当前位置:网站首页>Understanding and distinguishing of some noun concepts in adjustment / filtering
Understanding and distinguishing of some noun concepts in adjustment / filtering
2022-07-03 00:54:00 【Wandering pigs save the earth】
List of articles
One 、 Definition of noun
1、 The meaning of estimation or adjustment
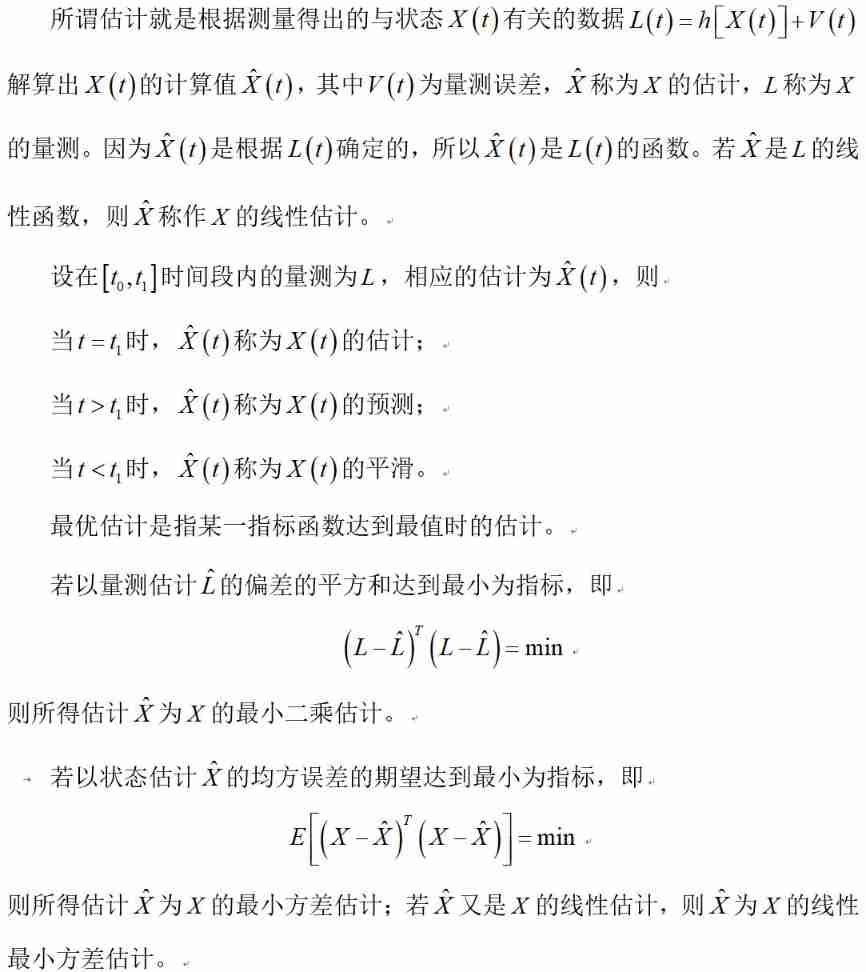
The probability of occurrence of the estimated value can also be used as the estimation index , Such an estimate has a maximum a posteriori estimate 、 Bayesian estimation and maximum likelihood estimation .
2、 About parameter types
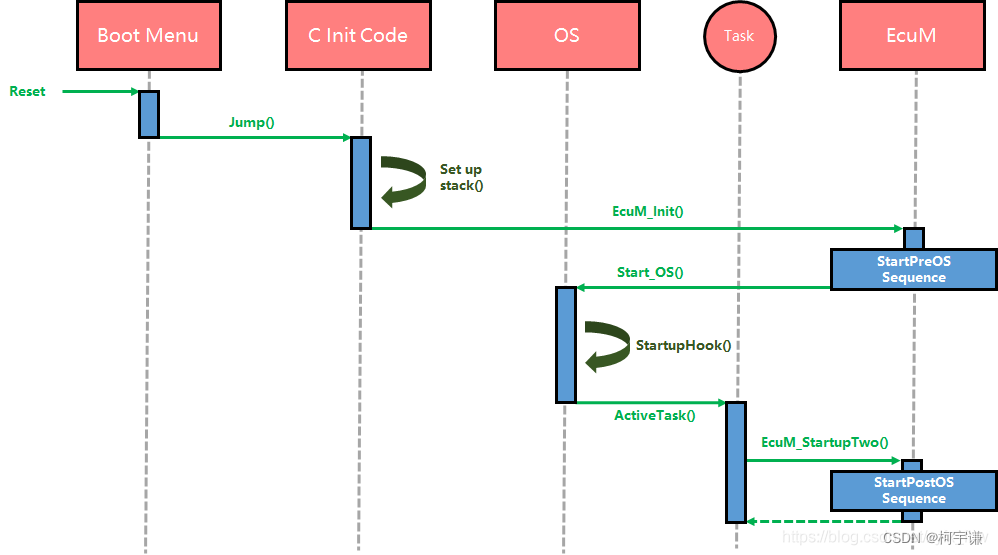
There are generally two kinds of parameters that need to be determined for the best valuation : One is non random and unknown a priori statistical properties , Or the priori statistical properties are known , But parameters that are not taken into account when calculating the valuation ; The second is to know its prior statistical properties , And consider the parameters of this property when calculating its valuation . To make a distinction , The first parameter is still called parameter , Or propensity parameter , It is the unknown in the least square adjustment ; The second parameter is called signal , Signals are also divided into signals that establish a functional model with the observation vector ( Filtered signal ), The other is the signal that does not establish a functional model with the observation vector ( Estimated signal ).
The above text is drawn into a diagram, which is roughly as follows :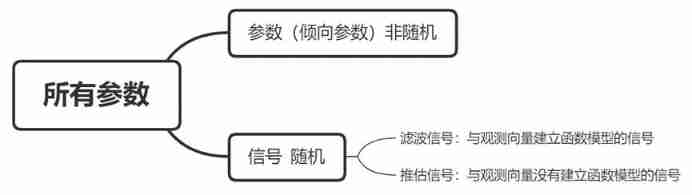
3、 About data processing methods
simply , Adjustment means that only inclination parameters are considered ( Non random parameter ), Filtering refers to considering signals ( Random parameter ), Configuration refers to considering both tendency parameters ( Non random parameter ) Consider the signal ( Random parameter ).
- Least squares estimate : Least squares estimation is a kind of utilization with errors ( Or noise ) The method of finding the best estimation of the determined parameters based on the observed values of . This “ The best ” It refers to that the square sum of the deviation between the estimated equivalent measured value and the observed value of the measured value reaches the minimum , At this time, it is considered that the obtained parameter estimation is the best .“ least square ” It means that the square sum of the observed value and the estimated value of the measured value reaches the minimum .
- Minimum variance estimation : Minimum variance estimation is an estimation method based on the minimum variance of estimation error , If the variance of this parameter estimate is smaller than that of other estimates , It is considered that this valuation is the optimal valuation .
- wave filtering : The original meaning of filtering is from the received electromagnetic wave signal , Eliminate the interference of various noises . For general data processing problems , Filtering is through the processing of a series of actual observation data with errors , The method of obtaining the best estimation of the required parameters . In the measurement adjustment , We regard filtering as a kind of utilization with errors ( Or noise ) The method of finding the best estimation of the determined parameters based on the observed values of . The difference between this method and least square adjustment is : The least square adjustment method treats all parameters to be estimated as non random quantities , Or do not consider the random nature of parameters , The best estimation is determined according to the classical and relevant least square principles ; Filtering takes all parameters as normal random variables , According to the maximum a posteriori estimation 、 The minimum variance estimation or the generalized least square principle is used to calculate the best estimation of the determined parameters . When the prior statistical properties of the known parameters are known , Because filtering takes this property into account , Therefore, the obtained estimate has higher accuracy than the least square adjustment estimate .
- To configure (Collocation) Also known as fitting estimation . Originally, it refers to a mathematical method that combines various data to study the shape of the earth and the gravity field , Its theory consists of Trarup On 1969 in . In the study of the gravity of the earth's shape , The general form of configuration is that its functional model includes random parts , It also contains non random parts ( Also known as tendency ). This kind of situation, which combines the determination of signal and tendency parameters, often occurs in other measurement adjustment problems , Problems such as adjustment with the principle of generalized least squares adjustment , So it is called least square collocation , It is called collocation method for short . Besides , In earth shape, gravity field and other adjustment problems , What often needs to be determined is the best estimation of the estimated signal and the best estimation of the tendency parameter , And the propensity parameter is often the coefficient of some fitting function , Therefore, collocation method is also called fitting estimation .
Understanding of maximum likelihood estimation and maximum a posteriori estimation :https://blog.csdn.net/Gou_Hailong/article/details/121404135
4、 Advantages, disadvantages and applicability of various data processing methods
Because the optimal indicators satisfied by various estimates are different , The information used is different , So the applicable object 、 The accuracy achieved and the complexity of calculation are different .
- Least squares estimation It is applicable to the estimation of constant vector or random vector . Because the best index used is to achieve the best accuracy of measurement estimation , It is unnecessary to use dynamic information and statistical information related to the estimated quantity in the estimation , Even the statistical information of measurement error may not be used , So the estimation accuracy is not high . The biggest advantage of this method is that the algorithm is simple , It can still be applied in the case of lack of understanding of the estimated quantity and measurement error , So it is still widely used .
- The minimum variance estimation is the estimation in which the mean square error of all estimates is the smallest , Is the best of all estimates . But this optimal estimation only determines the abstract relationship that the estimated value is the conditional mean of the estimated quantity in the measurement space . In general, the conditional mean must be obtained through the conditional probability density , The acquisition of conditional probability density itself is not easy , Therefore, it is very difficult to obtain the minimum variance estimation according to the general method of conditional mean .
- Linear minimum variance estimation Is the best of all linear estimates , Only when both the estimated quantity and the quantity measurement obey the normal distribution , Linear minimum variance estimation is equivalent to minimum variance estimation , That is, it is also the best in all estimates . Linear minimum variance estimation can be applied to the estimation of random processes , In the estimation process, we only need to know the first and second moments of the estimated quantity and the measured quantity . For stationary processes , These first and second moments are constant , But for nonstationary processes , The first and second moments change with time , You must know exactly one of every estimated moment 、 Only the second moment can we get the estimated value , This requirement is very demanding . Therefore, linear minimum variance estimation is suitable for stationary processes and difficult to apply to non-stationary processes . The more quantity measurements are used at different times in the estimation process , The higher the estimation accuracy , But the higher the order of matrix inversion , The greater the amount of calculation .
- Maximum a posteriori estimation 、 Bayesian estimation 、 Maximum likelihood estimation Are related to the conditional probability density , Except for some special distributions , Such as normal distribution , Calculation is very difficult . These estimates are often used in fault detection and identification algorithms .
- Wiener filtering It is a kind of linear minimum variance estimation . Wiener filter is a linear constant system , It is applicable to the processing of stationary random processes with zero mean value of both useful signals and interference signals . When designing Wiener filter, we must know the self power spectrum and cross power spectrum of useful signal and interference signal . When the power spectra are rational fractions , Burt can be used - Shannon design method obtains the transfer function of Wiener filter with filtering function . For complex useful signals and interference signals , The power spectrum is not rational , At this time, the power spectrum can be fitted into a rational spectrum and then press Bert - Shannon design . Compared with Kalman filter , Wiener filtering is applicable 、 There are many deficiencies in design methods , But for the case of less estimated parameters , If the helicopter hovers, it is only necessary to estimate the altitude , Combined with digital filtering technology , Wiener filtering is still a simple and effective method .
- Kalman filtering It is a linear minimum variance estimation , It has the following characteristics :1) The algorithm is recursive , The state space method is used to design the filter in time domain , Therefore, Kalman filter is suitable for the estimation of multidimensional stochastic processes .2) The dynamic change law of the estimated quantity is described by the dynamic equation, that is, the state equation , The dynamic statistical information of the estimated quantity is determined by the statistical information of the excited white noise and the dynamic equation . Because the excitation white noise is a stationary process , The kinetic equation is known , Therefore, the estimated quantity can be stable , It can also be non-stationary , That is, Kalman filter is also suitable for non-stationary processes .3) Kalman filter has two kinds of algorithms: continuous and discrete , The discrete algorithm can be implemented directly on a digital computer . Because of the above characteristics , Once the Kalman filter theory is put forward, it has been paid attention to in engineering application , Apollo moon landing spacecraft and C-5A The design of aircraft navigation system is the most successful in early application .
边栏推荐
- leetcode-224:基本计算器
- AttributeError: ‘tuple‘ object has no attribute ‘layer‘问题解决
- Meaning of Tencent cloud free SSL certificate extension file
- Kubernetes resource object introduction and common commands (V) - (NFS & PV & PVC)
- An excellent orm in dotnet circle -- FreeSQL
- How SQLSEVER removes data with duplicate IDS
- [AUTOSAR VI description document]
- 【案例分享】让新时代教育发展与“数”俱进
- matlab将数字矩阵保存为地理空间数据出错,显示下标索引必须为正整数类型或逻辑类型,解决
- 1.12 - 指令
猜你喜欢

![[AUTOSAR eight OS]](/img/ac/fbc84c077ff9c94c840e1871171d19.png)




随机推荐
[AUTOSAR VI description document]
瑞萨RZ/G2L 处理器简介|框架图|功耗|原理图及硬件设计指南
kubernetes资源对象介绍及常用命令(五)-(NFS&PV&PVC)
数组与集合性能比较
KingbaseES ALTER TABLE 中 USING 子句的用法
Infrared thermography temperature detection system based on arm rk3568
[case sharing] let the development of education in the new era advance with "number"
Shell implements basic file operations (SED edit, awk match)
Leetcode-2115: find all the dishes that can be made from the given raw materials
【C语言】分支和循环语句(上)
FPGA - 7系列 FPGA内部结构之Clocking -04- 多区域时钟
Thank you for being together for these extraordinary two years!
About qbytearray storage hexadecimal and hexadecimal conversion
Initial order of pointer (basic)
Linux软件:如何安装Redis服务
Use Jenkins II job
世平信息首席科学家吕喆:构建以数据和人员为中心的安全能力
Meaning of Tencent cloud free SSL certificate extension file
In the first half of 2022, there are 10 worth seeing, and each sentence can bring you strength!
[AUTOSAR I overview]