当前位置:网站首页>34、树莓派进行人体姿态检测并进行语音播报
34、树莓派进行人体姿态检测并进行语音播报
2022-08-01 12:46:00 【sxj731533730】
基本思想:需要水一篇博客,套用了qiuqiu大佬的simplepose代码,使用ncnn框架,做了个动作检测,然后套用了树莓派4b和使用了语音模块播报
一、自己购买树莓派和喇叭,链接参考这篇博客26、友善NanoPi NEO进行目标检测和串口调试语音播报_sxj731533730的博客-CSDN博客_nanopi neo python
然后接线图上一下,串口工具和杜邦线是必不可少的,串口调试工具也是必不可少。
,
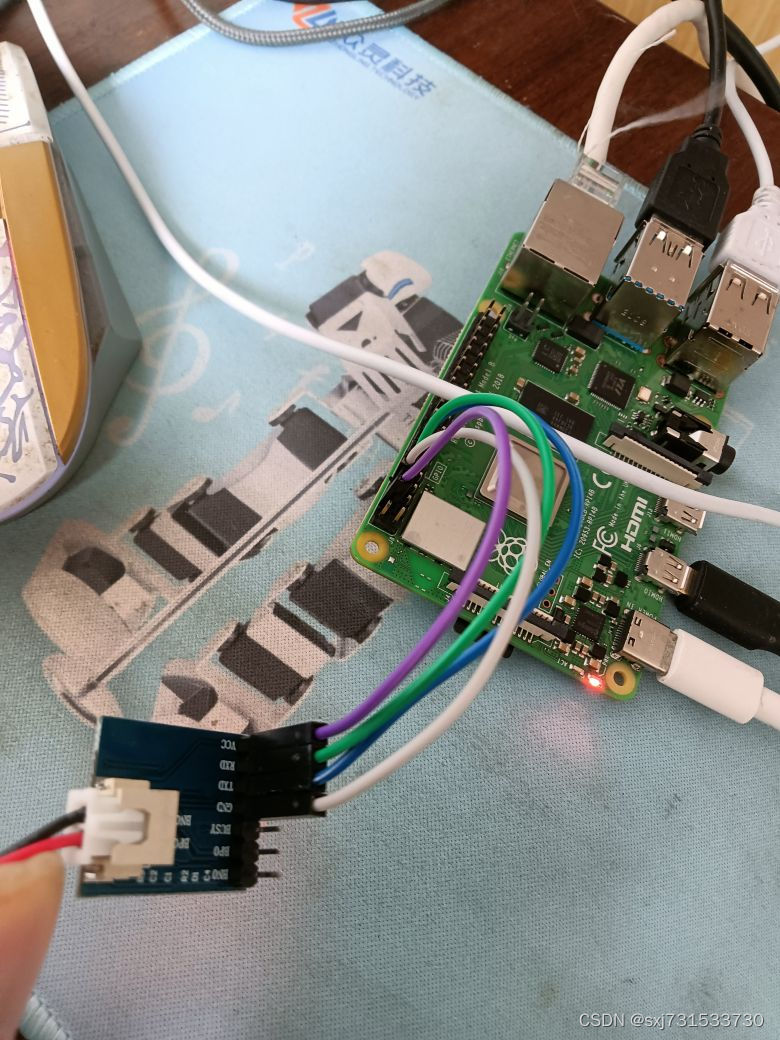

第二步:写代码在树莓中,调用串口和摄像头(摄像头可以使用手机的摄像头或者笔记本的摄像头 直接用ffmpeg拉流推流给树莓派代码),我用的usb摄像头,推拉流摄像头使用手机摄像头当做实际树莓派的输入视频流 参考这篇38、静默活体检测测试及ncnn、mnn部署_sxj731533730的博客-CSDN博客_静默活体检测
#include "ncnn/net.h"
#include <algorithm>
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#endif
#include <stdio.h>
#include <vector>
#include <iostream>
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
#include<unistd.h>
#include<stdio.h>
#include<sys/types.h>
#include<sys/stat.h>
struct KeyPoint
{
cv::Point2f p;
float prob;
};
ncnn::Net posenet;
int initial(){
posenet.opt.use_vulkan_compute = true;
// the simple baseline human pose estimation from gluon-cv
// https://gluon-cv.mxnet.io/build/examples_pose/demo_simple_pose.html
// mxnet model exported via
// pose_net.hybridize()
// pose_net.export('pose')
// then mxnet2ncnn
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
if (posenet.load_param("../model/pose.param"))
exit(-1);
if (posenet.load_model("../model/pose.bin"))
exit(-1);
}
static int detect_posenet(const cv::Mat& bgr, std::vector<KeyPoint>& keypoints)
{
int w = bgr.cols;
int h = bgr.rows;
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, w, h, 192, 256);
// transforms.ToTensor(),
// transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225)),
// R' = (R / 255 - 0.485) / 0.229 = (R - 0.485 * 255) / 0.229 / 255
// G' = (G / 255 - 0.456) / 0.224 = (G - 0.456 * 255) / 0.224 / 255
// B' = (B / 255 - 0.406) / 0.225 = (B - 0.406 * 255) / 0.225 / 255
const float mean_vals[3] = {0.485f * 255.f, 0.456f * 255.f, 0.406f * 255.f};
const float norm_vals[3] = {1 / 0.229f / 255.f, 1 / 0.224f / 255.f, 1 / 0.225f / 255.f};
in.substract_mean_normalize(mean_vals, norm_vals);
ncnn::Extractor ex = posenet.create_extractor();
ex.input("data", in);
ncnn::Mat out;
ex.extract("conv3_fwd", out);
// resolve point from heatmap
keypoints.clear();
for (int p = 0; p < out.c; p++)
{
const ncnn::Mat m = out.channel(p);
float max_prob = 0.f;
int max_x = 0;
int max_y = 0;
for (int y = 0; y < out.h; y++)
{
const float* ptr = m.row(y);
for (int x = 0; x < out.w; x++)
{
float prob = ptr[x];
if (prob > max_prob)
{
max_prob = prob;
max_x = x;
max_y = y;
}
}
}
KeyPoint keypoint;
keypoint.p = cv::Point2f(max_x * w / (float)out.w, max_y * h / (float)out.h);
keypoint.prob = max_prob;
keypoints.push_back(keypoint);
}
return 0;
}
int sendSerialPort(const char W_BUF[], int length) {
int tty_fd = -1;
int rv = -1;
struct termios options;
system("sudo chmod 777 /dev/ttyS0");
tty_fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY | O_NDELAY); //打开串口设备
fcntl(tty_fd, F_SETFL, 0);
if (tty_fd < 0) {
printf("open tty failed:%s\n", strerror(errno));
close(tty_fd);
return -1;
}
printf("open devices sucessful!\n");
memset(&options, 0, sizeof(options));
rv = tcgetattr(tty_fd, &options); //获取原有的串口属性的配置
if (rv != 0) {
printf("tcgetattr() failed:%s\n", strerror(errno));
close(tty_fd);
return -1;
}
options.c_cflag |= (CLOCAL | CREAD); // CREAD 开启串行数据接收,CLOCAL并打开本地连接模式
options.c_cflag &= ~CSIZE;// 先使用CSIZE做位屏蔽
options.c_cflag |= CS8; //设置8位数据位
options.c_cflag &= ~PARENB; //无校验位
cfsetispeed(&options, B9600);
cfsetospeed(&options, B9600);
options.c_cflag &= ~CSTOPB;
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
tcflush(tty_fd, TCIFLUSH);
if ((tcsetattr(tty_fd, TCSANOW, &options)) != 0) {
printf("tcsetattr failed:%s\n", strerror(errno));
close(tty_fd);
return -1;
}
std::cout << std::endl << "length= " << length << std::endl;
rv = write(tty_fd, W_BUF, length);
if(rv<=0) /* 出错了*/
{
if (errno == EINTR) /* 中断错误 我们继续写*/
{
close(tty_fd);
printf("[SeanSend]error errno==EINTR continue\n");
} else if (errno == EAGAIN) /* EAGAIN : Resource temporarily unavailable*/
{
sleep(1);//等待一秒,希望发送缓冲区能得到释放
close(tty_fd);
printf("[SeanSend]error errno==EAGAIN continue\n");
} else /* 其他错误 没有办法,只好退了*/
{
printf("[SeanSend]ERROR: errno = %d, strerror = %s \n", errno, strerror(errno));
return (-1);
}
}
if (rv < 0) {
printf("Write() error:%s\n", strerror(errno));
close(tty_fd);
return -1;
}
for (int i = 0; i < length; i++) {
std::cout << std::hex << (int) W_BUF[i] << " ";
}
close(tty_fd);
printf("\nWrite() successfully\n");
return 0;
}
static void draw_pose(const cv::Mat& bgr, const std::vector<KeyPoint>& keypoints)
{
cv::Mat image = bgr.clone();
// draw bone
static const int joint_pairs[16][2] = {
{0, 1}, {1, 3}, {0, 2}, {2, 4}, {5, 6}, {5, 7}, {7, 9}, {6, 8}, {8, 10}, {5, 11}, {6, 12}, {11, 12}, {11, 13}, {12, 14}, {13, 15}, {14, 16}
};
// for (int i = 0; i < 16; i++)
// {
// const KeyPoint& p1 = keypoints[joint_pairs[i][0]];
// const KeyPoint& p2 = keypoints[joint_pairs[i][1]];
//
// if (p1.prob < 0.2f || p2.prob < 0.2f)
// continue;
//
// cv::line(image, p1.p, p2.p, cv::Scalar(255, 0, 0), 2);
//
//
// }
// cv::line(image, keypoints[joint_pairs[4][0]].p, keypoints[joint_pairs[4][1]].p, cv::Scalar(255, 0, 255), 8);
// cv::line(image, keypoints[joint_pairs[5][0]].p, keypoints[joint_pairs[5][1]].p, cv::Scalar(0, 0, 255), 8);
//cv::line(image, keypoints[joint_pairs[6][0]].p, keypoints[joint_pairs[6][1]].p, cv::Scalar(255, 255, 120), 8);
//cv::line(image, keypoints[joint_pairs[7][0]].p, keypoints[joint_pairs[7][1]].p, cv::Scalar(0, 255, 255), 8);
//cv::line(image, keypoints[joint_pairs[8][0]].p, keypoints[joint_pairs[8][1]].p, cv::Scalar(255, 255, 0), 8);
// draw joint
// for (size_t i = 0; i < keypoints.size(); i++)
// {
// const KeyPoint& keypoint = keypoints[i];
//
// fprintf(stderr, "%.2f %.2f = %.5f\n", keypoint.p.x, keypoint.p.y, keypoint.prob);
//
// if (keypoint.prob < 0.2f)
// continue;
//
// cv::circle(image, keypoint.p, 3, cv::Scalar(0, 255, 0), -1);
// }
const char data[] = {0xFD,0x00 ,0x07 ,0x01 ,0x01 ,0xB4, 0xF2 ,0xC8, 0xAD ,0xD9 };
cv::circle(image, keypoints[5].p, 3, cv::Scalar(255, 255, 255), -1);
cv::putText(image, "5", keypoints[5].p, cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(255, 255, 255), 1, 8, 0);
cv::circle(image, keypoints[6].p, 3, cv::Scalar(0, 255, 0), -1);
cv::putText(image, "6", keypoints[6].p, cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(0, 255, 255), 1, 8, 0);
cv::circle(image, keypoints[8].p, 3, cv::Scalar(0, 255, 0), -1);
cv::putText(image, "8", keypoints[8].p, cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(0, 255, 255), 1, 8, 0);
cv::circle(image, keypoints[7].p, 3, cv::Scalar(0, 255, 0), -1);
cv::putText(image, "7", keypoints[7].p, cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(0, 255, 255), 1, 8, 0);
cv::circle(image, keypoints[9].p, 3, cv::Scalar(0, 255, 0), -1);
cv::putText(image, "9", keypoints[9].p, cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(0, 255, 255), 1, 8, 0);
cv::circle(image, keypoints[10].p, 3, cv::Scalar(0, 255, 0), -1);
cv::putText(image, "10", keypoints[10].p, cv::FONT_HERSHEY_COMPLEX, 1, cv::Scalar(0, 255, 255), 1, 8, 0);
if(keypoints[9].p.y<keypoints[7].p.y&&keypoints[10].p.y<keypoints[8].p.y){
//printf("rise hand \n");
int distance0=sqrt( pow(keypoints[9].p.y-keypoints[5].p.y,2)+pow(keypoints[9].p.x-keypoints[5].p.x,2));
int distance1=sqrt( pow(keypoints[6].p.y-keypoints[10].p.y,2)+pow(keypoints[6].p.x-keypoints[10].p.x,2));
//printf("disntance %d\n",distance);
if(distance0>60&&distance1>60){
printf("make pose\n");
sendSerialPort(data, sizeof(data));//测试
}
}
cv::imshow("image", image);
cv::waitKey(1);
}
int main(int argc, char** argv)
{
cv::VideoCapture capture(0);
if (!capture.isOpened()) {
std::cout << "open camera error!" << std::endl;
return -1;
}
initial();
cv::Mat frame;
while (1) {
capture >> frame;
cv::resize(frame,frame,cv::Size(640,640));
std::vector<KeyPoint> keypoints;
detect_posenet(frame, keypoints);
draw_pose(frame, keypoints);
if (frame.empty()) {
std::cout << "capture empty frame" << std::endl;
continue;
}
}
return 0;
}
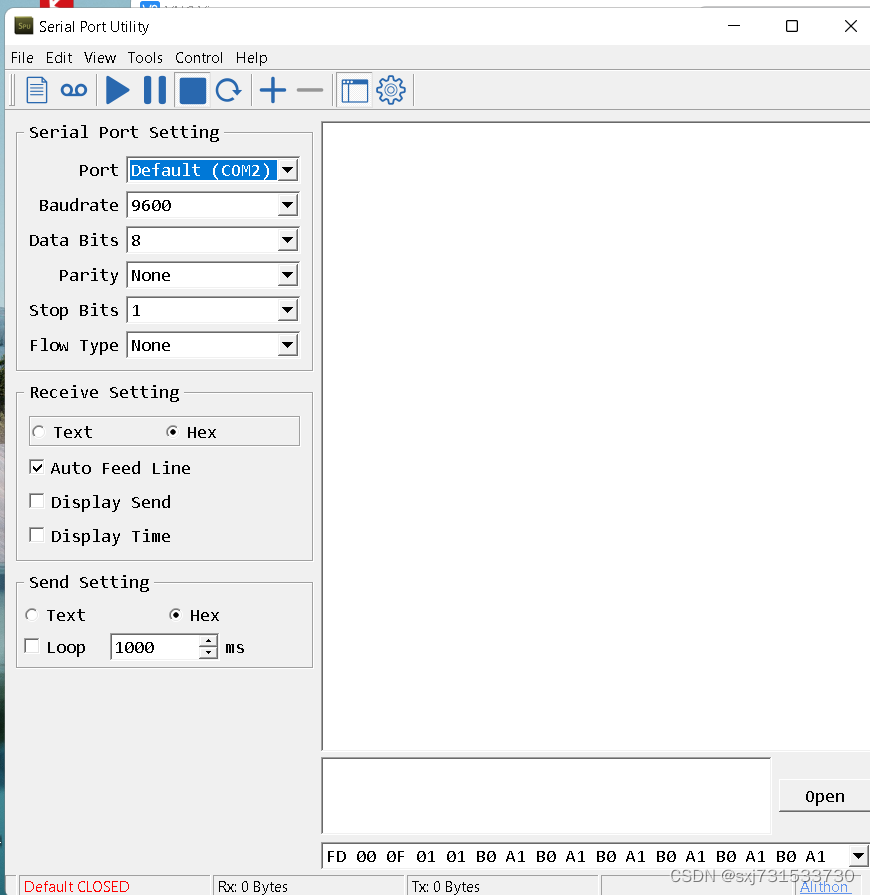
其中中文生成语音十六进制使用喇叭官方软件拷贝就行,只上个简单图

测试结果
[email protected]:~/Orienmask_project/build $ ./Orienmask_project
hit box
open devices sucessful!
length= 10
fd 0 7 1 1 b4 f2 c8 ad d9
Write() successfully
make pose
open devices sucessful!
length= a
fd 0 7 1 1 b4 f2 c8 ad d9
Write() successfully
make pose
open devices sucessful!
length= a
fd 0 7 1 1 b4 f2 c8 ad d9
Write() successfully
make pose
open devices sucessful!
length= a
fd 0 7 1 1 b4 f2 c8 ad d9
Write() successfully
make pose
open devices sucessful!
length= a
fd 0 7 1 1 b4 f2 c8 ad d9
Write() successfully
make pose
open devices sucessful!
边栏推荐
- 数据湖 delta lake和spark版本对应关系
- Programmer's self-cultivation
- Audio and Video Technology Development Weekly | 256
- PanGu-Coder:函数级的代码生成模型
- 人像分割技术解析与应用
- SQL函数 STR
- 字体反爬之好租
- [Cloud Enjoying Freshness] Community Weekly Vol.73- DTSE Tech Talk: 1 hour in-depth interpretation of SaaS application system design
- tensorflow2.0 handwritten digit recognition (tensorflow handwriting recognition)
- 六石编程学:问题要面对,办法要技巧,做不好的功能要想办法
猜你喜欢



随机推荐
SQL functions STR
.NET性能优化-使用SourceGenerator-Logger记录日志
人像分割技术解析与应用
NebulaGraph v3.2.0 性能报告
Dameng replaces the officially authorized dm.key
Aeraki Mesh became CNCF sandbox project
CloudCompare&PCL ICP配准(点到面)
[Community Star Selection] Issue 24 August Update Plan | Keep writing, refuse to lie down!More original incentive packages, as well as Huawei WATCH FIT watches!
Visualization of lag correlation of two time series data in R language: use the ccf function of the forecast package to draw the cross-correlation function, and analyze the lag correlation according t
四足机器人软件架构现状分析
批量任务导入到数据库中
蔚来又一新品牌披露:产品价格低于20万
实现集中式身份认证管理的案例
Based on 10 years of experience in stability assurance, what are the three key questions to be answered in failure recovery?|TakinTalks big coffee sharing
Data frame and remote frame of CAN communication
What is MNIST (what does plist mean)
大中型网站列表页翻页过多怎么优化?
Why does the maximum plus one equal the minimum
线上问题排查常用命令,总结太全了,建议收藏!!
Tencent Cloud Native: Service Mesh Practice of Areaki Mesh in the 2022 Winter Olympics Video Live Application