当前位置:网站首页>ROS人机交互软件
ROS人机交互软件
2022-08-02 15:06:00 【华为云】
前言
在使用ROS的过程中,我们常常需要使用复杂的编译源代码和相关的解析操作,才能单独对某一个任务进行启动。在修改时,也需要单独打开某个文件、编辑、保存,这个过程比较繁琐。这些数据信息均需要在终端中以字符的方式显示出来,键入命令同样需要在终端中输入字符命令,如果是用于较大的ROS工程,总不能所有调试工作,每改动一下参数都键入字符命令吧。为此人机交互界面氤氲而生,使用按钮,输入框等控件简化这一过程,并且使调试过程更加清晰明确,下方是一个人机交互界面的结构图:

![]()
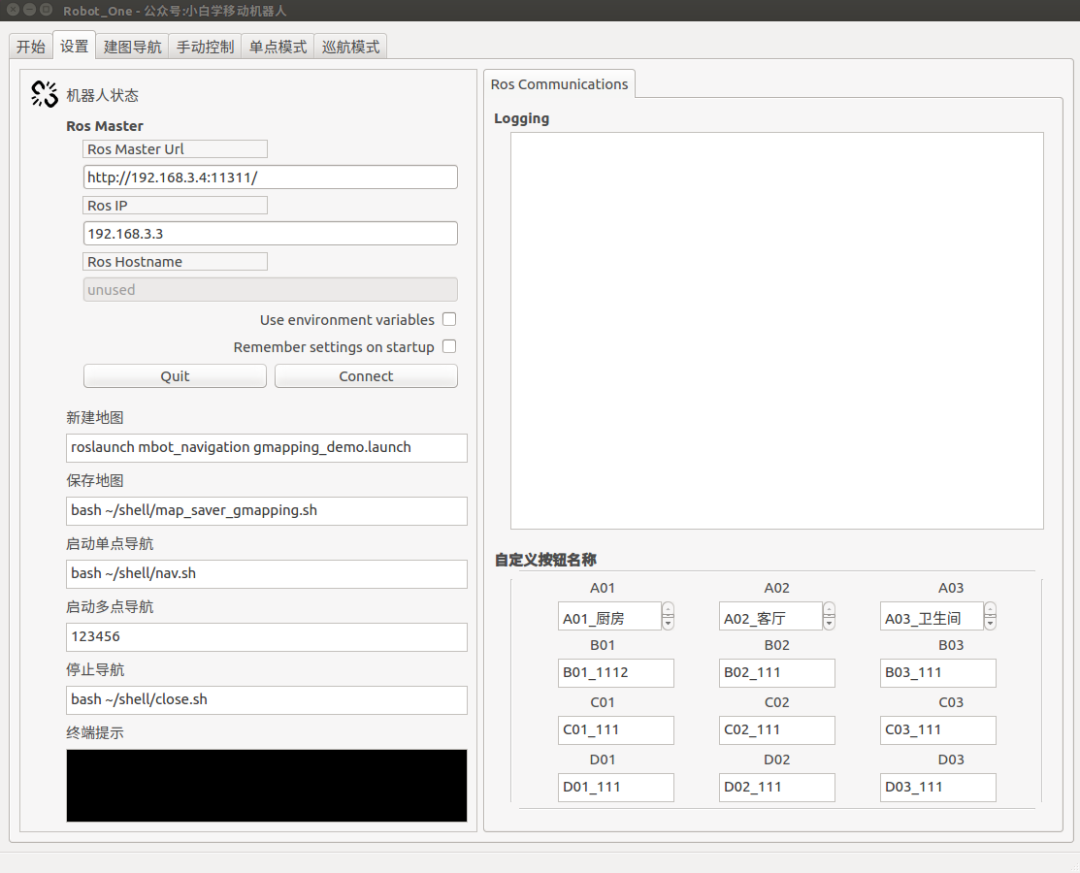
整个软件被分为6个界面,主要部分为设置界面、建图导航界面、键盘控制界面、单点导航界面、巡航模式界面这六个界面。其中建图导航包含rviz组件,具备显示功能。整个软件还具备保存设置功能,只需第一次开机设置。下面我们对该界面以及运行流程进行详细介绍,并给出一系列较为实用的人机交互软件。
界面介绍
设置页面
设置界面,主要包括连接ros master,通过输入主机IP和从机IP来对机器人进行连接、设置启动功能按钮命令、自定义单点导航按钮名称、显示调试信息等模块。具体如下图所示:
![]()
.........详情请参考
边栏推荐
猜你喜欢


随机推荐
leetcode 504. Base 7 七进制数 (简单)
程序员开发效率神器汇总!
Based on mobileNet dog breed classification (migration)
Sql文件导入数据库-保姆级教程
OneFlow源码解析:Op、Kernel与解释器
mysql 自动添加创建时间、更新时间
mysql 索引使用与优化
PAT Class A 1130 Infix Expressions
第十五天笔记
Linux系统中mysql数据库的基本管理
WWW'22 推荐系统论文之序列推荐篇
Go-4-在vim中无法跳转到源代码
Qt | 关于对象树和元对象的相关问题
c语言实现排雷
QT | VS2017 + Qt5.14.2 环境搭建
MySQL 自增主键
Qt | 关于 Qt Creator 打开项目编译不过的问题
“绿色低碳+数字孪生“双轮驱动,解码油气管道站升级难点 | 图扑软件
类的比较大小(Comparable -> compareTo(类自己实现接口),Comparator -> compare(新建一个类作为比较器))
Selenium元素定位方法总结