当前位置:网站首页>Image recognition from zero to write DNF script key points
Image recognition from zero to write DNF script key points
2022-08-03 01:02:00 【Tomorrow.】
思路:
- Know which coordinates the game role in
- Know which coordinates monsters and the door
- Driver stage keyboard operation let role to monsters attack coordinates and then release skills.
Meet for the first and the second requires that must beReal-time readImage and the ability to识别Iconic images and then given coordinates.
Real-time read in the image
Don't have the energy to playpython了,Good good studyJava吧
废话不多说直接上代码
import cv2
from PIL import ImageGrab
import numpy as np
while True:
im = ImageGrab.grab()
imm = cv2.cvtColor(np.array(im), cv2.COLOR_RGB2BGR)
imm = imm[0:500, 0:500]
imm = cv2.resize(imm, None, fx=0.5, fy=0.5)
cv2.imshow("capture", imm)
if cv2.waitKey(1) & 0xFF == ord('q'): # q键推出
break
cv2.destroyAllWindows()图像识别
我使用的是yolov5.
python版本是:3.10.5
In front of simple say it,Province after I used the forgot again
前置工作
- 用pycharm创建虚拟环境
- 在github把项目克隆下来GitHub - ultralytics/yolov5: YOLOv5 in PyTorch > ONNX > CoreML > TFLite
- 下载依赖(项目里的requirements.txt):pip install -r requirements.txt
- At level clone download directory to create such a directory,It doesn't matter where is actually create,就是方便(Role is to put pictures,放标签,放配置)
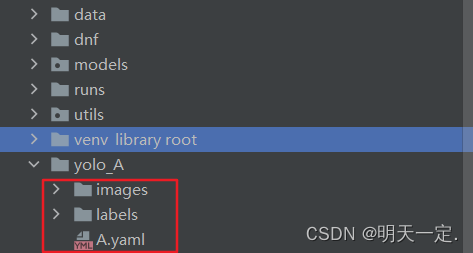
- 开始截图(Put all the cutting down of figureimages里)
- 开始标注(这里我用的是labelImg)
- 训练
- 预测
6.标注
python版本:3.7.8(We may not be compatible with the high version,But I forgot where are not compatible,Lower right)
安装:pip install PyQt5
安装:pip install lxml
Enter the cloned directory to perform:pyrcc5 -o resources.py resources.qrc
把resource.py放入libs目录
执行:python labelImg.py After the launch window
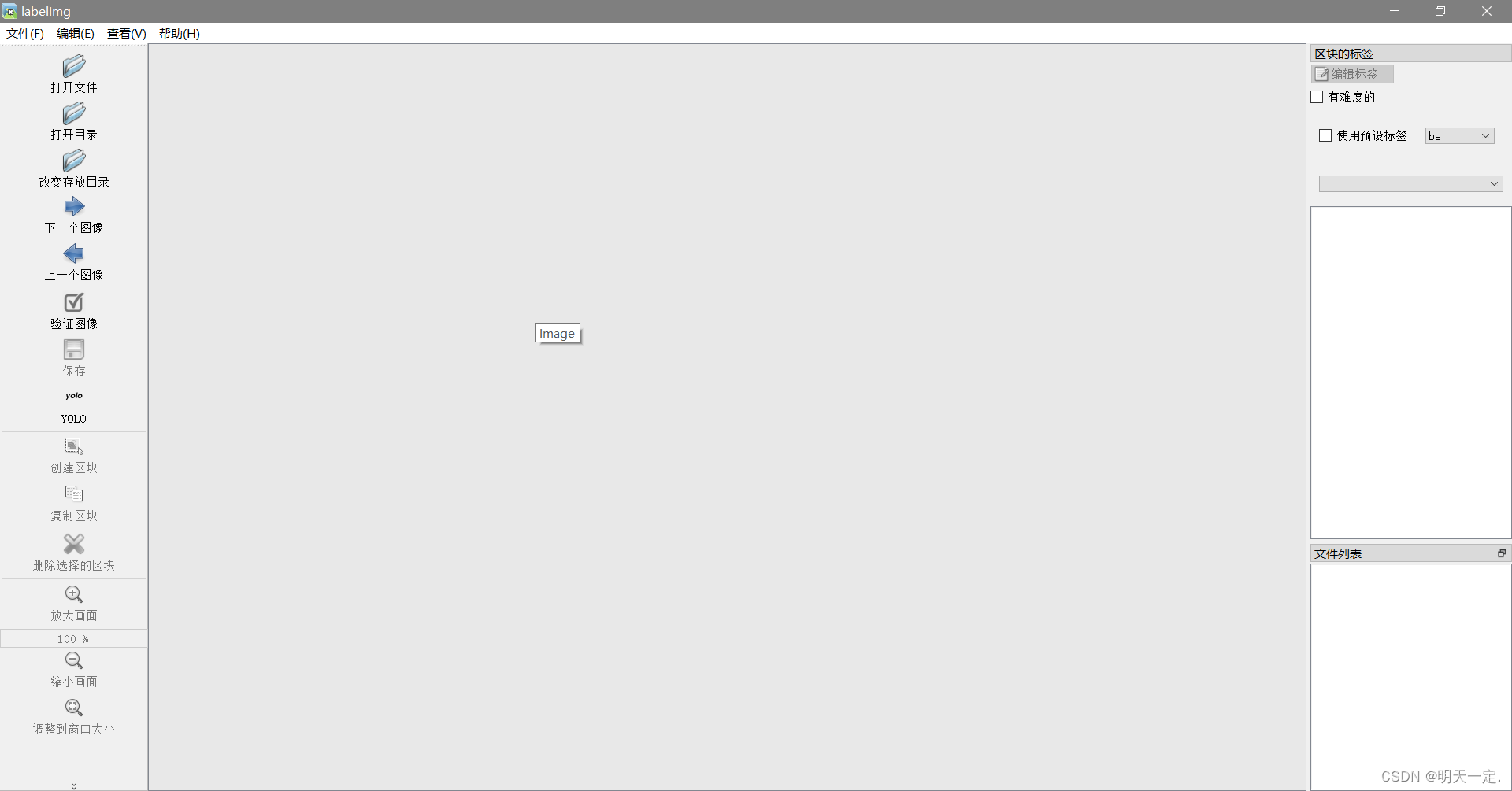
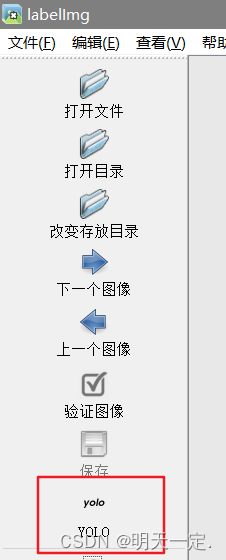
We directly open directory(Referring to your store catalog images),And then change storage directory(指的是你的label目录),重要的是:Don't forget toyolo.Labeling techniques:w是标注,d是下一张
And now your
This directory should be something(除了yaml文件还没写)
7.训练
多么痛的领悟,I use my computer training for a day, also didn't finish my training.
我选择使用 colab去训练(Need a Google account,需要翻墙)
Colaboratory 简称“Colab”,Google Research 团队开发,任何人都可以通过浏览器编写和执行任意 Python 代码,Especially suitable for machine learning、数据分析、教育目的.Colab 是一种托管式 Jupyter 笔记本服务,用户无需设置,就可直接使用,还能免费使用 GPU/TPU计算资源.
I account abnormal,Unable to capture detail:Colaboratory( 简称"Colab")介绍与使用 - 知乎
简单来说就是创建 Colaboratory,Then mount the file,把yolo_APack up there,And then in the above decompression
,搭建yolov5环境,选择GPU之后,Can train like in the local model.
Training need to use the aboveA.yaml.Case writing
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/] train: ../yolo_A/images/ val: ../yolo_A/images/ # number of classes 类型的数量,Several types of name will fill a few nc: 1 # class names 类型的名字,可以有多个 names: ['be']
Training model code example:yolov5s.pt可以在Releases · ultralytics/yolov5 · GitHub找到并下载
python train.py --img 640 --batch 54 --epochs 100 --data A.yaml --weights yolov5s.pt --nosave --cache
Training the documents we needbest.pt,在yolov5-master\runs\train里边.Direct to get the local use.
8.预测
因为我需要To predict the result after,以及我传进去的是cv2.imread()后的numpy数组,所以我对detect源码文件的runDo the downsizing and modify the function.The revised file is redundant,因为我只是玩玩,So don't waste time sorting code,大家参考即可.新增的imMyParameter is introduced to an array of,source没啥用,But you have to pass in a local existence of the image path(The redundancy,没修改)
# YOLOv5 by Ultralytics, GPL-3.0 license
"""
Run inference on images, videos, directories, streams, etc.
Usage - sources:
$ python path/to/detect.py --weights yolov5s.pt --source 0 # webcam
img.jpg # image
vid.mp4 # video
path/ # directory
path/*.jpg # glob
'https://youtu.be/Zgi9g1ksQHc' # YouTube
'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
Usage - formats:
$ python path/to/detect.py --weights yolov5s.pt # PyTorch
yolov5s.torchscript # TorchScript
yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s.xml # OpenVINO
yolov5s.engine # TensorRT
yolov5s.mlmodel # CoreML (macOS-only)
yolov5s_saved_model # TensorFlow SavedModel
yolov5s.pb # TensorFlow GraphDef
yolov5s.tflite # TensorFlow Lite
yolov5s_edgetpu.tflite # TensorFlow Edge TPU
"""
import argparse
import os
import platform
import sys
from pathlib import Path
import numpy as np
import torch
import torch.backends.cudnn as cudnn
from utils.augmentations import letterbox
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from models.common import DetectMultiBackend
from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams
from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr, cv2,
increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh)
from utils.plots import Annotator, colors, save_one_box
from utils.torch_utils import select_device, time_sync
@torch.no_grad()
def run(
imMy = None,
weights=ROOT / 'yolov5s.pt', # model.pt path(s)
source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam
data=ROOT / 'data/coco128.yaml', # dataset.yaml path
imgsz=(640, 640), # inference size (height, width)
conf_thres=0.25, # confidence threshold
iou_thres=0.45, # NMS IOU threshold
max_det=1000, # maximum detections per image
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
classes=None, # filter by class: --class 0, or --class 0 2 3
agnostic_nms=False, # class-agnostic NMS
augment=False, # augmented inference
visualize=False, # visualize features
hide_labels=False, # hide labels
hide_conf=False, # hide confidences
half=False, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
):
source = str(source)
# Load model
device = select_device(device)
print(device)
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
stride, names, pt = model.stride, model.names, model.pt
imgsz = check_img_size(imgsz, s=stride) # check image size
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt)
bs = 1 # batch_size
# Run inference
model.warmup(imgsz=(1 if pt else bs, 3, *imgsz)) # warmup
for path, im, im0s, vid_cap, s in dataset:
im0s = imMy
# Padded resize
img = letterbox(im0s, (800,608), stride=32, auto=True)[0]
# Convert
img = img.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
img = np.ascontiguousarray(img)
im = img
im = torch.from_numpy(im).to(device)
im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
if len(im.shape) == 3:
im = im[None] # expand for batch dim
# Inference
visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
pred = model(im, augment=augment, visualize=visualize)
# pred = model(im, augment=augment, visualize=False)
# NMS
pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
# Second-stage classifier (optional)
# pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
# Process predictions
res = []
for i, det in enumerate(pred): # per image
im0 = im0s.copy()
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
# Write results
for *xyxy, conf, cls in reversed(det):
parm = []
c = int(cls)
label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f}')
p1, p2 = (int(xyxy[0]), int(xyxy[1])), (int(xyxy[2]), int(xyxy[3]))
parm.append(label)
parm.append(p1)
parm.append(p2)
res.append(parm)
return res
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)')
parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path')
parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold')
parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='show results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--visualize', action='store_true', help='visualize features')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference')
parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference')
opt = parser.parse_args()
opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
print_args(vars(opt))
return opt
def main(opt):
check_requirements(exclude=('tensorboard', 'thop'))
run(**vars(opt))
if __name__ == "__main__":
opt = parse_opt()
main(opt)
使用:
res = detect.run(weights='./dnf/best.pt',source="yolo_A/images/2a.jpg",data="yolo_A/A.yaml",imgsz=(800, 608),
imMy=imm)这样,Combined with the front real-time capture desktop,Most function can be achieved.
基于gpu预测
In the end I abandon predict too slow,想指定GPU预测,But found that has beenfalse
print(torch.cuda.is_available()) // False
然后我安装了cuda,参考:CUDA安装教程(超详细)_Billie使劲学的博客-CSDN博客_cuda安装
Then from the virtual environment uninstalltorch和torchversion(pip uninstall一下即可)
从Start Locally | PyTorchFind your computer version,以下是我的
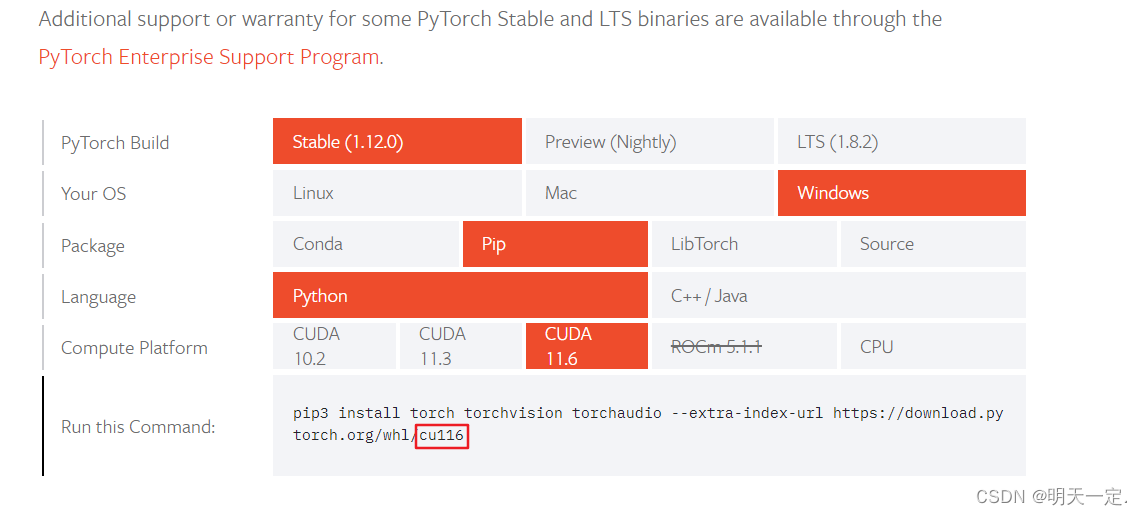
然后从https://download.pytorch.org/whl/torch_stable.html安装wheel文件
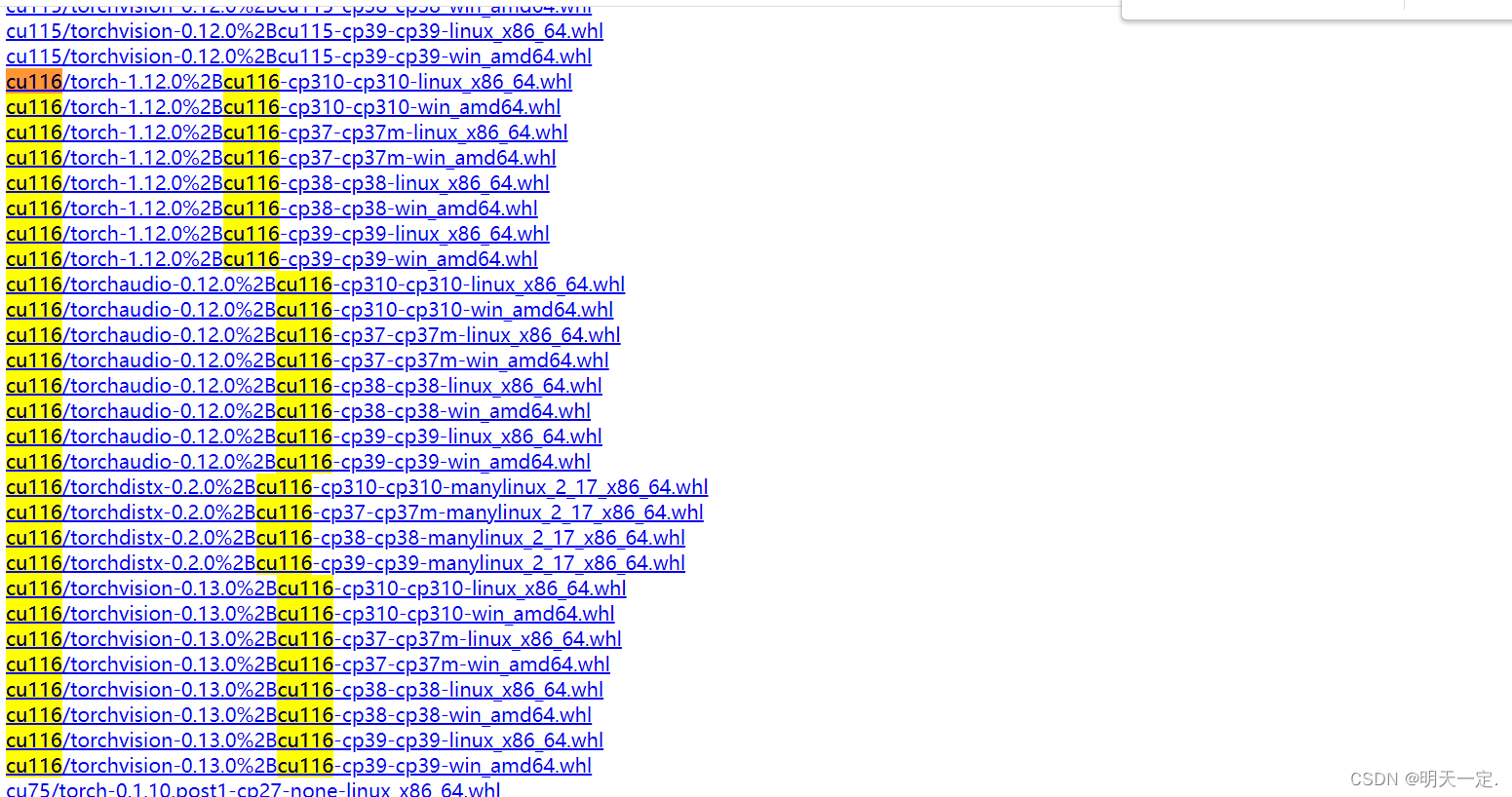
安装torch和torchvision,具体安装cp多少(I'm a according to the installationyolo环境时pip install -r requirements.txtWhen the console print setuptorch对应的cp)
然后安装wheel文件.
运行发现
print(torch.cuda.is_available()) // True
我的版本deviceSpecified as empty andgpuWhen available, choosegpu
完结撒花.
Driver stage keyboard bypass game testing
Look up a lot of blog driver stage operation,Even add group didn't ask out ask someone else to do,真...
The last try to early in the morning,Nonsense not say directly on the right case,需要用到pywin32,自己pip一下(The runtime needs administrator to run)
import time
import win32api
import win32con
import ctypes
import win32gui
VK_CODE = {
'backspace': 0x08,
'tab': 0x09,
'clear': 0x0C,
'enter': 0x0D,
'shift': 0x10,
'ctrl': 0x11,
'alt': 0x12,
'pause': 0x13,
'caps_lock': 0x14,
'esc': 0x1B,
'spacebar': 0x20,
'page_up': 0x21,
'page_down': 0x22,
'end': 0x23,
'home': 0x24,
'left_arrow': 0x25,
'up_arrow': 0x26,
'right_arrow': 0x27,
'down_arrow': 0x28,
'select': 0x29,
'print': 0x2A,
'execute': 0x2B,
'print_screen': 0x2C,
'ins': 0x2D,
'del': 0x2E,
'help': 0x2F,
'0': 0x30,
'1': 0x31,
'2': 0x32,
'3': 0x33,
'4': 0x34,
'5': 0x35,
'6': 0x36,
'7': 0x37,
'8': 0x38,
'9': 0x39,
'a': 0x41,
'b': 0x42,
'c': 0x43,
'd': 0x44,
'e': 0x45,
'f': 0x46,
'g': 0x47,
'h': 0x48,
'i': 0x49,
'j': 0x4A,
'k': 0x4B,
'l': 0x4C,
'm': 0x4D,
'n': 0x4E,
'o': 0x4F,
'p': 0x50,
'q': 0x51,
'r': 0x52,
's': 0x53,
't': 0x54,
'u': 0x55,
'v': 0x56,
'w': 0x57,
'x': 0x58,
'y': 0x59,
'z': 0x5A,
'numpad_0': 0x60,
'numpad_1': 0x61,
'numpad_2': 0x62,
'numpad_3': 0x63,
'numpad_4': 0x64,
'numpad_5': 0x65,
'numpad_6': 0x66,
'numpad_7': 0x67,
'numpad_8': 0x68,
'numpad_9': 0x69,
'multiply_key': 0x6A,
'add_key': 0x6B,
'separator_key': 0x6C,
'subtract_key': 0x6D,
'decimal_key': 0x6E,
'divide_key': 0x6F,
'F1': 0x70,
'F2': 0x71,
'F3': 0x72,
'F4': 0x73,
'F5': 0x74,
'F6': 0x75,
'F7': 0x76,
'F8': 0x77,
'F9': 0x78,
'F10': 0x79,
'F11': 0x7A,
'F12': 0x7B,
'F13': 0x7C,
'F14': 0x7D,
'F15': 0x7E,
'F16': 0x7F,
'F17': 0x80,
'F18': 0x81,
'F19': 0x82,
'F20': 0x83,
'F21': 0x84,
'F22': 0x85,
'F23': 0x86,
'F24': 0x87,
'num_lock': 0x90,
'scroll_lock': 0x91,
'left_shift': 0xA0,
'right_shift ': 0xA1,
'left_control': 0xA2,
'right_control': 0xA3,
'left_menu': 0xA4,
'right_menu': 0xA5,
'browser_back': 0xA6,
'browser_forward': 0xA7,
'browser_refresh': 0xA8,
'browser_stop': 0xA9,
'browser_search': 0xAA,
'browser_favorites': 0xAB,
'browser_start_and_home': 0xAC,
'volume_mute': 0xAD,
'volume_Down': 0xAE,
'volume_up': 0xAF,
'next_track': 0xB0,
'previous_track': 0xB1,
'stop_media': 0xB2,
'play/pause_media': 0xB3,
'start_mail': 0xB4,
'select_media': 0xB5,
'start_application_1': 0xB6,
'start_application_2': 0xB7,
'attn_key': 0xF6,
'crsel_key': 0xF7,
'exsel_key': 0xF8,
'play_key': 0xFA,
'zoom_key': 0xFB,
'clear_key': 0xFE,
'+': 0xBB,
',': 0xBC,
'-': 0xBD,
'.': 0xBE,
'/': 0xBF,
';': 0xBA,
'[': 0xDB,
'\\': 0xDC,
']': 0xDD,
"'": 0xDE,
'`': 0xC0}
# handle = win32gui.FindWindow(None, '地下城与勇士')
# win32gui.SetForegroundWindow(handle)
while True:
time.sleep(5)
MapVirtualKey = ctypes.windll.user32.MapVirtualKeyA
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_8"], win32api.MapVirtualKey(VK_CODE["numpad_8"], 0), 0, 0) # 0
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_8"], win32api.MapVirtualKey(VK_CODE["numpad_8"], 0), win32con.KEYEVENTF_KEYUP, 0)
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_5"], win32api.MapVirtualKey(VK_CODE["numpad_5"], 0), 0, 0) # 0
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_5"], win32api.MapVirtualKey(VK_CODE["numpad_5"], 0), win32con.KEYEVENTF_KEYUP,
0)
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_4"], win32api.MapVirtualKey(VK_CODE["numpad_4"], 0), 0, 0) # 0
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_4"], win32api.MapVirtualKey(VK_CODE["numpad_4"], 0), win32con.KEYEVENTF_KEYUP, 0)
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_6"], win32api.MapVirtualKey(VK_CODE["numpad_6"], 0), 0, 0) # 0
time.sleep(0.3)
win32api.keybd_event(VK_CODE["numpad_6"], win32api.MapVirtualKey(VK_CODE["numpad_6"], 0), win32con.KEYEVENTF_KEYUP, 0)
# win32api.keybd_event(0x0D, 0, 0, 0) # enter
# win32api.keybd_event(0x0D, 0, win32con.KEYEVENTF_KEYUP, 0)
边栏推荐
- CTF命令执行题目解题思路
- go context 包
- 「X」to「Earn」:赛道现状与破局思路
- Summary of @Transactional transaction invocation and effective scenarios
- kubernetes pod podsecurityPolicies(PSP)
- hi!Don't look at how to SAO gas dye-in-the-wood in MySQL?
- 采用QT进行OpenGL开发(三)着色器编程
- 【TypeScript】深入学习TypeScript类(上)
- FRED应用:激光二极管光源耦合到光纤的仿真
- CentOS7 安装MySQL 图文详细教程
猜你喜欢
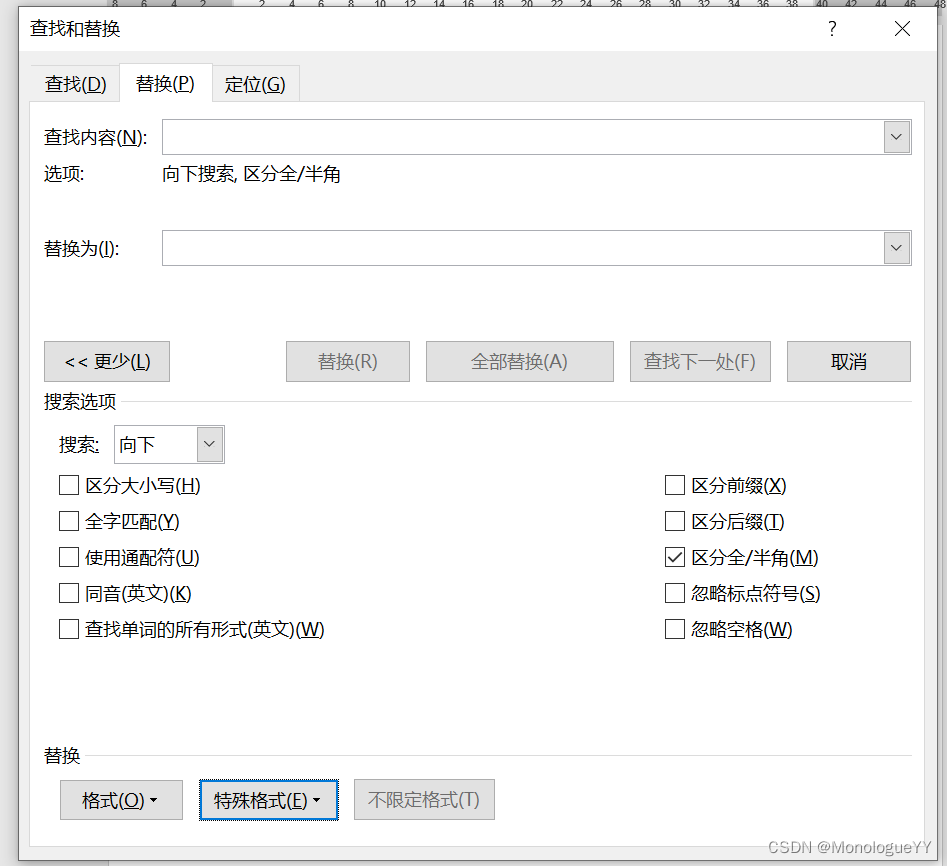
word操作:单独调整英文字体
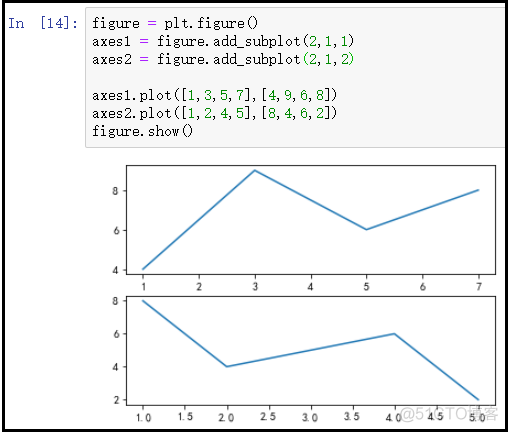
Matplotlib drawing core principles explain (more detailed)
图像识别从零写出dnf脚本关键要点
If the watermark according to how to realize the function

Interviewer: can you talk about optimistic locking and pessimistic locks

kubernetes pod podsecurityPolicies(PSP)
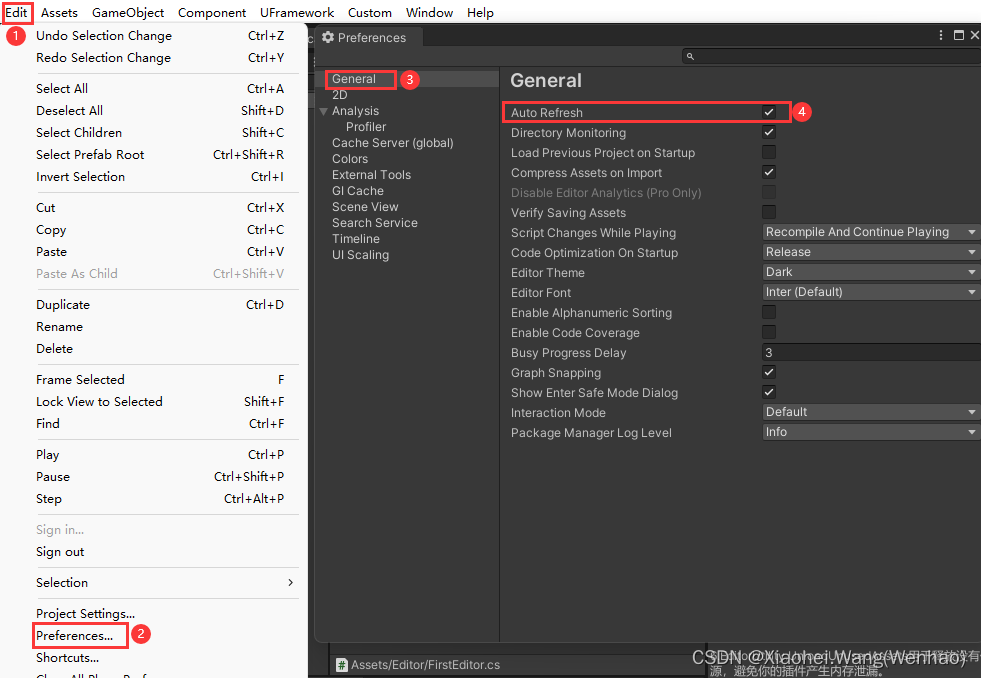
VS保存后Unity不刷新
Jmeter二次开发实现rsa加密

ROS2初级知识(9):bag记录过程数据和重放

JS Date 时间戳 getTune data.parse 倒计时小程序
随机推荐
Command line startup FAQs and solutions
You and I will meet the needs of: how to export the data in a MySQL simple ~!Practical!
【DEBUG】ImportError: Unable to import required dependencies: numpy: DLL load failed: 找不到指定的模块。
Jmeter二次开发实现rsa加密
总数据量超万亿行,玉溪卷烟厂通过正确选择时序数据库轻松应对
Yocto系列讲解[实战篇]85 - 制作ubi镜像和自动挂载ubifs文件系统
In-depth study TypeScript TypeScript 】 【 class (under)
牛客刷题:手动实现数组filter方法
双轴晶体中的锥形折射
gdb调试简要总结
执子手,到永恒
B站回应“HR 称核心用户都是 Loser”:该面试官去年底已被劝退,会吸取教训加强管理
在软件测试行业近20年的我,再来和大家谈谈今日的软件测试
图像识别从零写出dnf脚本关键要点
七夕到了——属于程序员的浪漫
双轴晶体中锥形折射的建模与应用
ZCMU--5230: 排练方阵(C语言)
Tanabata is here - the romance of programmers
MySQL 与InnoDB 下的锁做朋友 (四)行锁/记录锁
【使用pyside2遇到的问题】This application failed to start because no Qt platform plugin could be initialized.