当前位置:网站首页>leetcode:98. 验证二叉搜索树
leetcode:98. 验证二叉搜索树
2022-06-30 06:46:00 【uncle_ll】
98. 验证二叉搜索树
来源:力扣(LeetCode)
链接: https://leetcode.cn/problems/validate-binary-search-tree/
给你一个二叉树的根节点 root ,判断其是否是一个有效的二叉搜索树。
有效 二叉搜索树定义如下:
- 节点的左子树只包含 小于 当前节点的数。
- 节点的右子树只包含 大于 当前节点的数。
- 所有左子树和右子树自身必须也是二叉搜索树。
示例 1:
输入:root = [2,1,3]
输出:true

示例 2:
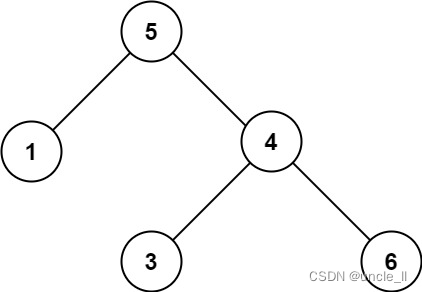
输入:root = [5,1,4,null,null,3,6]
输出:false
解释:根节点的值是 5 ,但是右子节点的值是 4 。
提示:
- 树中节点数目范围在 [ 1 , 1 0 4 ] [1, 10^4] [1,104] 内
- − 2 31 -2^{31} −231 <= Node.val <= 2 31 − 1 2^{31} - 1 231−1
解法
- 中序遍历+排序比较:二叉搜索树的中序遍历是有序序列,可以先进行中序遍历,然后再判断中序遍历序列是否有序的,且没有重复元素;
- 中序遍历递归过程中进行判断: 中序遍历的时候可以基于左子树的元素都要小于根节点这一性质进行判断,右子树的节点都要大于根节点;这里可以定义一个prev节点作为比较,然后递归进行中序遍历;
代码实现
中序遍历+排序后比较
python实现
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def isValidBST(self, root: Optional[TreeNode]) -> bool:
res = []
if not root:
return True
def helper(node):
if not node:
return node
helper(node.left)
res.append(node.val)
helper(node.right)
helper(root)
return res == sorted(res) and len(set(res)) == len(res)
c++实现
/** * Definition for a binary tree node. * struct TreeNode { * int val; * TreeNode *left; * TreeNode *right; * TreeNode() : val(0), left(nullptr), right(nullptr) {} * TreeNode(int x) : val(x), left(nullptr), right(nullptr) {} * TreeNode(int x, TreeNode *left, TreeNode *right) : val(x), left(left), right(right) {} * }; */
class Solution {
private:
vector<int> res;
public:
TreeNode* helper(TreeNode* node) {
if (node == nullptr)
return node;
helper(node->left);
res.push_back(node->val);
helper(node->right);
return node;
}
bool isValidBST(TreeNode* root) {
helper(root);
vector<int> res_copy = res;
sort(res.begin(), res.end());
set<int> s;
for (int v: res_copy) {
s.insert(v);
}
return res_copy == res && res_copy.size() == s.size();
}
};
复杂度分析
- 时间复杂度: O ( N l o g N ) O(NlogN) O(NlogN) 排序需要的时间
- 空间复杂度: O ( N ) O(N) O(N)
中序遍历
python实现
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val=0, left=None, right=None):
# self.val = val
# self.left = left
# self.right = right
class Solution:
def __init__(self):
self.prev = None
def isValidBST(self, root: Optional[TreeNode]) -> bool:
if not root:
return True
if not self.isValidBST(root.left):
return False
if self.prev and self.prev.val >= root.val: # 如果中序遍历得到的节点的值小于等于前一个 inorder,说明不是二叉搜索树
return False
self.prev = root
return self.isValidBST(root.right)
c++实现
/** * Definition for a binary tree node. * struct TreeNode { * int val; * TreeNode *left; * TreeNode *right; * TreeNode() : val(0), left(nullptr), right(nullptr) {} * TreeNode(int x) : val(x), left(nullptr), right(nullptr) {} * TreeNode(int x, TreeNode *left, TreeNode *right) : val(x), left(left), right(right) {} * }; */
class Solution {
private:
TreeNode* prev = nullptr;
public:
bool isValidBST(TreeNode* root) {
if (root == nullptr)
return true;
if (not isValidBST(root->left))
return false;
if (prev != nullptr && prev->val >= root->val) // 如果中序遍历得到的节点的值小于等于前一个 inorder,说明不是二叉搜索树
return false;
prev = root;
return isValidBST(root->right);
}
};
复杂度分析
- 时间复杂度: O ( N ) O(N) O(N)
- 空间复杂度: O ( N ) O(N) O(N)
参考
边栏推荐
猜你喜欢










随机推荐
【我的创作纪念日】一周年随笔
1.9 - Cache
tomorrow! "Mobile cloud Cup" competition air publicity will start!
Arrangement of in-depth learning materials
Ls1028 manual
File transfer protocol, FTP file sharing server
Subnet division and subnet summary
Write a C program to judge whether the system is large end byte order or small end byte order
It turns out that you are such an array. You have finally learned
Bat usage details 2
关注这场直播,了解能源行业双碳目标实现路径
HCIA day 1
1.3 - Code System
HuaWei满级大牛首次分享出这份598页网络协议全彩手册
The 40g high-efficiency cloud disk purchased by Alibaba cloud is only 20g attached
华泰炒股安全吗?我想网上开户。
Idea run SQL file
Notes: environment variables
C language: exercise 3
【模糊神经网络】基于模糊神经网络的移动机器人路径规划