当前位置:网站首页>[UAV] gyroscope data analysis, taking Victor intelligent jy901b as an example
[UAV] gyroscope data analysis, taking Victor intelligent jy901b as an example
2022-06-30 04:35:00 【Zhao-Jichao】
List of articles
JY901B- Information details - Witt intelligence
brief introduction
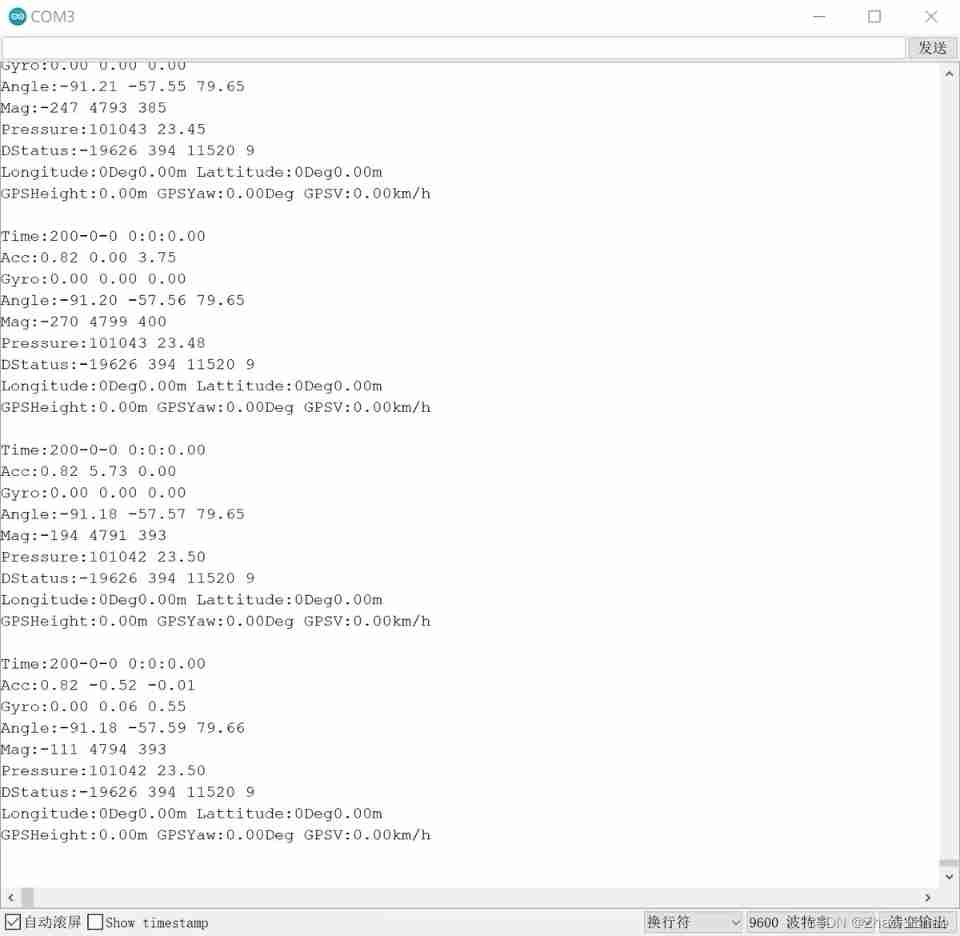
The data information that can be measured mainly includes the following parts :
- Triaxial acceleration
- Three axis gyroscope
- Triaxial angle
- Triaxial magnetic field
- pressure + Height
- 200Hz Comes back

Information accuracy and output information mainly include :
Angular accuracy : dynamic 0.1 ° 0.1\degree 0.1° static state 0.05 ° 0.05\degree 0.05°
Magnetic field accuracy : 1 m g 1mg 1mg
Height accuracy : 0.5 0.5 0.5
Return rate : 0.1 H z 0.1Hz 0.1Hz ~ 200 H z 200Hz 200Hz Adjustable
Output content : The acceleration 、 gyroscope 、 Euler Angle 、 The magnetic field 、 Four yuan number 、 Time 、 Port status
range : The acceleration : ± 16 g \pm 16g ±16g, angular velocity : ± 2000 ° / s \pm 2000\degree/s ±2000°/s, angle : ± 180 ° \pm 180\degree ±180°
1 The acceleration Acceleration
The acceleration is the ratio of the change in velocity to the time taken for this change to occur Δ v / Δ t \Delta v / \Delta t Δv/Δt, It is a physical quantity that describes the speed change of an object , The common unit is m / s 2 m/s^2 m/s2 ( rice / Square second ).
2 gyroscope Gyroscope
Motion has six degrees of freedom : Translate in three orthogonal directions and rotate around three orthogonal axes . The latter three are measured by angular velocity sensor , Also called gyroscope (gyroscope Or for short gyro). The basic principle of gyroscope is Newton's second law , Like an acceleration sensor . If you add rotation to Newton's equation , There will be virtual forces , The mathematical term is Coriolis force . The working principle of gyroscope is to convert rotation into Coriolis force . The gyroscope requires a main motion or a feed motion , Coriolis force is the result of two orthogonal motions , And orthogonal to both .
3 Euler Angle Euler angles
【 control 】 Attitude angle analysis of four rotor UAV
Euler angle consists of three numbers , Each number represents the angle of rotation around a coordinate axis . Euler angle also has different ways of writing and expression .
The rotation order of Euler angle cannot be changed at will , Pay attention to the reference coordinate system when describing . Essentially because : The linear transformation does not satisfy the commutative law of multiplication .
4 The magnetic field Magnetic
Gauss is short for high , yes CGS A unit of magnetic induction or flux in a system , In memory of the German mathematician Karl · Friedrich · Gauss , Common symbols G G G or G s Gs Gs Express .
If it is placed in a magnetic field with uniform magnetic induction , A long straight wire with a direction perpendicular to the direction of magnetic induction intensity is in communication 1 Electromagnetic unit (emu) Steady current ( be equal to 10 Ampere ) when , The electromagnetic force on the conductor per centimeter of length is 1 Dyne , Then the magnetic induction intensity is defined as 1 gaussian .
The unit of magnetic induction in Gauss and SI units, Tesla (T) The conversion relationship is :
- 1 G = 1×10-4 T=0.1 mT
- 1 T = 10000 G
The intensity of the magnetic field on the equator of the earth's surface is about 0.29~0.40 gaussian , The magnetic field strength of the geomagnetic north pole is 0.61 gaussian , The magnetic field intensity of the geomagnetic south pole is 0.68 gaussian .
5 Four yuan number Quaternion
The unit is 4 yuan (Unit quaternion) It can be used to represent rotation in three-dimensional space . It is different from the other two commonly used expressions ( Three dimensional orthogonal matrix and Euler angle ) It is equivalent. , But it avoids the problem of universal lock in Euler angle representation . Compared with three-dimensional orthogonal matrix representation , Quaternion representation can more conveniently give the rotation axis and rotation angle .
6 Time
7 Port status
Supplementary knowledge
Ref:
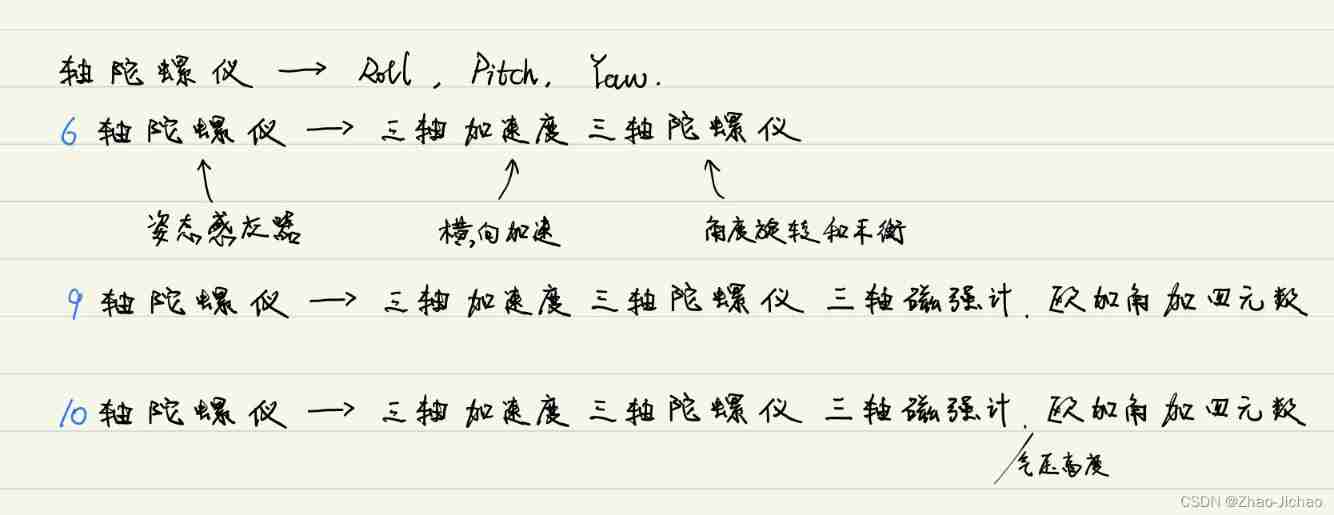
- About 3、6、9、10 The difference and definition of axis attitude gyroscope
- gyroscope
- Read gyroscope sensor : Navigation 、 Drones and cars that never fall are inseparable from it !- Know about columns
- Data processing of gyroscope - Know about columns
- Accelerometer 、 Working principle of gyroscope and data fusion
- Back to the basics —— Understand geometric rotation and Euler angle
- Can the rotation order of Euler angle be changed ?
- How to explain Euler angle popularly ? Then why introduce quaternions ?
- The magnetic field
- Three dimensional rotation representation - Euler angle 、 Rotation matrix 、 Rotation vector 、 Quaternion
- How to understand quaternion vividly ?- Know about columns
- Vision SLAM The foundation of mathematics in Second articles Four yuan number
边栏推荐
- File system and directory operations
- IO stream, byte stream read / write copy
- Redis实现短信登入功能(一)传统的Session登入
- Differences between cookies and sessions
- FortiGate firewall configuration log uploading regularly
- Introduction to system programming
- Equity interest [non DP]
- 2021-11-04
- Myrpc version 1
- Summary of the reasons why transactional doesn't work
猜你喜欢

Redis implements SMS login function (I) traditional session login

Mongodb learning

Learn about threads

Es2017 key summary
![[FPGA] IIC读写EEPROM 的实现](/img/6a/36e9355058a90d98cffafcbaa1930b.png)
[FPGA] IIC读写EEPROM 的实现

Redis实现短信登入功能(二)Redis实现登入功能

Basic knowledge of redis

Intern method of string

Robot slam navigation core technology and practice Season 1: Chapter 0_ Slam development overview

Redis sentry, persistence, master-slave, hand tear LRU
随机推荐
Network layer protocol hardware
Anonymous pipeline for interprocess communication
Refers to the difference between IP and *ip at output
Learning about signals
Intern method of string
iMile 利用 Zadig 多云环境周部署千次,跨云跨地域持续交付全球业务
Interview topic of MySQL
Stack implementation integrated Calculator - code implementation
Fair lock and unfair lock
Read / write lock example
2021-07-14
【WEBRTC】ADM: rtc_include_internal_audio_device 触发 RTC_DCHECK(adm) 断言
Paging query, using jdbc-- paging query
【WEBRTC】ADM: rtc_ include_ internal_ audio_ Device triggers RTC_ Dcheck (ADM) assertion
网络层详解
FortiGate firewall configuration link detection link monitor and status query
FortiGate firewall and Aruze cloud tunnel interruption
Junior students summarize JS basic interview questions
If you encounter problems when using spark for the first time, please ask for help
股票利益【非dp】