当前位置:网站首页>Detailed analysis of trajectory generation tool in psins toolbox
Detailed analysis of trajectory generation tool in psins toolbox
2022-07-27 04:04:00 【Eighteen with her】
PSINS Analysis of the track generation tool in the toolbox
Set track segment
seg = trjsegment(xxx, 'init', 0);% Represents the initialization of the track structure array
The initialization statement is as follows :
case 'init' % trjsegment(***, 'init', initvelocity)
initvelocity = lasting;
seg = [];
seg.vel = initvelocity; seg.wat = [];
seg = trjsegment(seg, 'uniform', 100);% It means to keep the previous state 100s
At this time, the update statement is :
case 'uniform', % trjsegment(seg, 'uniform', lasting)
seg.wat = [seg.wat; [lasting, seg.vel, 0, 0, 0, 0, 0, 0]];
here seg.wat The array looks like this :
100 0 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
0 0 0 0 0 0 0.597706293396019 1.90083222404074 380 100
seg = trjsegment(seg, 'accelerate', 10, xxx, 1);% To express with 1m/s2 Speed up 10s
At this time, the update statement is :
case 'accelerate',
seg.wat = [seg.wat; [lasting, seg.vel, 0, 0, 0, 0, a, 0]];
seg.vel = seg.vel + lasting*a;
here seg.wat The array looks like this :
10 0 0 0 0 0 1 0
The trajectory generated at this time avp The message is :
0 0 0 0 10 0 0.597714159954192 1.90083222404074 380 110
You can see , Used 10s Time accelerates to 10m/s 了
seg = trjsegment(seg, 'uniform', 100);% It means to keep the state of the last moment 100s
here seg.wat The array looks like this :
100 10 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
0 0 0 0 10.0000000000000 0 0.597871490996066 1.90083222404074 380 210
You can see , The speed has been kept at 10m/s
seg = trjsegment(seg, 'coturnleft', 45, 2, xxx, 4);% Indicates coordinated left turn , First turn left in the rolling direction 4s, Then turn to the whole 45s, Finally, turn right in the rolling direction 4s. Considering heading and rolling
At this time, the update statement is :
case 'coturnleft', % coordinate turn left
rolllasting = var1; rollw = atan(cf/9.8)/dps/rolllasting;
seg = trjsegment(seg, 'rollleft', rolllasting, rollw);
seg = trjsegment(seg, 'turnleft', lasting, w);
seg = trjsegment(seg, 'rollright', rolllasting, rollw);
here seg.wat The array looks like this :
4 10 0 -0.00890097809914488 0 0 0 0
45 10 0 0 0.0349065850398866 -0.349065850398866 0 0
4 10 0 0.00890097809914488 0 0 0 0
The trajectory generated at this time avp The message is :
0 -2.81892564846231e-18 1.57079632679490 -10.0174431386039 0.0174634464359821 0 0.597922945846830 1.90077029464407 380 263
seg = trjsegment(seg, 'uniform', 100);% It means to keep the previous state 100s
here seg.wat The array looks like this :
100 10 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
0 0.158933466905843 1.57079632679490 -10.0000000000000 -1.93716910436791e-14 0 0.597922947787353 1.90057322881847 380 367
seg = trjsegment(seg, 'coturnright', 10*5, 9, xxx, 4);% Indicates coordinated right turn , First turn right in the rolling direction 4s, Then turn to the whole 50s, Finally, turn left in the rolling direction 4s. Considering heading and rolling
At this time, the update statement is :
case 'coturnright', % coordinate turn right
rolllasting = var1; rollw = atan(cf/9.8)/dps/rolllasting;
seg = trjsegment(seg, 'rollright', rolllasting, rollw);
seg = trjsegment(seg, 'turnright', lasting, w);
seg = trjsegment(seg, 'rollleft', rolllasting, rollw);
here seg.wat The array looks like this :
4 10 0 0.0397333667264608 0 0 0 0
50 10 0 0 -0.157079632679490 1.57079632679490 0 0
4 10 0 -0.0397333667264608 0 0 0 0
The trajectory generated at this time avp The message is :
0 -6.93889390390723e-18 3.31075308887341e-14 -0.000108245811050810 10.0001076805146 0 0.597950893012223 1.90056096813122 380 428
seg = trjsegment(seg, 'uniform', 100);% It means to keep the previous state 100s
here seg.wat The array looks like this :
100 10 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
0 -6.93889390390723e-18 3.31075308887341e-14 -3.31075308887341e-13 10.0000000000000 0 0.598097210572095 1.90056096812188 380 521
seg = trjsegment(seg, 'climb', 10, 2, xxx, 50);% It means climbing up 10s, Down again 10s
At this time, the update statement is :
case 'climb',
uniformlasting = var1;
seg = trjsegment(seg, 'headup', lasting, w);
seg = trjsegment(seg, 'uniform', uniformlasting);
seg = trjsegment(seg, 'headdown', lasting, w);
here seg.wat The array looks like this :
10 10 0.0349065850398866 0 0 0 0 0.349065850398866
50 10 0 0 0 0 0 0
10 10 -0.0349065850398866 0 0 0 0 -0.349065850398866
The trajectory generated at this time avp The message is :
-9.54097911787244e-18 -6.93889390390723e-18 3.31075308887341e-14 -3.31077703057269e-13 10.0000723149647 1.27944630294799e-05 0.598205117738701 1.90056096812188 585.575096913505 593
seg = trjsegment(seg, 'uniform', 100);% It means to keep the state of the last moment 100s
here seg.wat The array looks like this :
100 10 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
-9.54097911787244e-18 -6.93889390390723e-18 3.31075308887341e-14 -3.31075308887341e-13 10.0000000000000 -9.54097911787244e-17 0.598359296471714 1.90056096812188 585.575102735199 691
seg = trjsegment(seg, 'climb', 10, 2, xxx, 50);% It means downhill 10s, Up again 10s
At this time, the update statement is :
case 'climb',
uniformlasting = var1;
seg = trjsegment(seg, 'headup', lasting, w);
seg = trjsegment(seg, 'uniform', uniformlasting);
seg = trjsegment(seg, 'headdown', lasting, w);
here seg.wat The array looks like this :
10 10 -0.0349065850398866 0 0 0 0 -0.349065850398866
50 10 0 0 0 0 0 0
10 10 0.0349065850398866 0 0 0 0 0.349065850398866
The trajectory generated at this time avp The message is :
9.54097911787244e-18 -6.93889390390723e-18 3.31075308887341e-14 -3.31272919967326e-13 10.0059687652531 -0.00105603517436349 0.598464056442422 1.90056096812188 380.000480513597 761
seg = trjsegment(seg, 'uniform', 100);% It means to keep the state of the last moment 100s
here seg.wat The array looks like this :
100 10 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
9.54097911787244e-18 -6.93889390390723e-18 3.31075308887341e-14 -3.31075308887341e-13 10.0000000000000 9.54097911787244e-17 0.598621386806681 1.90056096812188 379.999999999992 861
seg = trjsegment(seg, 'deaccelerate', 5, xxx, 2);% Indicates deceleration 5s
At this time, the update statement is :
case 'deaccelerate',
seg.wat = [seg.wat; [lasting, seg.vel, 0, 0, 0, 0,-a, 0]]; % a>0
seg.vel = seg.vel - lasting*a;
here seg.wat The array looks like this :
5 10 0 0 0 0 -2 0
The trajectory generated at this time avp The message is :
9.54097911787244e-18 -6.93889390390723e-18 3.31075308887341e-14 8.04638123325432e-29 5.60662627435704e-15 -1.04770588974666e-31 0.598625320052132 1.90056096812188 379.999999999992 866
seg = trjsegment(seg, 'uniform', 100);% It means to keep the state of the last moment 100s
here seg.wat The array looks like this :
100 0 0 0 0 0 0 0
The trajectory generated at this time avp The message is :
9.54097911787244e-18 -6.93889390390723e-18 3.31075308887341e-14 1.18245492979398e-124 8.23921050400522e-111 -1.53965485650258e-127 0.598625320052132 1.90056096812188 379.999999999992 966
Final trajectory plan

Generate your own trajectory
Understand the meaning of the above code , You can complete the generation of any trajectory , For example, generate the following trajectory :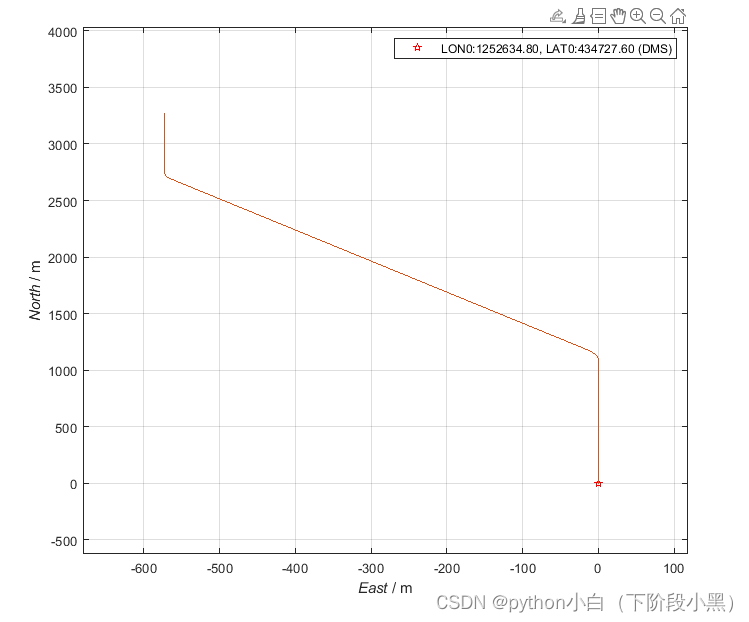
The code is as follows :
glv.pos0=[43.791*glv.deg;125.443*glv.deg;268.3];
ts = 0.1; % sampling interval
avp0 = [[0;0;0]; [0;0;0]; glv.pos0]; % init avp
% trajectory segment setting
xxx = [];
seg = trjsegment(xxx, 'init', 0);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'accelerate', 10, xxx, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 10, 2, xxx, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, xxx, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnright', 10, 2, xxx, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, xxx, 1);
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);
trjfile('mytrj0100ms.mat', trj);
insplot(trj.avp);
imuplot(trj.imu);
边栏推荐
猜你喜欢

Six determination methods of Worthington peroxidase activity
Message queue learning -- Concepts

Okaleido tiger is about to log in to binance NFT in the second round, which has aroused heated discussion in the community

Characteristics and experimental suggestions of abbkine abfluor 488 cell apoptosis detection kit

VR全景现在是不是刚需?看完你就明白了
次轮Okaleido Tiger即将登录Binance NFT,引发社区热议

线上一个隐匿 Bug 的复盘

Chapter 4 决策树和随机森林

Is Jiufang intelligent investment a regular company? Talk about Jiufang intelligent investment

Chapter 5 decision tree and random forest practice
随机推荐
Smart pointer shared_ ptr、unique_ ptr、weak_ ptr
一维数组的应用
Leetcode- > 2-point search and clock in (3)
STM32CubeMX学习笔记(41)——ETH接口+LwIP协议栈使用(DHCP)
NFT数字藏品系统开发:小蚁数智帮助品牌一键上链发行NFT
03. Get the web page source code
Will this flinkcdc monitor all tables in the database? Or the designated table? I look at the background log. It monitors all tables. If it monitors
Detailed tutorial of typera
Ming min investment Qiu Huiming: behind the long-term excellence and excess, the test is the team's investment and research ability and the integrity of strategy
The problem that prevented the installation of umi4 for one day has been solved
VR全景人淘金“小心机”(上)
注释有点好玩哦
LeetCode 第二十八天
PSINS工具箱中轨迹生成工具详细解析
Plato farm brings a new experience to community users through the LAAS protocol elephant swap
Program to change the priority of the process in LabVIEW
Golang jwt跨域鉴权
商业打假系列之第一百之--无聊的制度和管理流程真的可以扔进垃圾桶-顺便分析十几个无用的Unity游戏自检项目
手动从0搭建ABP框架-ABP官方完整解决方案和手动搭建简化解决方案实践
Bean Validation原理篇--07