当前位置:网站首页>3D point cloud course (VIII) -- feature point matching
3D point cloud course (VIII) -- feature point matching
2022-07-26 12:02:00 【The birch tree has no tears】
Catalog
2、Normal Distribution Transform(NDT)
2.2 MLE(Maximum Likehood Estimation)
1、ICP


First, find the corresponding problem between the two groups of point clouds , stay ICP Find the nearest point inside , Forcibly obtain R,t, It was obviously wrong at first , But this is an iterative process , until R,t The change is very small. . It can be used IMU Get initialized R,t.

Find out R,t Get the minimum value


2、ICP improvement
2.1 Reduction point
- Don't do all the points ICP
- Sampling under the point cloud
- Normal Space Sampling(NSS)

- Take characteristic points
2.2 Data Association
- Nearest neighbor search
- Normal shooting: Suitable for smooth point clouds

- Projection
- Feature descriptor matching
2.3 Outlier Rejection
Remove long distance
Remove mismatched points
2.4 Loss function
- Point-to-point
- point-to-plane
The distance from the point to the nearest point plane ,point-to-point May force the corresponding point ,point-to-plane Convergence is faster .LOAM





2、Normal Distribution Transform(NDT)
2.1 NDT Dividing grid
You can use the information around each point , No need to do nearest neighbor search
Take one grid as a unit , Find the grid where the point falls , The information in the lattice is a Gaussian model to describe the distribution of point clouds .

Larger than 5 Only a point can Gaussian modeling

Gaussian distribution of three dimensions

2.2 MLE(Maximum Likehood Estimation)
Given the initial R,t, Determine which square the point falls into , Determine the Gaussian model .
The registration problem of point cloud becomes maximum likelihood estimation


outlier Points will cause the solution to collapse , Let the point probability be at least equal to a certain number



3、 RANSAC
In many cases, there is no initial solution , It's time to Feature detection + description + RANSAC
Feature point extraction 、 Description matches 、 iteration


General rigid point cloud registration

边栏推荐
- 3.2 create menu and game pages (Part 2)
- 一些实用、常用、效率越来越高的 Kubernetes 别名
- How did the $50000 annual salary run out
- 音视频+
- 11 "pocket" universities in China! Running on campus and leaving the school before accelerating
- [download attached] a powerful web automated vulnerability scanning tool - Xray
- Audio and video technology development weekly | 255
- Pytest interface automated testing framework | introduction to fixture of pytest
- Subject 3 turns and turns
- Why BGP server is used in sunflower remote control? Automatic optimal route and high-speed transmission across operators
猜你喜欢
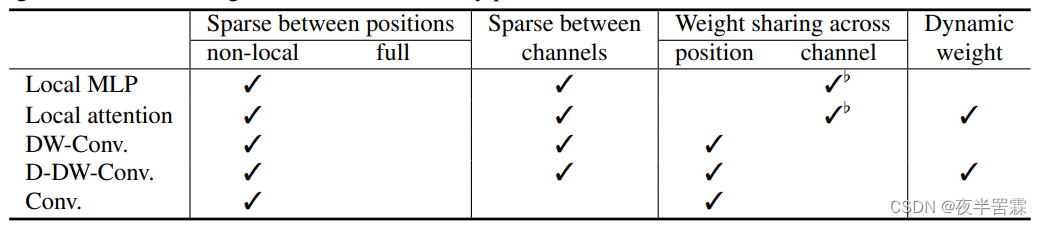
transformer一统天下?depth-wise conv有话要说

国内11所“袖珍”大学!在校园跑步,还没加速就出校门了...

了解string类

CVPR 2022 单目深度估计新SOTA—NeW CRFs:Neural Window Fullyconnected CRFs
11 "pocket" universities in China! Running on campus and leaving the school before accelerating
![[countdown 10 days] Tencent cloud audio and video special is about to meet, and the thousand yuan prize is waiting for you!](/img/a0/4910970a089cab198875944c7ae88c.png)
[countdown 10 days] Tencent cloud audio and video special is about to meet, and the thousand yuan prize is waiting for you!

DS-112时间继电器
浅谈低代码技术在物流运输平台中的搭建与管理

数智转型,管理先行|JNPF全力打造“全生命周期管理”平台
Is it easy to find a job after programmer training?
随机推荐
System call capture and segmentation - RING3 layer LD_ Preload mechanism for library function hijacking
System call capture and analysis - ring layer kprobe hijacks system calls
大佬们,请教一下,我按照文档配了cdc连接oracle,总是运行报错找不到类 ValidstionE
Why BGP server is used in sunflower remote control? Automatic optimal route and high-speed transmission across operators
Pytest interface automation test framework | execute use cases through markup expressions
Is it easy to find a job after programmer training?
Server memory failure prediction can actually do this!
Redisson分布式锁流程详解(二)
Pytest interface automation test framework | rerun failed cases
Pytest interface automation test framework | pytest configuration file
面试官:如何处理高并发?
Hou Peixin, chairman of the openharmony Working Committee of the open atom open source foundation, sent a message to the openatom openharmony sub forum
Flink cdc 是不是只支持 sql-client的方式提交SQL脚本啊
Fineos announced the open registration of grouptech connect activities in 2022
Pytest interface automated test framework | fixture call fixture
需不需要上线MES系统,你在纠结什么?
以太网驱动详解之RMII、SMII、GMII、RGMII接口
Win10 uses NVM to install node, NPM, and cnpm
Pytorch深度学习快速入门教程 -- 土堆教程笔记(一)
沟通中经常用到的几个库存术语