当前位置:网站首页>李航《统计学习方法》笔记之感知机perceptron
李航《统计学习方法》笔记之感知机perceptron
2022-08-02 09:20:00 【timerring】
感知机(perceptron)
2.1 介绍
感知机(perceptron)是二类分类的线性分类模型,其输入为实例的特征向量,输出为实例的类别,取+1和-1二值。感知机对应于输入空间(特征空间)中将实例划分为正负两类的分离超平面,属于判别模型。感知机学习旨在求出将训练数据进行线性划分的分离超平面,为此,导入基于误分类的损失函数,利用梯度下降法对损失函数进行极小化,求得感知机模型。感知机学习算法具有简单而易于实现的优点,分为原始形式和对偶形式。感知机预测是用学习得到的感知机模型对新的输入实例进行分类。感知机1957年由Rosenblatt提出,是神经网络与支持向量机的基础。
结构为介绍感知机模型,感知机的学习策略,特别是损失函数,介绍感知机学习算法,包括原始形式和对偶形式,并证明算法的收敛性。
2.1.2总结summarization
1.一条直线不分错一个点,这就是好的直线。
2.模型要尽可能找到好的直线。
3.如果没有好的直线,在差的直线中找到较好的直线。
4.判断直线多差的方式:分错的点到直线的距离求和,距离越大则模型越差。
2.2 定义
(感知机) 假设输入空间(特征空间) 是 $\mathcal{X} \subseteq \mathbf{R}^{n} $, 输出空间是 $ \mathcal{Y}={+1,-1}$ 。输入 $ x \in \mathcal{X}$ 表示实例的特征向量, 对应于输入空间(特征空间)的点; 输出 $ y \in \mathcal{Y} $ 表示实例的类别。由输入空间到输出空间的如下函数:
KaTeX parse error: {align} can be used only in display mode.
称为感知机。其中, w 和 b 为感知机模型参数, w ∈ R n w \in \mathbf{R}^{n} w∈Rn 叫作权值 ( weight) 或权值向量 (weight vector), $b \in \mathbf{R} $ 叫作偏置 ( bias), $ w \cdot x $表示 w 和 x 的内积。 $\operatorname{sign} $是符号函数, 即
KaTeX parse error: {align} can be used only in display mode.
感知机是一种线性分类模型, 属于判别模型。感知机模型的假设空间是定义在 特征空间中的所有线性分类模型(linear classification model)或线性分类器(linear classifier), 即函数集合$ {f \mid f(x)=w \cdot x+b} $。
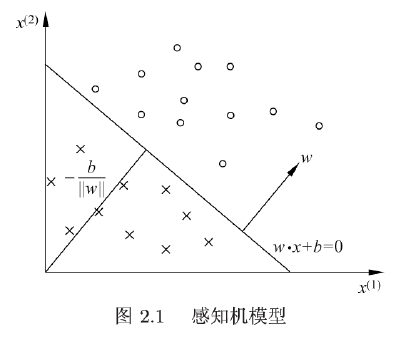
感知机有如下几何解释: 线性方程
w ⋅ x + b = 0 w \cdot x+b=0 w⋅x+b=0
2.3 参数说明
对应于特征空间 R n \mathbf{R}^{n} Rn 中的一个超平面 S , 其中w 是超平面的法向量, b 是超平面的截距。这个超平面将特征空间划分为两个部分。位于两部分的点 (特征向量) 分别被分为正、负两类。
特征空间也就是整个n维空间,样本的每个属性都叫一个特征,特征空间的意思是在这个空间中可以找到样本所有的属性组合。
因此, 超平面 S 称为分离超平面 (separating hyperplane), 如下图所示。
感知机学习, 由训练数据集 (实例的特征向量及类别)
T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \cdots,\left(x_{N}, y_{N}\right)\right\} T={ (x1,y1),(x2,y2),⋯,(xN,yN)}
其中, $ x_{i} \in \mathcal{X}=\mathbf{R}^{n}, y_{i} \in \mathcal{Y}={+1,-1}, i=1,2, \cdots, N $, 求得感知机模型, 即求得模型参数 w, b 。感知机预测, 通过学习得到的感知机模型, 对于新的输入实例给出其对应的输出类别。
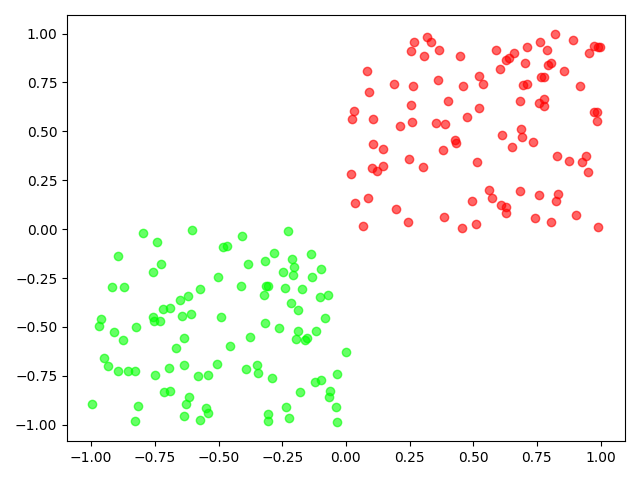
2.4 可分和不可分数据集
对比线性可分和线性不可分的数据集:
严格定义:
定义 2.2 (数据集的线性可分性) 给定一个数据集
T = { ( x 1 , y 1 ) , ( x 2 , y 2 ) , ⋯ , ( x N , y N ) } T=\left\{\left(x_{1}, y_{1}\right),\left(x_{2}, y_{2}\right), \cdots,\left(x_{N}, y_{N}\right)\right\} T={ (x1,y1),(x2,y2),⋯,(xN,yN)}
其中, $ x_{i} \in \mathcal{X}=\mathbf{R}^{n}, y_{i} \in \mathcal{Y}={+1,-1}, i=1,2, \cdots, N $, 如果存在某个超平面 S
w ⋅ x + b = 0 w \cdot x+b=0 w⋅x+b=0
能将数据集的正实例点和负实例点完全正确地划分到超平面的两侧, 即对所有 $ y_{i}=+1$ 的实例 i , 有 $w \cdot x_{i}+b>0 $, 对所有 $ y_{i}=-1 $ 的实例 i , 有 $ w \cdot x_{i}+b<0 $, 则称数据集 T 为线性可分数据集 (linearly separable data set),否则,称数据集 T 线性不可分。
2.5 感知机的学习策略(Learning policy)
函数间隔与几何间隔
空间中任意一个点 $x_{0} $ 到超平面$ \mathrm{S}$ 的距离:
2.5.1 函数间距
∣ w ⋅ x 0 + b ∣ \left|w \cdot x_{0}+b\right| ∣w⋅x0+b∣
函数间距并不常使用,因为等比例的扩大或者缩小w和b将使得超平面不变的情况下其距离可以调整,并不能很好地用于比较。
2.5.2 几何间距
1 ∥ w ∥ ∣ w ⋅ x 0 + b ∣ \frac{1}{\|w\|}\left|w \cdot x_{0}+b\right| ∥w∥1∣w⋅x0+b∣ 其中 ∥ w ∥ 2 \quad\|w\|_{2} ∥w∥2为 w w w的 L 2 范数 L_2范数 L2范数$ \quad|w|{2}=\sqrt{\sum{i=1}^{N} w_{i}^{2}}$
而在几何间距中可以很好地解决这个问题:等比例地扩缩w和b,通过L2范数地变化可以抵消。因此几何间距常用。
2.5.3 感知机的学习算法——原始形式
对于误分类数据而言,
− y i ( w ⋅ x i + b ) > 0 -y_{i}\left(w \cdot x_{i}+b\right)>0 −yi(w⋅xi+b)>0
误分类点 $ x_{i} $ 到超平面 $\mathrm{S} $ 的距离为:(绝对值可以去掉)
− 1 ∥ w ∥ y i ( w ⋅ x i + b ) -\frac{1}{\|w\|} y_{i}\left(w \cdot x_{i}+b\right) −∥w∥1yi(w⋅xi+b)
因此,所有误分类点(集合M)到超平面 S 的总距离为:
− 1 ∥ w ∥ ∑ x i ∈ M y i ( w ⋅ x i + b ) -\frac{1}{\|w\|} \sum_{x_{i} \in M} y_{i}\left(w \cdot x_{i}+b\right) −∥w∥1∑xi∈Myi(w⋅xi+b)
损失函数
L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) L(w, b)=-\sum_{x_{i} \in M} y_{i}\left(w \cdot x_{i}+b\right) L(w,b)=−∑xi∈Myi(w⋅xi+b)
2.5.4 原始形式算法过程
1.任选取超平面 $ w_{0}, b_{0}$ (做一个初始化)
2.采用梯度下降法极小化目标函数
L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) ∇ w L ( w , b ) = − ∑ x i ∈ M y i x i ∇ b L ( w , b ) = − ∑ x i ∈ M y i \begin{array}{l} L(w, b)=-\sum_{x_{i} \in M} y_{i}\left(w \cdot x_{i}+b\right) \\ \nabla_{w} L(w, b)=-\sum_{x_{i} \in M} y_{i} x_{i} \\ \nabla_{b} L(w, b)=-\sum_{x_{i} \in M} y_{i} \end{array} L(w,b)=−∑xi∈Myi(w⋅xi+b)∇wL(w,b)=−∑xi∈Myixi∇bL(w,b)=−∑xi∈Myi
这里采用了函数间隔,因为感知机是误分类驱动,最终的目标是没有一个分错的样本(线性可分数据集),因此最后理想为0,这时放缩参数不影响。当然也可以用几何间隔。
3.更新 w, b
由 x 2 = x 1 − f ′ ( x 1 ) η x_2=x_1 - f'(x_1)\eta x2=x1−f′(x1)η,可知
w ← w + η y i x i b ← b + η y i \begin{array}{l} w \leftarrow w+\eta y_{i} x_{i} \\ b \leftarrow b+\eta y_{i} \end{array} w←w+ηyixib←b+ηyi
注意,上面是对单点更新,每一个点走一步更新一次。若换成以下形式,则是对所有误分类的样本更新一次。
w ← w + ∑ x i ∈ M y i x i b ← b + ∑ x i ∈ M y i \begin{array}{l} w \leftarrow w+\sum_{x_{i} \in M} y_{i} x_{i} \\ b \leftarrow b +\sum_{x_{i} \in M} y_{i} \end{array} w←w+∑xi∈Myixib←b+∑xi∈Myi
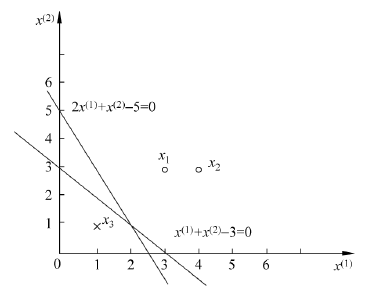
2.5.5 例题
例 2.1 如图所示的训练数据集, 其正实例点是 $ x_{1}=(3,3)^{\mathrm{T}}, x_{2}=(4,3)^{\mathrm{T}} $, 负实例点是 $ x_{3}=(1,1)^{\mathrm{T}}$ , 试用感知机学习算法的原始形式求感知机模型 $f(x)= \operatorname{sign}(w \cdot x+b) $ 。这里, $w=\left(w^{(1)}, w{(2)}\right){\mathrm{T}}, x=\left(x^{(1)}, x{(2)}\right){\mathrm{T}} $。
1.构建损失函数
min L ( w , b ) = − ∑ x i ∈ M y i ( w ⋅ x i + b ) \min L(w, b)=-\sum_{x_{i} \in M} y_{i}\left(w \cdot x_{i}+b\right) minL(w,b)=−∑xi∈Myi(w⋅xi+b)
2.梯度下降求解 w, b 。设步长为 1
取初值 $w_{0}=0, b_{0}=0 $
对于 $ x_{1}, y_{1}\left(w_{0} \cdot x_{1}+b_{0}\right)=0$ 末被正确分类,更新 w, b 。
w 1 = w 0 + x 1 y 1 = ( 3 , 3 ) T , b 1 = b 0 + y 1 = 1 * w 1 ⋅ x + b 1 = 3 x ( 1 ) + 3 x ( 2 ) + 1 w_{1}=w_{0}+x_{1} y_{1}=(3,3)^{T}, b_{1}=b_{0}+y_{1}=1 \Longrightarrow w_{1} \cdot x+b_{1}=3 x^{(1)}+3 x^{(2)}+1 w1=w0+x1y1=(3,3)T,b1=b0+y1=1*w1⋅x+b1=3x(1)+3x(2)+1
对 $x_{1}, x_{2} $ ,显然 $y_{i}\left(w_{1} \cdot x_{i}+b_{1}\right)>0 $ ,被正确分类,不作修改。对于 $ x_{3}, y_{3}\left(w_{1}\right. . \left.x_{3}+b_{1}\right)<0 ,被误分类,更新 ,被误分类,更新 ,被误分类,更新 w , b$。
w 2 = w 1 + x 3 y 3 = ( 2 , 2 ) T , b 2 = b 1 + y 3 = 0 * w 2 ⋅ x + b 2 = 2 x ( 1 ) + 2 x ( 2 ) w_{2}=w_{1}+x_{3} y_{3}=(2,2)^{T}, b_{2}=b_{1}+y_{3}=0 \longrightarrow w_{2} \cdot x+b_{2}=2 x^{(1)}+2 x^{(2)} w2=w1+x3y3=(2,2)T,b2=b1+y3=0*w2⋅x+b2=2x(1)+2x(2)
以此往复,直到没有误分类点,损失函数达到极小。

这是在计算中误分类点先后取 $ x_{1}, x_{3}, x_{3}, x_{3}, x_{1}, x_{3}, x_{3} $ 得到的分离超平面和感知机模型。如果在计算中误分类点依次取 $x_{1}, x_{3}, x_{3}, x_{3}, x_{2}, x_{3}, x_{3}, x_{3}, x_{1}, x_{3}, x_{3} $ 那么得到的分离超平面是 $ 2 x{(1)}+x{(2)}-5=0 $ 。
感知机学习算法由于采用不同的初值或选取不同的误分类点, 解可以不同。
边栏推荐
猜你喜欢

![Detailed explanation of calculation commands in shell (expr, (()), $[], let, bc )](/img/3c/5cc4d16b9b525997761445f32802d5.png)


随机推荐
谈谈对Volatile的理解
(Note) AXIS ACASIS DT-3608 Dual-bay Hard Disk Array Box RAID Setting
Jenkins--基础--5.4--系统配置--全局工具配置
day_05 time 模块
Have you ever learned about these architecture designs and architecture knowledge systems?(Architecture book recommendation)
ABAP 和json转换的方法
Scala类型转换
day_05_pickel 和 json
“蔚来杯“2022牛客暑期多校训练营4
打印lua内部结构的函数调用
How to use postman
The use of thread pool and analysis of ThreadPoolExecutor source code
向量组的线性相关性
spark:热门品类中每个品类活跃的SessionID统计TOP10(案例)
理解JS的三座大山
数据库mysql
[Concurrent programming] - Thread pool uses DiscardOldestPolicy strategy, DiscardPolicy strategy
spark:商品热门品类TOP10统计(案例)
小程序云开发(十):渐变与动画
膜拜,Alibaba分布式系统开发与核心原理解析手册