc6a58>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10b9a0b8>"
(pid=4389) }
(pid=4389) - action_pdtype = default
(pid=4389) - action_policy = <function default at 0x7fcc21560620>
(pid=4389) - center_return = False
(pid=4389) - explore_var_spec = None
(pid=4389) - entropy_coef_spec = {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01}
(pid=4389) - policy_loss_coef = 1.0
(pid=4389) - gamma = 0.99
(pid=4389) - training_frequency = 1
(pid=4389) - to_train = 0
(pid=4389) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10b9a080>
(pid=4389) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fcc10b9a160>
(pid=4389) - net = MLPNet(
(pid=4389) (model): Sequential(
(pid=4389) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4389) (1): SELU()
(pid=4389) )
(pid=4389) (model_tail): Sequential(
(pid=4389) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4389) )
(pid=4389) (loss_fn): MSELoss()
(pid=4389) )
(pid=4389) - net_names = ['net']
(pid=4389) - optim = Adam (
(pid=4389) Parameter Group 0
(pid=4389) amsgrad: False
(pid=4389) betas: (0.9, 0.999)
(pid=4389) eps: 1e-08
(pid=4389) lr: 0.002
(pid=4389) weight_decay: 0
(pid=4389) )
(pid=4389) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fcc10b9a400>
(pid=4389) - global_net = None
(pid=4389) [2020-01-30 11:38:58,354 PID:4458 INFO __init__.py __init__] Agent:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4389) 'action_policy': 'default',
(pid=4389) 'center_return': False,
(pid=4389) 'entropy_coef_spec': {'end_step': 20000,
(pid=4389) 'end_val': 0.001,
(pid=4389) 'name': 'linear_decay',
(pid=4389) 'start_step': 0,
(pid=4389) 'start_val': 0.01},
(pid=4389) 'explore_var_spec': None,
(pid=4389) 'gamma': 0.99,
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'training_frequency': 1},
(pid=4389) 'memory': {'name': 'OnPolicyReplay'},
(pid=4389) 'name': 'Reinforce',
(pid=4389) 'net': {'clip_grad_val': None,
(pid=4389) 'hid_layers': [64],
(pid=4389) 'hid_layers_activation': 'selu',
(pid=4389) 'loss_spec': {'name': 'MSELoss'},
(pid=4389) 'lr_scheduler_spec': None,
(pid=4389) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4389) 'type': 'MLPNet'}}
(pid=4389) - name = Reinforce
(pid=4389) - body = body: {
(pid=4389) "agent": "<slm_lab.agent.Agent object at 0x7fcc10bddd68>",
(pid=4389) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56fd0>",
(pid=4389) "a": 0,
(pid=4389) "e": 0,
(pid=4389) "b": 0,
(pid=4389) "aeb": "(0, 0, 0)",
(pid=4389) "explore_var": NaN,
(pid=4389) "entropy_coef": 0.01,
(pid=4389) "loss": NaN,
(pid=4389) "mean_entropy": NaN,
(pid=4389) "mean_grad_norm": NaN,
(pid=4389) "best_total_reward_ma": -Infinity,
(pid=4389) "total_reward_ma": NaN,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e09ad30>"
(pid=4388) }
(pid=4388) - action_pdtype = default
(pid=4388) - action_policy = <function default at 0x7fce304ad620>
(pid=4388) - center_return = True
(pid=4388) - explore_var_spec = None
(pid=4388) - entropy_coef_spec = {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01}
(pid=4388) - policy_loss_coef = 1.0
(pid=4388) - gamma = 0.99
(pid=4388) - training_frequency = 1
(pid=4388) - to_train = 0
(pid=4388) - explore_var_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e09acf8>
(pid=4388) - entropy_coef_scheduler = <slm_lab.agent.algorithm.policy_util.VarScheduler object at 0x7fce0e09ae10>
(pid=4388) - net = MLPNet(
(pid=4388) (model): Sequential(
(pid=4388) (0): Linear(in_features=4, out_features=64, bias=True)
(pid=4388) (1): SELU()
(pid=4388) )
(pid=4388) (model_tail): Sequential(
(pid=4388) (0): Linear(in_features=64, out_features=2, bias=True)
(pid=4388) )
(pid=4388) (loss_fn): MSELoss()
(pid=4388) )
(pid=4388) - net_names = ['net']
(pid=4388) - optim = Adam (
(pid=4388) Parameter Group 0
(pid=4388) amsgrad: False
(pid=4388) betas: (0.9, 0.999)
(pid=4388) eps: 1e-08
(pid=4388) lr: 0.002
(pid=4388) weight_decay: 0
(pid=4388) )
(pid=4388) - lr_scheduler = <slm_lab.agent.net.net_util.NoOpLRScheduler object at 0x7fce0e05c0b8>
(pid=4388) - global_net = None
(pid=4388) [2020-01-30 11:38:58,350 PID:4440 INFO __init__.py __init__] Agent:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - agent_spec = {'algorithm': {'action_pdtype': 'default',
(pid=4388) 'action_policy': 'default',
(pid=4388) 'center_return': True,
(pid=4388) 'entropy_coef_spec': {'end_step': 20000,
(pid=4388) 'end_val': 0.001,
(pid=4388) 'name': 'linear_decay',
(pid=4388) 'start_step': 0,
(pid=4388) 'start_val': 0.01},
(pid=4388) 'explore_var_spec': None,
(pid=4388) 'gamma': 0.99,
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'training_frequency': 1},
(pid=4388) 'memory': {'name': 'OnPolicyReplay'},
(pid=4388) 'name': 'Reinforce',
(pid=4388) 'net': {'clip_grad_val': None,
(pid=4388) 'hid_layers': [64],
(pid=4388) 'hid_layers_activation': 'selu',
(pid=4388) 'loss_spec': {'name': 'MSELoss'},
(pid=4388) 'lr_scheduler_spec': None,
(pid=4388) 'optim_spec': {'lr': 0.002, 'name': 'Adam'},
(pid=4388) 'type': 'MLPNet'}}
(pid=4388) - name = Reinforce
(pid=4388) - body = body: {
(pid=4388) "agent": "<slm_lab.agent.Agent object at 0x7fce0e09ac88>",
(pid=4388) "env": "<slm_lab.env.openai.OpenAIEnv object at 0x7fce28044cc0>",
(pid=4388) "a": 0,
(pid=4388) "e": 0,
(pid=4388) "b": 0,
(pid=4388) "aeb": "(0, 0, 0)",
(pid=4388) "explore_var": NaN,
(pid=4388) "entropy_coef": 0.01,
(pid=4388) "loss": NaN,
(pid=4388) "mean_entropy": NaN,
(pid=4388) "mean_grad_norm": NaN,
(pid=4388) "best_total_reward_ma": -Infinity,
(pid=4389) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4389) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fcc10bc6a58>",
(pid=4389) "tb_actions": [],
(pid=4389) "tb_tracker": {},
(pid=4389) "observation_space": "Box(4,)",
(pid=4389) "action_space": "Discrete(2)",
(pid=4389) "observable_dim": {
(pid=4389) "state": 4
(pid=4389) },
(pid=4389) "state_dim": 4,
(pid=4389) "action_dim": 2,
(pid=4389) "is_discrete": true,
(pid=4389) "action_type": "discrete",
(pid=4389) "action_pdtype": "Categorical",
(pid=4389) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4389) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fcc10b9a0b8>"
(pid=4389) }
(pid=4389) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fcc10b9a048>
(pid=4389) [2020-01-30 11:38:58,354 PID:4458 INFO logger.py info] Session:
(pid=4389) - spec = reinforce_baseline_cartpole
(pid=4389) - index = 3
(pid=4389) - agent = <slm_lab.agent.Agent object at 0x7fcc10bddd68>
(pid=4389) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56fd0>
(pid=4389) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fcc10c56fd0>
(pid=4389) [2020-01-30 11:38:58,354 PID:4458 INFO logger.py info] Running RL loop for trial 1 session 3
(pid=4389) [2020-01-30 11:38:58,355 PID:4456 INFO __init__.py log_summary] Trial 1 session 2 reinforce_baseline_cartpole_t1_s2 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4389) [2020-01-30 11:38:58,358 PID:4458 INFO __init__.py log_summary] Trial 1 session 3 reinforce_baseline_cartpole_t1_s3 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4388) "total_reward_ma": NaN,
(pid=4388) "train_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "eval_df": "Empty DataFrame\nColumns: [epi, t, wall_t, opt_step, frame, fps, total_reward, total_reward_ma, loss, lr, explore_var, entropy_coef, entropy, grad_norm]\nIndex: []",
(pid=4388) "tb_writer": "<torch.utils.tensorboard.writer.SummaryWriter object at 0x7fce2b00a780>",
(pid=4388) "tb_actions": [],
(pid=4388) "tb_tracker": {},
(pid=4388) "observation_space": "Box(4,)",
(pid=4388) "action_space": "Discrete(2)",
(pid=4388) "observable_dim": {
(pid=4388) "state": 4
(pid=4388) },
(pid=4388) "state_dim": 4,
(pid=4388) "action_dim": 2,
(pid=4388) "is_discrete": true,
(pid=4388) "action_type": "discrete",
(pid=4388) "action_pdtype": "Categorical",
(pid=4388) "ActionPD": "<class 'torch.distributions.categorical.Categorical'>",
(pid=4388) "memory": "<slm_lab.agent.memory.onpolicy.OnPolicyReplay object at 0x7fce0e09ad30>"
(pid=4388) }
(pid=4388) - algorithm = <slm_lab.agent.algorithm.reinforce.Reinforce object at 0x7fce0e09acc0>
(pid=4388) [2020-01-30 11:38:58,350 PID:4440 INFO logger.py info] Session:
(pid=4388) - spec = reinforce_baseline_cartpole
(pid=4388) - index = 0
(pid=4388) - agent = <slm_lab.agent.Agent object at 0x7fce0e09ac88>
(pid=4388) - env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044cc0>
(pid=4388) - eval_env = <slm_lab.env.openai.OpenAIEnv object at 0x7fce28044cc0>
(pid=4388) [2020-01-30 11:38:58,350 PID:4440 INFO logger.py info] Running RL loop for trial 0 session 0
(pid=4388) [2020-01-30 11:38:58,354 PID:4440 INFO __init__.py log_summary] Trial 0 session 0 reinforce_baseline_cartpole_t0_s0 [train_df] epi: 0 t: 0 wall_t: 0 opt_step: 0 frame: 0 fps: 0 total_reward: nan total_reward_ma: nan loss: nan lr: 0.002 explore_var: nan entropy_coef: 0.01 entropy: nan grad_norm: nan
(pid=4388) terminate called after throwing an instance of 'c10::Error'
(pid=4388) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4388) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcf770dedc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4388) frame #1: <unknown function> + 0xca67 (0x7fcf6f2daa67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4388) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcf6f9fbb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4388) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcfa636128a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4388) frame #4: <unknown function> + 0xc8421 (0x7fcfbb3bd421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4388) frame #5: <unknown function> + 0x76db (0x7fcfc0c466db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4388) frame #6: clone + 0x3f (0x7fcfc096f88f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4388)
(pid=4388) Fatal Python error: Aborted
(pid=4388)
(pid=4388) Stack (most recent call first):
(pid=4389) terminate called after throwing an instance of 'c10::Error'
(pid=4389) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4389) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcd68190dc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4389) frame #1: <unknown function> + 0xca67 (0x7fcd6038ca67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4389) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcd60aadb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4389) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcd9741328a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4389) frame #4: <unknown function> + 0xc8421 (0x7fcdac471421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4389) frame #5: <unknown function> + 0x76db (0x7fcdb1cfa6db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4389) frame #6: clone + 0x3f (0x7fcdb1a2388f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4389)
(pid=4389) Fatal Python error: Aborted
(pid=4389)
(pid=4389) Stack (most recent call first):
(pid=4389) terminate called after throwing an instance of 'c10::Error'
(pid=4389) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4389) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcd68190dc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4389) frame #1: <unknown function> + 0xca67 (0x7fcd6038ca67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4389) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcd60aadb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4389) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcd9741328a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4389) frame #4: <unknown function> + 0xc8421 (0x7fcdac471421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4389) frame #5: <unknown function> + 0x76db (0x7fcdb1cfa6db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4389) frame #6: clone + 0x3f (0x7fcdb1a2388f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4389)
(pid=4389) Fatal Python error: Aborted
(pid=4389)
(pid=4389) Stack (most recent call first):
(pid=4389) terminate called after throwing an instance of 'c10::Error'
(pid=4389) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4389) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcd68190dc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4389) frame #1: <unknown function> + 0xca67 (0x7fcd6038ca67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4389) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcd60aadb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4389) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcd9741328a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4389) frame #4: <unknown function> + 0xc8421 (0x7fcdac471421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4389) frame #5: <unknown function> + 0x76db (0x7fcdb1cfa6db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4389) frame #6: clone + 0x3f (0x7fcdb1a2388f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4389)
(pid=4389) Fatal Python error: Aborted
(pid=4389)
(pid=4389) Stack (most recent call first):
(pid=4389) terminate called after throwing an instance of 'c10::Error'
(pid=4389) what(): CUDA error: initialization error (getDevice at /opt/conda/conda-bld/pytorch_1556653114079/work/c10/cuda/impl/CUDAGuardImpl.h:35)
(pid=4389) frame #0: c10::Error::Error(c10::SourceLocation, std::string const&) + 0x45 (0x7fcd68190dc5 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10.so)
(pid=4389) frame #1: <unknown function> + 0xca67 (0x7fcd6038ca67 in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libc10_cuda.so)
(pid=4389) frame #2: torch::autograd::Engine::thread_init(int) + 0x3ee (0x7fcd60aadb1e in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch.so.1)
(pid=4389) frame #3: torch::autograd::python::PythonEngine::thread_init(int) + 0x2a (0x7fcd9741328a in /home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/torch/lib/libtorch_python.so)
(pid=4389) frame #4: <unknown function> + 0xc8421 (0x7fcdac471421 in /home/joe/anaconda3/envs/lab/bin/../lib/libstdc++.so.6)
(pid=4389) frame #5: <unknown function> + 0x76db (0x7fcdb1cfa6db in /lib/x86_64-linux-gnu/libpthread.so.0)
(pid=4389) frame #6: clone + 0x3f (0x7fcdb1a2388f in /lib/x86_64-linux-gnu/libc.so.6)
(pid=4389)
(pid=4389) Fatal Python error: Aborted
(pid=4389)
(pid=4389) Stack (most recent call first):
(pid=4388) 2020-01-30 11:38:58,550 ERROR function_runner.py:96 -- Runner Thread raised error.
(pid=4388) Traceback (most recent call last):
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 90, in run
(pid=4388) self._entrypoint()
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 141, in entrypoint
(pid=4388) return self._trainable_func(config, self._status_reporter)
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 249, in _trainable_func
(pid=4388) output = train_func(config, reporter)
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/search.py", line 90, in ray_trainable
(pid=4388) metrics = Trial(spec).run()
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/control.py", line 181, in run
(pid=4388) metrics = analysis.analyze_trial(self.spec, session_metrics_list)
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 265, in analyze_trial
(pid=4388) trial_metrics = calc_trial_metrics(session_metrics_list, info_prepath)
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 187, in calc_trial_metrics
(pid=4388) frames = session_metrics_list[0]['local']['frames']
(pid=4388) IndexError: list index out of range
(pid=4388) Exception in thread Thread-1:
(pid=4388) Traceback (most recent call last):
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 90, in run
(pid=4388) self._entrypoint()
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 141, in entrypoint
(pid=4388) return self._trainable_func(config, self._status_reporter)
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 249, in _trainable_func
(pid=4388) output = train_func(config, reporter)
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/search.py", line 90, in ray_trainable
(pid=4388) metrics = Trial(spec).run()
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/control.py", line 181, in run
(pid=4388) metrics = analysis.analyze_trial(self.spec, session_metrics_list)
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 265, in analyze_trial
(pid=4388) trial_metrics = calc_trial_metrics(session_metrics_list, info_prepath)
(pid=4388) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 187, in calc_trial_metrics
(pid=4388) frames = session_metrics_list[0]['local']['frames']
(pid=4388) IndexError: list index out of range
(pid=4388)
(pid=4388) During handling of the above exception, another exception occurred:
(pid=4388)
(pid=4388) Traceback (most recent call last):
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/threading.py", line 917, in _bootstrap_inner
(pid=4388) self.run()
(pid=4388) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 102, in run
(pid=4388) err_tb = err_tb.format_exc()
(pid=4388) AttributeError: 'traceback' object has no attribute 'format_exc'
(pid=4388)
(pid=4389) 2020-01-30 11:38:58,570 ERROR function_runner.py:96 -- Runner Thread raised error.
(pid=4389) Traceback (most recent call last):
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 90, in run
(pid=4389) self._entrypoint()
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 141, in entrypoint
(pid=4389) return self._trainable_func(config, self._status_reporter)
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 249, in _trainable_func
(pid=4389) output = train_func(config, reporter)
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/search.py", line 90, in ray_trainable
(pid=4389) metrics = Trial(spec).run()
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/control.py", line 181, in run
(pid=4389) metrics = analysis.analyze_trial(self.spec, session_metrics_list)
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 265, in analyze_trial
(pid=4389) trial_metrics = calc_trial_metrics(session_metrics_list, info_prepath)
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 187, in calc_trial_metrics
(pid=4389) frames = session_metrics_list[0]['local']['frames']
(pid=4389) IndexError: list index out of range
(pid=4389) Exception in thread Thread-1:
(pid=4389) Traceback (most recent call last):
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 90, in run
(pid=4389) self._entrypoint()
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 141, in entrypoint
(pid=4389) return self._trainable_func(config, self._status_reporter)
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 249, in _trainable_func
(pid=4389) output = train_func(config, reporter)
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/search.py", line 90, in ray_trainable
(pid=4389) metrics = Trial(spec).run()
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/control.py", line 181, in run
(pid=4389) metrics = analysis.analyze_trial(self.spec, session_metrics_list)
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 265, in analyze_trial
(pid=4389) trial_metrics = calc_trial_metrics(session_metrics_list, info_prepath)
(pid=4389) File "/home/joe/SLM-Lab/slm_lab/experiment/analysis.py", line 187, in calc_trial_metrics
(pid=4389) frames = session_metrics_list[0]['local']['frames']
(pid=4389) IndexError: list index out of range
(pid=4389)
(pid=4389) During handling of the above exception, another exception occurred:
(pid=4389)
(pid=4389) Traceback (most recent call last):
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/threading.py", line 917, in _bootstrap_inner
(pid=4389) self.run()
(pid=4389) File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 102, in run
(pid=4389) err_tb = err_tb.format_exc()
(pid=4389) AttributeError: 'traceback' object has no attribute 'format_exc'
(pid=4389)
2020-01-30 11:38:59,690 ERROR trial_runner.py:497 -- Error processing event.
Traceback (most recent call last):
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/trial_runner.py", line 446, in _process_trial
result = self.trial_executor.fetch_result(trial)
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/ray_trial_executor.py", line 316, in fetch_result
result = ray.get(trial_future[0])
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/worker.py", line 2197, in get
raise value
ray.exceptions.RayTaskError: ray_worker (pid=4388, host=Gauss)
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/trainable.py", line 151, in train
result = self._train()
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 203, in _train
("Wrapped function ran until completion without reporting "
ray.tune.error.TuneError: Wrapped function ran until completion without reporting results or raising an exception.
2020-01-30 11:38:59,694 INFO ray_trial_executor.py:180 -- Destroying actor for trial ray_trainable_0_agent.0.algorithm.center_return=True,trial_index=0. If your trainable is slow to initialize, consider setting reuse_actors=True to reduce actor creation overheads.
2020-01-30 11:38:59,705 ERROR trial_runner.py:497 -- Error processing event.
Traceback (most recent call last):
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/trial_runner.py", line 446, in _process_trial
result = self.trial_executor.fetch_result(trial)
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/ray_trial_executor.py", line 316, in fetch_result
result = ray.get(trial_future[0])
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/worker.py", line 2197, in get
raise value
ray.exceptions.RayTaskError: ray_worker (pid=4389, host=Gauss)
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/trainable.py", line 151, in train
result = self._train()
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/function_runner.py", line 203, in _train
("Wrapped function ran until completion without reporting "
ray.tune.error.TuneError: Wrapped function ran until completion without reporting results or raising an exception.
2020-01-30 11:38:59,707 INFO ray_trial_executor.py:180 -- Destroying actor for trial ray_trainable_1_agent.0.algorithm.center_return=False,trial_index=1. If your trainable is slow to initialize, consider setting reuse_actors=True to reduce actor creation overheads.
== Status ==
Using FIFO scheduling algorithm.
Resources requested: 0/8 CPUs, 0/1 GPUs
Memory usage on this node: 2.5/16.7 GB
Result logdir: /home/joe/ray_results/reinforce_baseline_cartpole
Number of trials: 2 ({'ERROR': 2})
ERROR trials:
- ray_trainable_0_agent.0.algorithm.center_return=True,trial_index=0: ERROR, 1 failures: /home/joe/ray_results/reinforce_baseline_cartpole/ray_trainable_0_agent.0.algorithm.center_return=True,trial_index=0_2020-01-30_11-38-57n2qc80ke/error_2020-01-30_11-38-59.txt
- ray_trainable_1_agent.0.algorithm.center_return=False,trial_index=1: ERROR, 1 failures: /home/joe/ray_results/reinforce_baseline_cartpole/ray_trainable_1_agent.0.algorithm.center_return=False,trial_index=1_2020-01-30_11-38-57unqmlqvg/error_2020-01-30_11-38-59.txt
Traceback (most recent call last):
File "run_lab.py", line 80, in <module>
main()
File "run_lab.py", line 72, in main
read_spec_and_run(*args)
File "run_lab.py", line 56, in read_spec_and_run
run_spec(spec, lab_mode)
File "run_lab.py", line 35, in run_spec
Experiment(spec).run()
File "/home/joe/SLM-Lab/slm_lab/experiment/control.py", line 203, in run
trial_data_dict = search.run_ray_search(self.spec)
File "/home/joe/SLM-Lab/slm_lab/experiment/search.py", line 124, in run_ray_search
server_port=util.get_port(),
File "/home/joe/anaconda3/envs/lab/lib/python3.7/site-packages/ray/tune/tune.py", line 265, in run
raise TuneError("Trials did not complete", errored_trials)
ray.tune.error.TuneError: ('Trials did not complete', [ray_trainable_0_agent.0.algorithm.center_return=True,trial_index=0, ray_trainable_1_agent.0.algorithm.center_return=False,trial_index=1])
dependency
















![ERROR:buffer_manager.cc(488)] [.DisplayCompositor]GL ERROR :GL_INVALID_OPERATION : glBufferData: <- error from previous GL command](https://avatars.githubusercontent.com/u/51099935?v=4)












 Fig.1
Fig.1
 Fig.2
Fig.2



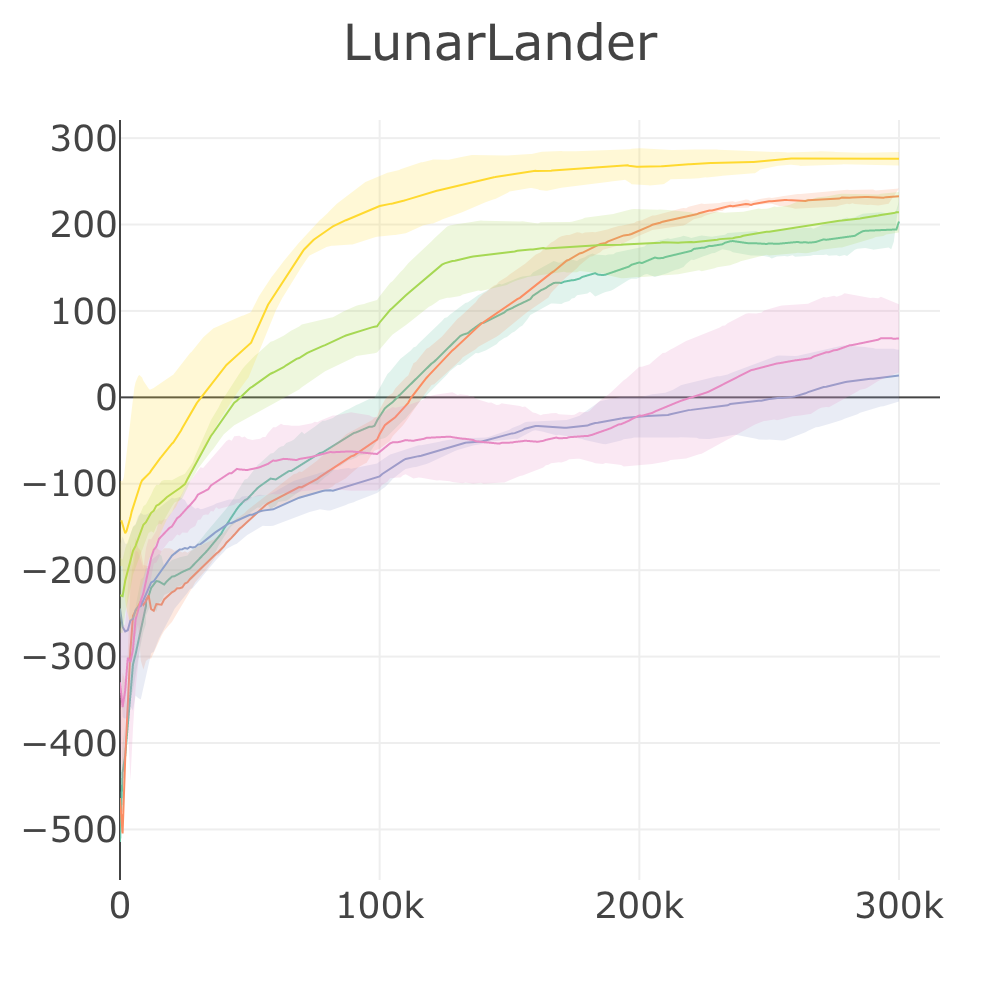


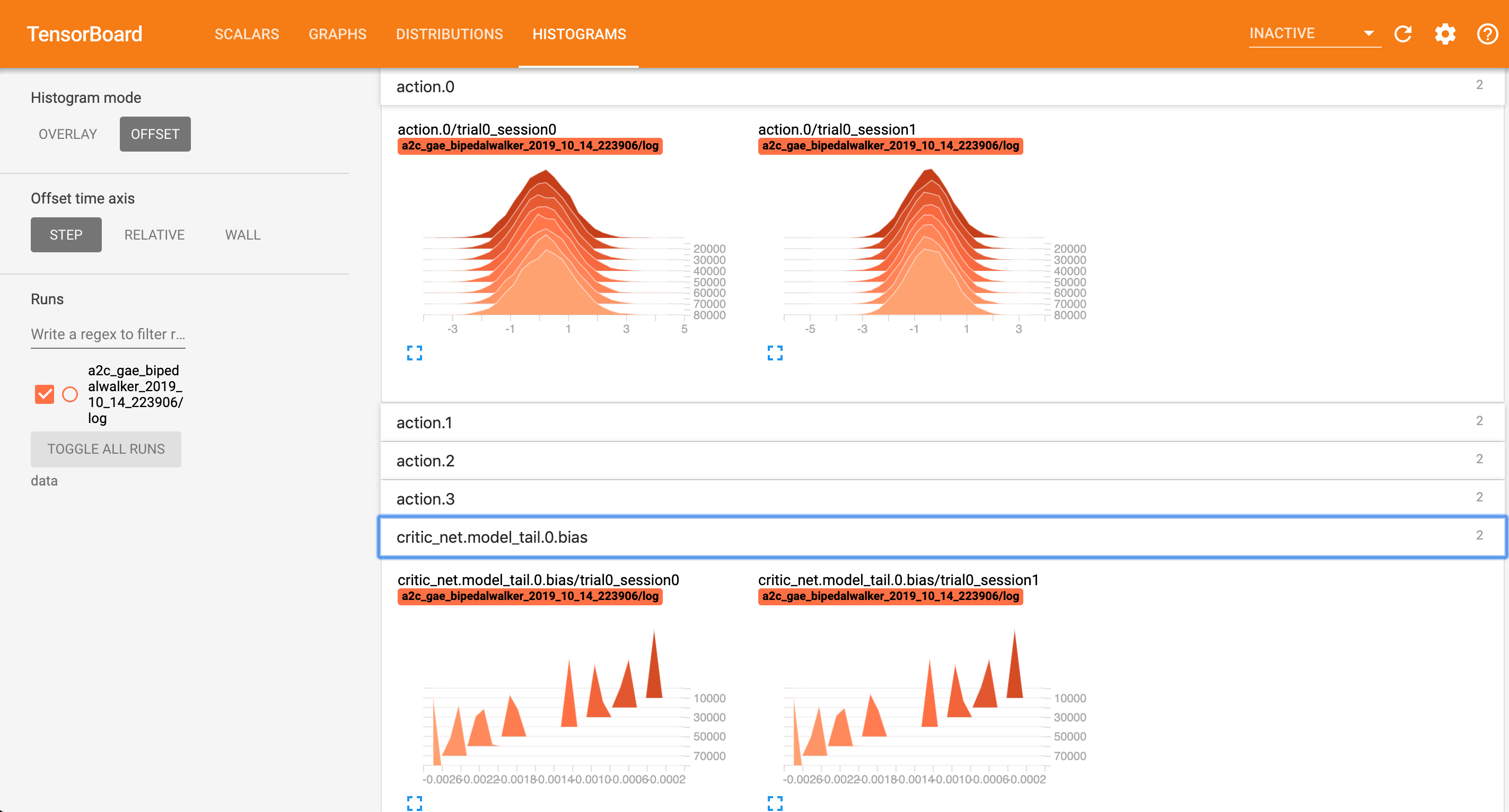













































































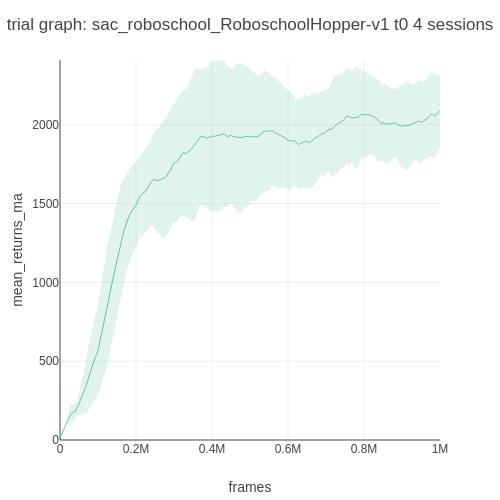
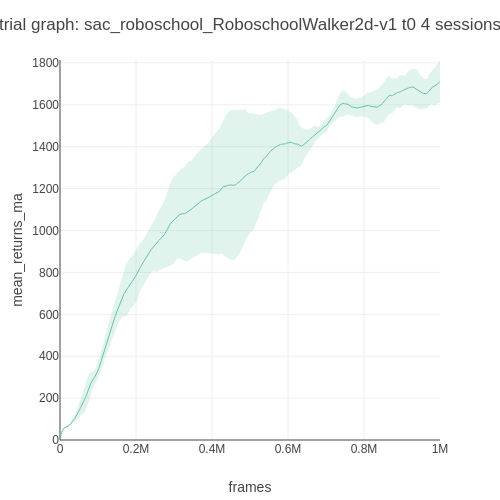
 |
| |
| Trial graph | Moving average |
|
| Trial graph | Moving average |




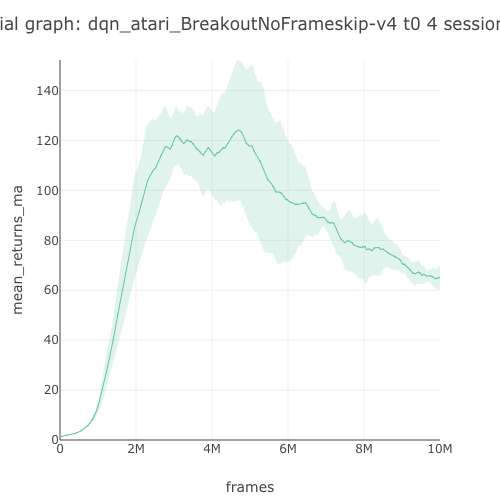
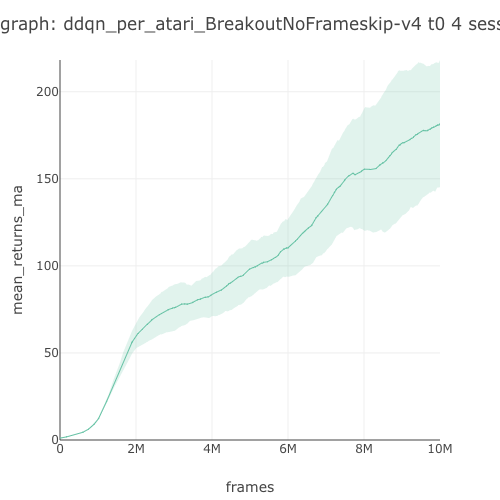






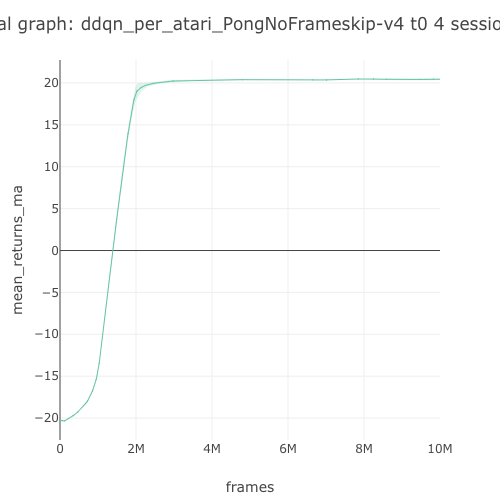

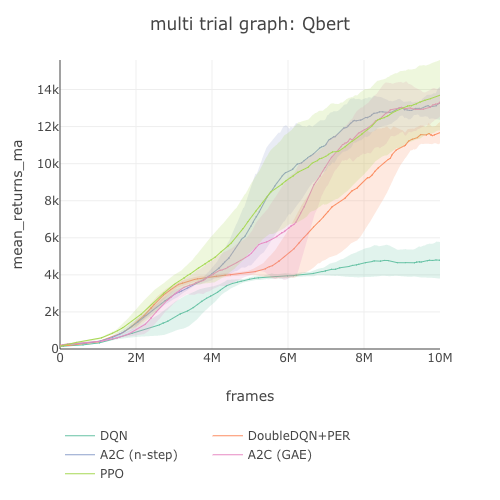


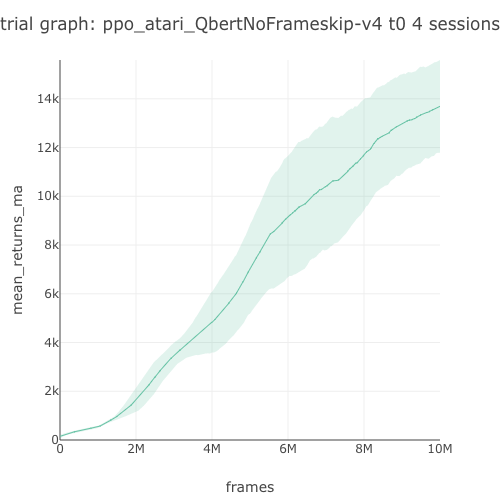

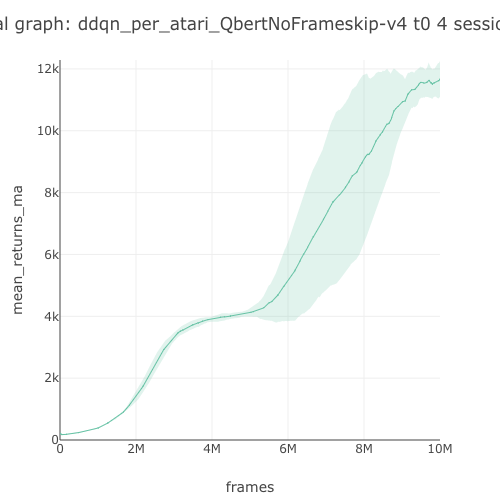


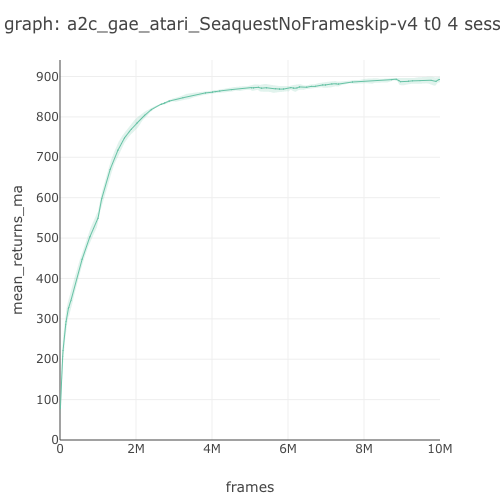
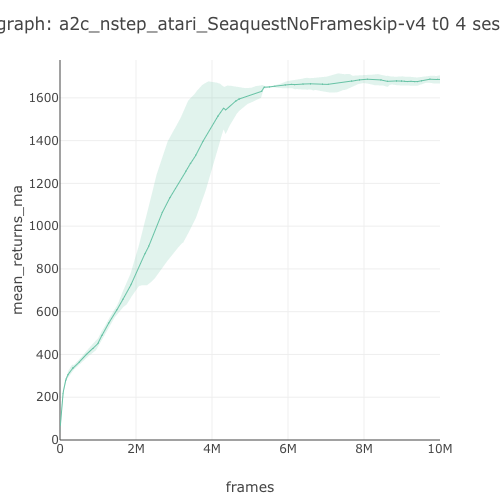






 32 Jul 28, 2022
32 Jul 28, 2022
 2.8k Jan 03, 2023
2.8k Jan 03, 2023
 653 Jan 06, 2023
653 Jan 06, 2023
 6.4k Jan 05, 2023
6.4k Jan 05, 2023
 5.4k Jan 04, 2023
5.4k Jan 04, 2023
 2.2k Jan 05, 2023
2.2k Jan 05, 2023
 117 Dec 12, 2022
117 Dec 12, 2022
 3.3k Jan 05, 2023
3.3k Jan 05, 2023
 213 Jan 05, 2023
213 Jan 05, 2023
 3.1k Dec 29, 2022
3.1k Dec 29, 2022
 404 Dec 25, 2022
404 Dec 25, 2022
 3.7k Jan 01, 2023
3.7k Jan 01, 2023
 10k Jan 07, 2023
10k Jan 07, 2023
 123 Dec 23, 2022
123 Dec 23, 2022
 346 Jan 03, 2023
346 Jan 03, 2023
 1.1k Dec 26, 2022
1.1k Dec 26, 2022
 3.2k Jan 02, 2023
3.2k Jan 02, 2023