当前位置:网站首页>自监督论文阅读笔记 Self-Supervised Deep Learning for Vehicle Detection in High-Resolution Satellite Imagery
自监督论文阅读笔记 Self-Supervised Deep Learning for Vehicle Detection in High-Resolution Satellite Imagery
2022-08-03 05:23:00 【YoooooL_】
本文中,展示了一个自监督的深度学习流程,它可以有效地学习 检测车辆,而无需使用任何预先标记的训练数据。该流程使用 形态学车辆检测算法 自动生成卷积神经网络 (CNN) 的训练集。本文使用 0.31 米的多光谱 Worldview-3 卫星图像 在沙特阿拉伯利雅得的一个 混合用途城市社区 测试了这种方法,该图像具有 八个可见光 和 近红外波长波段。该方法通过从 高精度、低召回率的形态模型生成平衡的训练样本 来训练神经网络 来识别一般的车辆特征,从而 利用 许多车辆检测问题固有的类别不平衡。这种方法建立在广泛适用的图像处理方法之上,经过适当调整,可能会适应各种卫星或航空来源的高分辨率。
计算机视觉的最新进展推动了城市应用遥感的快速增长。随着 高分辨率卫星和航空图像 的日益普及,车辆检测 在城市规划、资源管理、自然灾害监测和移动建模中变得越来越普遍。目前可用的最准确的目标提取方法 通常依赖于手动标记的数据 来训练完全监督的深度学习模型 [1]。生成合适的数据集 可能既耗时又昂贵,尤其是因为生成高质量的标签可能需要领域专业知识。
随着 可用图像的数量 和 多样性的 不断增长,为不同的感兴趣对象 创建大型手动注释数据集可能会给该领域的 研究人员 和 从业者 带来重大瓶颈。一些研究试图 限制注释数据的使用 [1] 来克服这些挑战。本文提出了一种 完全自监督的方法,该方法 利用 形态算法 和 深度学习 的组合 来 检测未标记卫星图像中的车辆。
形态学方法 和 图像处理算法 已显示出用于 自动目标检测 的有希望的能力。一些研究人员已经 使用形态学过程 [2] 在高分辨率卫星图像中检测车辆。最近,深度学习方法在车辆检测任务中表现出很高的准确性,最成功的深度学习方法 通常利用大规模的手动标记的数据集,例如Cars Overhead with Con-text(COWC) [3]。然而,这些数据集是 针对特定的图像规范 量身定制的,并且可能需要付出巨大的努力 才能 为替代来源 创建类似的训练数据集。
许多研究提出了多种方法来减少对注释的需求。一些方法使用半监督方法[4],可以用少量注释数据进行训练。一些研究采用了 弱监督方法 来限制人为干预,例如使用 主动学习 来生成真值映射 [5]。然而,在没有人工干预的情况下 从单个数据源 进行完全自监督的检测仍然有限。
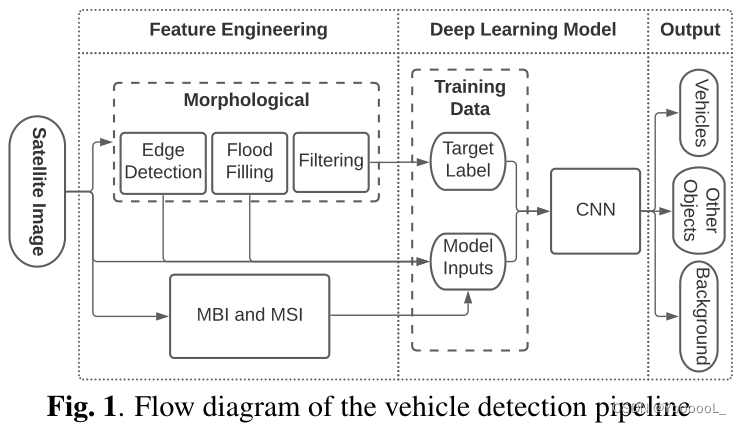
在高分辨率卫星图像中检测车辆的自监督机器学习,该方法 使用基于形态学的车辆检测模型训练 CNN 以生成训练数据。由于在我们的数据集中观察到的类别不平衡(车辆通常占图像的 3% 以下),即使在召回率较低的情况下,深度学习方法也能够在提供高精度结果时,有效地学习检测车辆。当这些结果 用于生成平衡的训练样本时,精度很高时,假负样本 仅代表 非车辆类训练样本的一小部分。高精度 还确保 车辆类的训练样本中 包含很少的假正样本。在整个研究过程中,我们使用 0.31 米 Worldview 3 图像进行所有训练、测试和评估。
形态学车辆检测算法 使用 形态学梯度 来定义边缘 和flood filling洪水填充 以检测 多光谱图像中的 闭合形状。该方法 隔离了 类似于标准车辆尺寸 并且 与背景和较大对象不同的 小型连接组件。
本文通过 计算形态梯度 G 来检测边缘,由等式 (1) 定义,为图像 I 和内核 S 的膨胀和腐蚀之间的差异。该值表示内核内最大和最小像素强度之间的差异。
![]()
该方法首先使用 半径为 3 个像素的 圆形kernel 计算形态梯度。一旦检测到边缘,我们使用flood filling 洪水填充 [6] 来填充边缘内的所有孔。然后我们按区域(50 - 250 像素)过滤所有连接的组件,并再次采用形态梯度。在过滤低于亮度阈值的像素后,我们应用一系列形态关闭操作(使用 3、5 和 5 像素的圆盘)。为了获得最终结果,我们 对闭合图像进行 flood filling 泛洪填充操作,并对低于亮度阈值的像素进行掩码。
本文使用的 CNN 由一个相对较小的浅层网络架构组成。由于形态学方法只能达到中等精度,因此浅层网络结构更适合学习一般模式,而不会过度拟合固有的噪声训练数据。各层规格见表1。最终输出将每个图像分为三个可能的类别,分别代表预测的车辆、背景和其他对象。
模型的 输入是一个 16 × 16 像素的图像,具有八个光谱波段和四个处理波段。该模型使用这些特征将三个类别之一分配给中心像素。我们可以使用这种方法 通过扫描图像 并为感兴趣区域中的每个像素生成 16 × 16 的输入 来对更大的图像进行分类。虽然我们只关心车辆类的输出,但我们使用第三类(“其他对象”)来表示 可能的假正样本 并改善车辆和非车辆之间的决策边界。其他对象这一类 由形态检测算法的初始步骤检测到 但由于其几何特性而被过滤掉的对象组成。
为了生成训练数据,我们从图像中随机抽取像素而不进行替换。本文根据图像中心的像素子集为每个输入图像分配一个类。我们在包含三个类别(车辆、背景和其他对象)中每个类别的 10,000 个样本的平衡训练集上训练网络。我们通过 在下阈值和上阈值之间 标准化像素强度 来生成软类标签。下阈值 用于减少噪声 并 过滤掉大部分假正样本。我们分配上阈值主要是为了裁剪镜面反射的大梯度。
我们还包括从原始图像生成的四个处理波段。两个是形态算法的中间步骤 - 由 (1) 给出的平均形态梯度,以及由区域过滤器移除的 flood-filling 算法的结果(主要是大型物体,如建筑物)。此外,本文还包括 Huang 等人详述的形态建筑指数 (MBI) 和形态阴影指数 (MSI)。
本文将 车辆检测方法 应用于Saudi Arabia的 典型混合用途社区 同一位置的四张图像。本文从每张图像中随机选择了 200 辆汽车的样本,并用清晰度等级对它们进行了标记,以指示清晰、黑暗和低对比度的车辆。
通过测量 与 真的正样本 相对应的检测到的像素的百分比来计算精度。为了降低 对边界不匹配的 高度敏感性,本文从精确计算中排除了每辆车周围的一个小缓冲区。图 3 显示大部分 假正样本 位于车辆的 3 个像素(约 0.93 m)内。
本文使用 像素 和 目标召回 来评估模型检测车辆存在的能力。仅当 检测到的像素分数 (Af) 超过最小阈值 时,目标召回才会将每个手动标记的多边形指定为 真的正样本。除非另有说明,否则本文使用 Af > 0.5(至少 50% 像素检测)的最小阈值作为目标召回中的真的正样本。
当置信度超过 0.8 的阈值时,像素被归类为 车辆 的一部分。本文还在表 2 中计算了精度-召回 曲线下的面积 (AUC-PR) 和接收者操作特征 (AUC-ROC)。
当使用 0.5 的面积分数阈值 应用于测试图像时,该方法实现了 0.877 ± 0.028 的平均精度和 0.711 ± 0.071 的平均召回率。该模型目前通过 对形态车辆检测算法 使用相对较高的 θ = 30 阈值,来优先考虑精度而不是召回。较低的阈值可以 以牺牲精度为代价 提高召回率,这可能更适合特定应用,但通常会降低 F1 分数。
三个清晰度等级(清晰、低对比度和暗)显示每个物体检测到的面积分数存在显着差异。低对比度车辆的性能参差不齐,通常无法检测到深色车辆,这凸显了该方法的重大局限性。
图 5 显示了 每个车辆类别的相对频率 以及 检测到 Af > 0.5 的车辆的百分比。指定为清晰的车辆在所有图像中的表示有很多个,并且几乎总是在阈值之上检测到。假负样本 主要由深色和低对比度车辆造成,表明 对特定车辆颜色的方法存在重大限制。该方法只能检测到少量低对比度车辆,并在所有图像中漏掉了大部分深色车辆。

与 Zheng 等人 [2] 的基准方法相比,本文的方法可以在两张高速公路图像中 提供相当的精度和 显著提高的召回率。在本文的方法中,街区图像的 精度明显更高,这表明它对复杂场景中的噪声更加鲁棒。在这两种情况下,Af > 0(每辆车只需要一个像素)的目标召回率相当,但当需要更高的 Af 阈值时,本文的方法显着更高。
该方法可以对 与 周围环境 清晰区分的车辆实现高目标召回率。深色和低对比度车辆通常以低 Af 检测到,尽管它优于基于形态的基准方法。通过用少量手动标签补充训练集,该方法可以扩展到弱监督。
本文提出的方法 最适合 依赖 近似车辆密度 而不是 精确像素掩码的应用。它可以潜在地应用于估计交通拥堵、停车场占用和停车违规。
Conclusion:
随着各种高分辨率航空图像源的快速增长,无需重新训练手动标记的数据 即可轻松泛化的方法变得越来越有用。本文提出的自监督流程依赖于可泛化的形态学方法,这些方法可能通过适当的参数调整适用于其他高分辨率航空图像。需要进一步的研究来确定该方法在替代图像源上的准确性。本文提出的流程等车辆检测方法 可以为城市规划和交通分析提供有价值的信息。
边栏推荐
猜你喜欢




随机推荐
arm64麒麟安装paddlehub(国产化)注意事项
对象の使用
磁盘空间管理
用iPhone前摄3D人像建模,Meta:我看行
动态调整web系统主题? 看这一篇就够了
解决Gradle Download缓慢的百种方法
解析各种文本的年月日
controller层到底能不能用@Transactional注解?
Execute the mysql script file in the docker mysql container and solve the garbled characters
中国认证认可服务行业“十四五”发展规划及经营模式分析报告2022~2028年
3559. 围圈报数
中国食品产业园区行业前景规划建议及投融资模式分析报告2022~2028年
图的最短路径的核心——松弛技术
中国生产力促进中心”十四五”规划与发展规模分析报告2022~2028年
[Rebound shell and privilege escalation]
软件测试 -- 入门 1 软件测试是什么?
中国水煤浆行业“十四五”规划与运营模式分析报告2022~2028年
`monorepo` 中 `hoist` 机制导致加载配置文件路径的变化
Ansible installation and deployment detailed process, basic operation of configuration inventory
自我监督学习和BERT模型