当前位置:网站首页>【飞控开发高级教程3】疯壳·开源编队无人机-定高、定点、悬停
【飞控开发高级教程3】疯壳·开源编队无人机-定高、定点、悬停
2022-08-03 19:43:00 【efans_Mike】
COCOFLY教程
——疯壳·无人机·系列
定高、定点、悬停

图1
一、“定高定点悬停”功能简介
定高定点悬停是衡量一个飞控性能的一个重要参数。只有支持定高定点悬停,才能让无人机稳定地停留在空中不动,才能够实现更多的附加功能,例如航拍等。试想如果无人机左右摇摆,时而往左,时而往右,怎么能够实现航拍呢?
COCOFLY 支持定高定点悬停模式,默认出厂的时候已经设置为激光定高、光流定点,从而可以让飞机稳定悬停空中。
使用遥控设置 COCOFLY 为定高定点悬停的的方法如下,打开遥控与飞机, 确保两则是连上的,然后按下遥控右按键,进入菜单选项,选择“1.飞控设置”, 进入到飞控设置界面,然后把“1.激光定高”打开,具体方法是在“1.激光定高” 处,把右摇杆往右掰,等“否”变为“是”,才按下右摇杆的右按键,可以看到界面回到了主菜单,并且出现了“设置成功”字样。如果“设置失败”,可能是没有连接上飞机。然后再重复同样的步骤进入到飞控设置界面,往下拨到到“6. 光流定点”,然后用同样的方法,打开即可。如下图所示。

图2
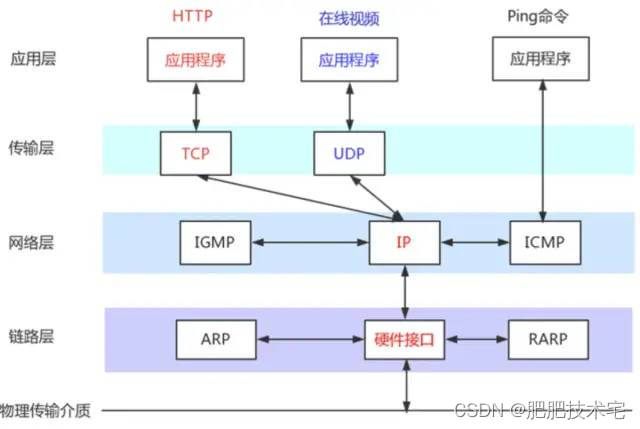
二、代码相关
目前悬停的逻辑是,有激光定高优先使用激光定高、否则使用气压计定高; 定点使用的是光流模块,通过判断无人机的位移,实现定点。
光流数据获取的代码如下图所示。

图3
气压计和激光定高处理部分代码如下图所示。

图4
更多完整学习资料和对应开源套件,请登陆官网:“疯壳”
如需定制开发,请通过官网“疯壳”网页底部的“联系我们”进行联系
边栏推荐
- Brush the topic of mobile zero power button
- Interview Blitz: What Are Sticky Packs and Half Packs?How to deal with it?
- Unity获取canvas 下ui 在屏幕中的实际坐标
- Postgresql源码(65)新快照体系Globalvis工作原理分析
- 边缘盒子+时序数据库,美的数字化平台 iBuilding 背后的技术选型
- Internet Download Manager简介及下载安装包,IDM序列号注册问题解决方法
- 那些年我写过的语言
- 怎么将自己新文章自动推送给自己的粉丝(巨简单,学不会来打我)
- 阿洛的反思
- Postgresql-xl global snapshot and GTM code walking (branch line)
猜你喜欢




随机推荐
Redis 内存满了怎么办?这样置才正确!
X86函数调用模型分析
Postgresql source code (64) Query execution - data structure and execution process before submodule Executor (2) execution
多模态 参考资料汇总
阿里巴巴政委体系-第九章、阿里政委启示录
flex布局
建模该从哪一步开始?给你分析,给零基础的你一些学习建议
Postgresql源码(65)新快照体系Globalvis工作原理分析
JWT详解
net-snmp私有mib动态加载到snmpd
The effective square of the test (one question of the day 7/29)
力扣刷题之有效的正方形(每日一题7/29)
【夜莺监控方案】08-监控msyql集群(prometheuse+n9e+mysqld_exporter)
力扣解法汇总899-有序队列
Postgresql中的pg_memory_barrier_impl和C的volatile
node版本切换工具NVM以及npm源管理器nrm
高位套牢机构,用友网络的信任危机是如何产生的?
LeetCode 622. 设计循环队列
MySQL Basics
Unity获取canvas 下ui 在屏幕中的实际坐标