当前位置:网站首页>Cann operator: using iterators to efficiently realize tensor data cutting and blocking processing
Cann operator: using iterators to efficiently realize tensor data cutting and blocking processing
2022-07-04 19:53:00 【InfoQ】
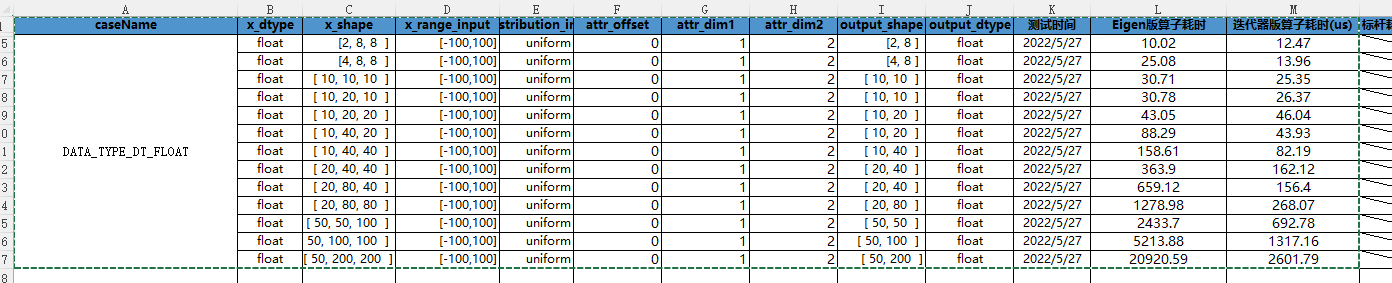
Mission scenarios and objectives
Conventional scheme :
Prepare knowledge and analysis
1. step
2. iterator
template <typename T>
class PositionIterator {
public:
PositionIterator(){};
~PositionIterator(){};
PositionIterator(std::vector<T> stt, std::vector<T> sh) {
if (stt.size() != sh.size()) {
PositionIterator();
} else {
for (unsigned int i = 0; i < sh.size(); i++) {
if (stt[i] >= sh[i]) {
PositionIterator();
}
}
pos_ = stt;
shape_ = sh;
}
}
PositionIterator operator++() {
pos_[shape_.size() - 1] += 1;
for (unsigned int i = shape_.size() - 1; i > 0; i--) {
if (pos_[i] / shape_[i] != 0) {
pos_[i - 1] += pos_[i] / shape_[i];
pos_[i] = pos_[i] % shape_[i];
}
}
return *this;
}
bool End() {
if (pos_[0] != shape_[0]) {
return false;
}
return true;
}
std::vector<T> GetPos() { return pos_; }
std::vector<T> GetShape() { return shape_; }
private:
std::vector<T> pos_;
std::vector<T> shape_;
};Diagonal The realization of operators
template <typename T>
uint32_t DiagonalCpuKernel::DoComputeType(CpuKernelContext &ctx,
const int64_t &offset,
const int64_t &dim1,
const int64_t &dim2) {
// Get the inuput and output
Tensor *input_x = ctx.Input(0);
Tensor *y = ctx.Output(0);
// Get some information of input
auto x_shape = input_x->GetTensorShape();
std::vector<int64_t> x_shape_ = x_shape->GetDimSizes();
const int64_t x_dim = x_shape->GetDims();
auto dataptr = reinterpret_cast<T *>(ctx.Input(0)->GetData());
auto y_dataptr = reinterpret_cast<T *>(y->GetData());
// Compute
// First, calculate the number of diagonal elements
int64_t dsize = OffsetSize(offset, dim1, dim2, x_shape_);
// To generate the input Tensor Step vector of x_stride
std::vector<int64_t> x_stride = ConstructStride<int64_t>(x_shape_);
// Discussion by situation ,2 Peacekeeping greater than 2 The d
if (x_dim != N2) {
//set the vx_shape and vx_stride
// Generate x_shape and x_stride Remove from dim1 and dim2 Corresponding to vx_shape And vx_stride
std::vector<int64_t> vx_shape, vx_stride;
for (unsigned int tmp_dim = 0; tmp_dim < x_shape_.size(); tmp_dim++) {
if (tmp_dim != dim1 && tmp_dim != dim2) {
vx_shape.push_back(x_shape_[tmp_dim]);
vx_stride.push_back(x_stride[tmp_dim]);
}
}
// set the y_shape, y_stride, vy_stride
// Generate output Tensor Shape and step vector of :y_shape and y_stride
std::vector<int64_t> y_shape = vx_shape;
y_shape.push_back(dsize);
std::vector<int64_t> y_stride =
ConstructStride<int64_t>(y_shape);
// Generate output Tensor Out of the last one-dimensional step vector :vy_stride
std::vector<int64_t> vy_stride = y_stride;
vy_stride.pop_back();
// Read diagonal data
std::vector<int64_t> v_start(vx_shape.size(), 0);
for (PositionIterator<int64_t> myiter(v_start, vx_shape); !myiter.End();
++myiter) {
// Use the iterator to determine the division dim1 and dim2 Position coordinates of dimensions
auto p = myiter.GetPos();
// The basic position values of input and output are calculated by step vector and position coordinates base_pos1 and outbase_pos
int64_t base_pos1 = MulSum<int64_t>(p, vx_stride);
int64_t outbase_pos = MulSum<int64_t>(p, vy_stride);
for (int i = 0; i < dsize; i++) {
// Combined with the foundation position value calculated above , Yes dim1 and dim2 The corresponding dimension determines the position of diagonal elements , And assign it to the output data address (get_data It involves taking elements from the upper diagonal or the lower diagonal , It does not affect the understanding of the function of iterators )
int64_t base_pos2 = i * (x_stride[dim1] + x_stride[dim2]);
int64_t arr[N2] = {x_stride[dim1], x_stride[dim2]};
y_dataptr[outbase_pos + i] =
get_data(base_pos1 + base_pos2, offset, arr, dataptr);
}
}
} else {
for (int i = 0; i < dsize; i++) {
int64_t base_pos = i * (x_stride[dim1] + x_stride[dim2]);
int64_t arr[N2] = {x_stride[dim1], x_stride[dim2]};
y_dataptr[i] = get_data(base_pos, offset, arr, dataptr);
}
}
return KERNEL_STATUS_OK;
}Other uses of iterators
for (position_iterator<int64_t> mit(v_start, v_shape); !mit.end(); ++mit) {
auto p = mit.get_pos();
int axis_len = input_shape_[tmp_axis];
std::vector<ValueIndex<T>> data_(axis_len);
int base_pos = mul_sum<int64_t>(p, v_stride);
for (int32_t i = 0; i < axis_len; i++) {
data_[i].value = x_dataptr[base_pos + i * input_stride[tmp_axis]];
data_[i].index = i;
}
std::vector<std::vector<T1>> data_;
for (int64_t i = 0; i < dim0; i++) {
std::vector<T1> tmp_v1;
for (PositionIterator<int64_t> mit(v_start, v_shape); !mit.End(); ++mit) {
auto pos = mit.GetPos();
tmp_v1.push_back(
x_dataptr[MulSum<int64_t>(pos, v_stride) + i * input_stride[axis]]);
}
data_.push_back(tmp_v1);
}边栏推荐
- 1006 sign in and sign out (25 points) (PAT class a)
- 牛客小白月赛7 谁是神箭手
- Educational Codeforces Round 22 E. Army Creation
- Basic use of kotlin
- Utilisation de la barre de progression cbcggprogressdlgctrl utilisée par BCG
- 1003 emergency (25 points) (PAT class a)
- 1002. A+B for Polynomials (25)(PAT甲级)
- 勾股数规律(任意三个数能够满足勾股定理需要满足的条件)
- c# .net mvc 使用百度Ueditor富文本框上传文件(图片,视频等)
- YOLOv5s-ShuffleNetV2
猜你喜欢
![[problem] Druid reports exception SQL injection violation, part always true condition not allow solution](/img/cc/160bc8ccdc378901510c1b61c3f5d3.png)
[problem] Druid reports exception SQL injection violation, part always true condition not allow solution
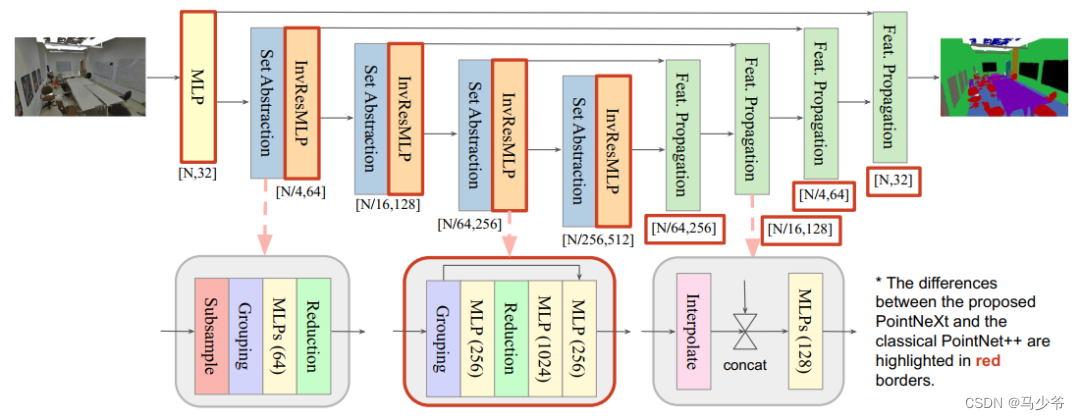
PointNeXt:通过改进的模型训练和缩放策略审视PointNet++

Pythagorean number law (any three numbers can meet the conditions of Pythagorean theorem)

Mysql database basic operation -ddl | dark horse programmer
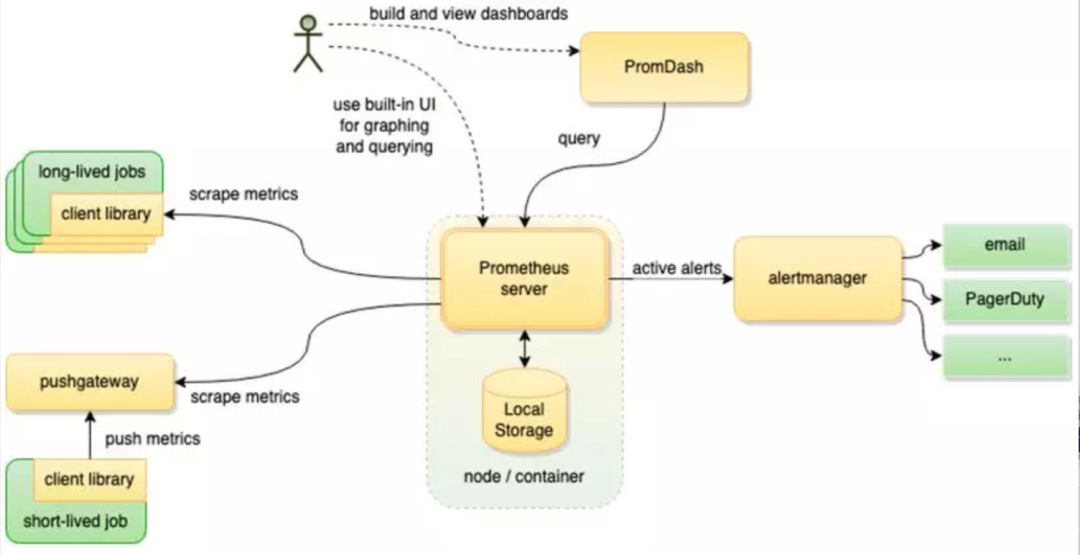
公司要上监控,Zabbix 和 Prometheus 怎么选?这么选准没错!

Online sql to excel (xls/xlsx) tool
应用实践 | 蜀海供应链基于 Apache Doris 的数据中台建设
BCG 使用之CBCGPTabWnd控件(相当于MFC TabControl)

Several methods of online database migration

Lm10 cosine wave homeopathic grid strategy
随机推荐
1002. A+B for Polynomials (25)(PAT甲级)
Write it down once Net analysis of thread burst height of an industrial control data acquisition platform
有关架构设计的个人思考(本文后续不断修改更新)
PolyFit软件介绍
数据集划分
socket编程demo二
Jetpack compose tutorial
[QNX Hypervisor 2.2用户手册]6.3.1 工厂页和控制页
HDU 1097 A hard puzzle
1011 World Cup Betting (20 分)(PAT甲级)
Some thoughts on whether the judgment point is located in the contour
Dark horse programmer - software testing - stage 07 2-linux and database -09-24-linux command learning steps, wildcards, absolute paths, relative paths, common commands for files and directories, file
实战模拟│JWT 登录认证
Explicit random number
BCG 使用之CBCGPProgressDlgCtrl進度條使用
How test engineers "attack the city" (Part 2)
Oracle with as ora-00903: invalid table name multi report error
[QNX hypervisor 2.2 user manual]6.3.1 factory page and control page
CANN算子:利用迭代器高效实现Tensor数据切割分块处理
Is it safe to open an account at Great Wall Securities? How to open an account when buying stocks