当前位置:网站首页>2 用D435i运行VINS-fusion
2 用D435i运行VINS-fusion
2022-08-05 00:01:00 【小啊白菜】
环境:Ubuntu20.04 + ROS-Noetic
1 VINS-fusion的安装
1.1 环境和依赖的安装
编译VINS需要ROS,Ceres和Eigen,Ceres需要依赖Eigen,所以先安Eigen才能安装Ceres,但是由于安装ROS-noetic也自动通过apt安装了Eigen3.3.7版(这个版本还行,如果想安装其他版本可以通过源码方式安装),所以安装完ROS可以直接安装Ceres,Ceres安装1.14版即可,安装最新2.x版本会报错。
- 安装ros-noetic
可以搜索鱼香ROS一键安装,很方便。
- 安装Ceres1.14
开头说了Ceres的依赖Eigen已经在安装ros时通过apt安装了,但是我是通过源码安装了Eigen,因为上过SLAM十四讲的都会把一堆第三方库通过源码安装,能更好滴管理库的版本,用apt安装的大都是很新的版本,但是新的不一定稳定,可能会报一堆错,所以会选择源码的方式安装稳定版本的第三方库,那既然说到这了,就写一下用源码安装Eigen的过程,做不做这步你们随意。
安装Eigen3.3.9:
进入官网下载界面下载Eigen3.3.9的Source code(zip),并解压,可以保存在一个文件夹里便于查看以及误删后的再次安装。
安装命令:
1 右键点击文件夹,选在终端打开
mkdir build && cd build
2 在build路径下输入
cmake ..
3 安装
sudo make install
简简单单就安装成功了,由于Eigen是由纯头文件组成的库,所以可以在/usr/local/include/eigen3/目录下看到。
由于有多个版本(多版本管理请自行查找),可以用命令行查看当前使用的Eigen版本,pkg-config --modversion eigen3,结果如下,
安装Ceres1.14:
进入官网下载界面下载Ceres1.14的源码并解压,如果不能进入github可以上gittee上搜一搜。
首先需要安装一些依赖:
# google-glog + gflags
sudo apt install libgoogle-glog-dev libgflags-dev
# Use ATLAS for BLAS & LAPACK
sudo apt install libatlas-base-dev
# SuiteSparse and CXSparse (optional)
sudo apt install libsuitesparse-dev
安装命令:
1 右键点击文件夹,选在终端打开
mkdir build && cd build
2 在build路径下输入
cmake ..
3 编译一下
make -j4
4 测试
make test
5 安装
sudo make install
至此Ceres也安装完成了,VINS-fusion的环境准备工作结束了。
1.2 编译VINS-Fusion
首先创建一个ros工作空间,可以和上篇文章Ubuntu20.04安装D435i相机驱动中的realsense-ros工作空间catkin_ws放在一起,这样后面用相机运行VINS就不用source两遍了。
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ..
catkin_make
此时就会报一堆由OpenCV版本引起的错误。
1.3 编译错误解决方法
由于ROS-noetic安装时自动安装了OpenCV4.2,而VINS运行需要的是OpenCV3,主要在文件夹camera_model中两个文件添加缺失的头文件即可。
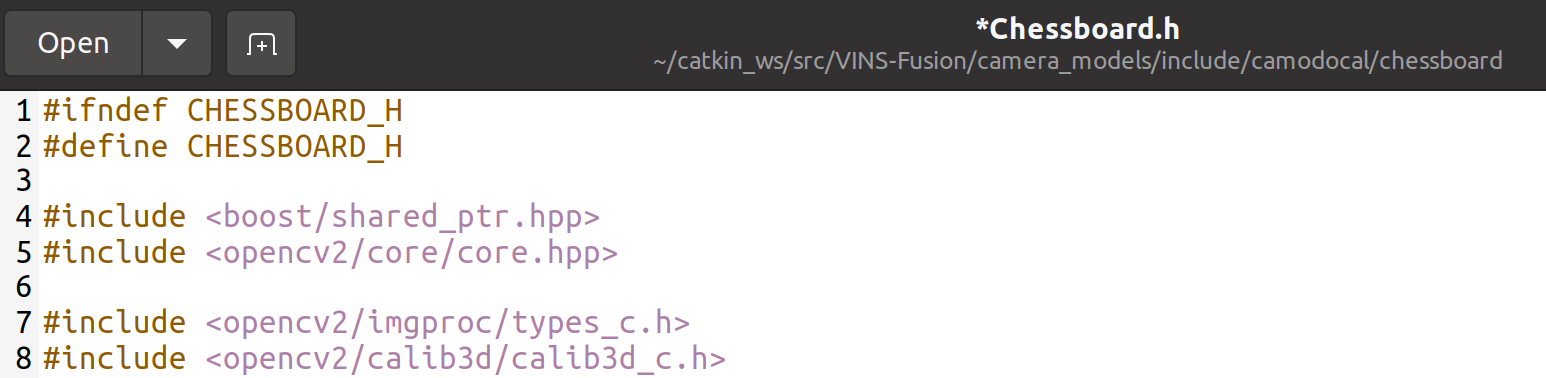
在下图两个文件中分别添加78两行头文件,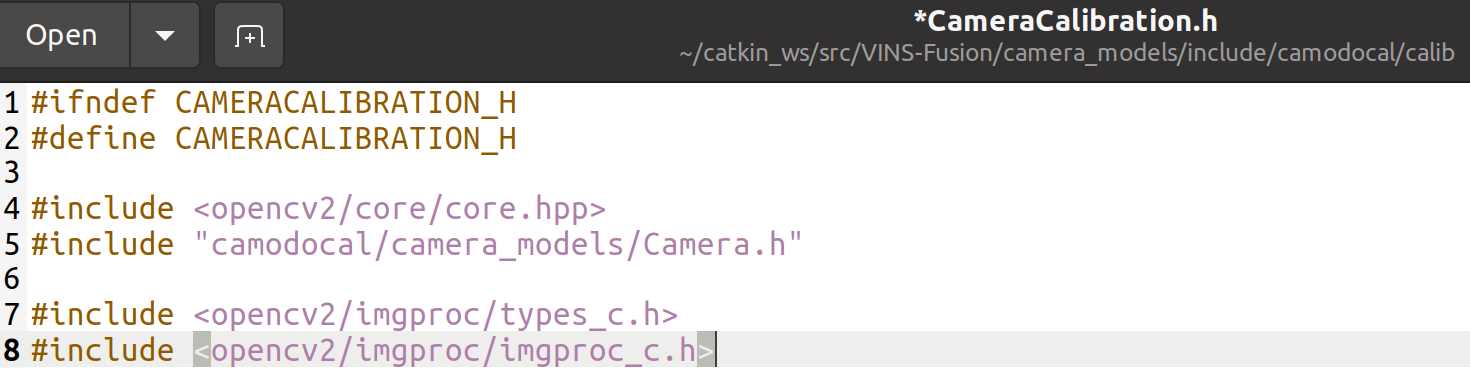
 代码如下,可直接复制
代码如下,可直接复制
#include <opencv2/imgproc/types_c.h>
#include <opencv2/imgproc/imgproc_c.h>
#include <opencv2/imgproc/types_c.h>
#include <opencv2/calib3d/calib3d_c.h>
接下来还会遇到几个not declared的错误,按下面方法对报错文件逐一进行修改即可。
- error: ‘CV_FONT_HERSHEY_SIMPLEX’was not declared in this scope
将所有报这个错的文件中CV_FONT_HERSHEY_SIMPLEX 参数改为 cv::FONT_HERSHEY_SIMPLEX
- error: ‘CV_LOAD_IMAGE_GRAYSCALE’ was not declared in this scope
将所有报这个错的文件中CV_LOAD_IMAGE_GRAYSCALE 参数改为 cv::IMREAD_GRAYSCALE
- error: ‘CV_RGB2GRAY’ was not declared in this scope
将所有报这个错的文件中添加#include <opencv2/imgproc/types_c.h>
都修改完成之后就可以编译成功了。
2 VINS-Fusion跑数据集
以EuRoC数据集为例,这个数据集是ETH大学用无人机录制的,数据集可去官网下载(如果你现在还不能科学上网,你应该知道科学上网的重要性了),下载MH_01_easy.bag文件就行。
输入下列命令运行双目+IMU:
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag
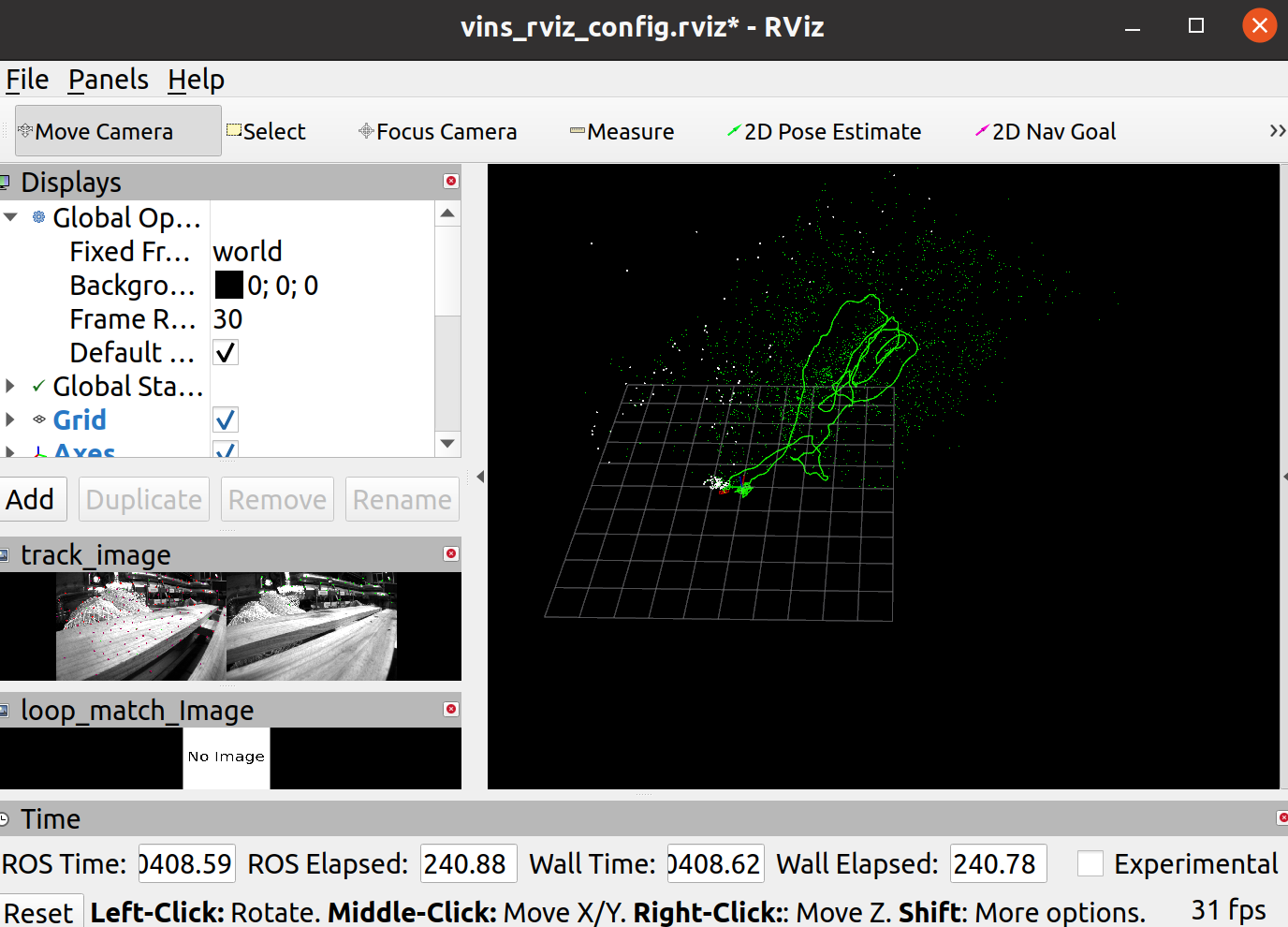
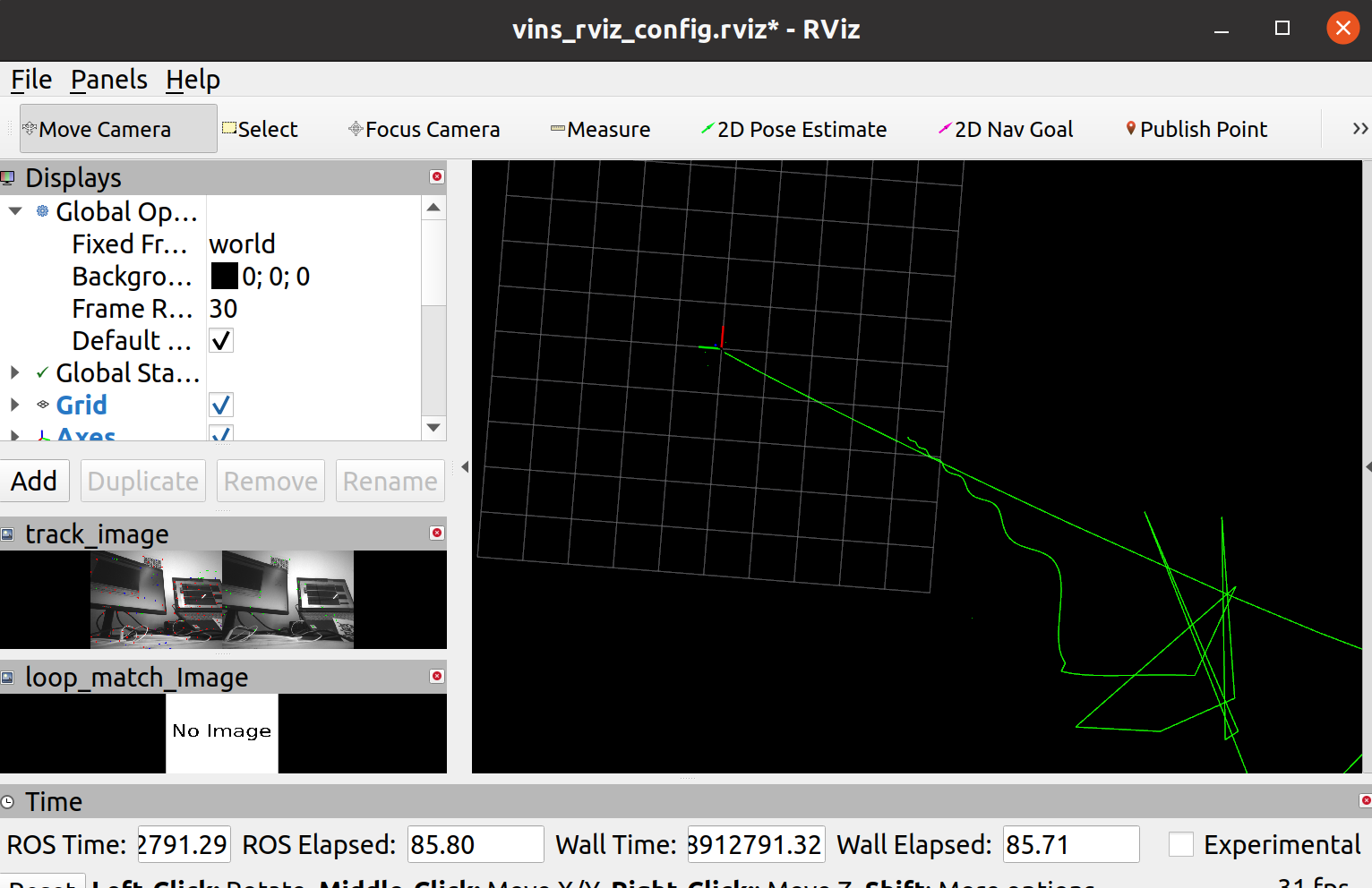
不带回环检测的命令及结果如下所示,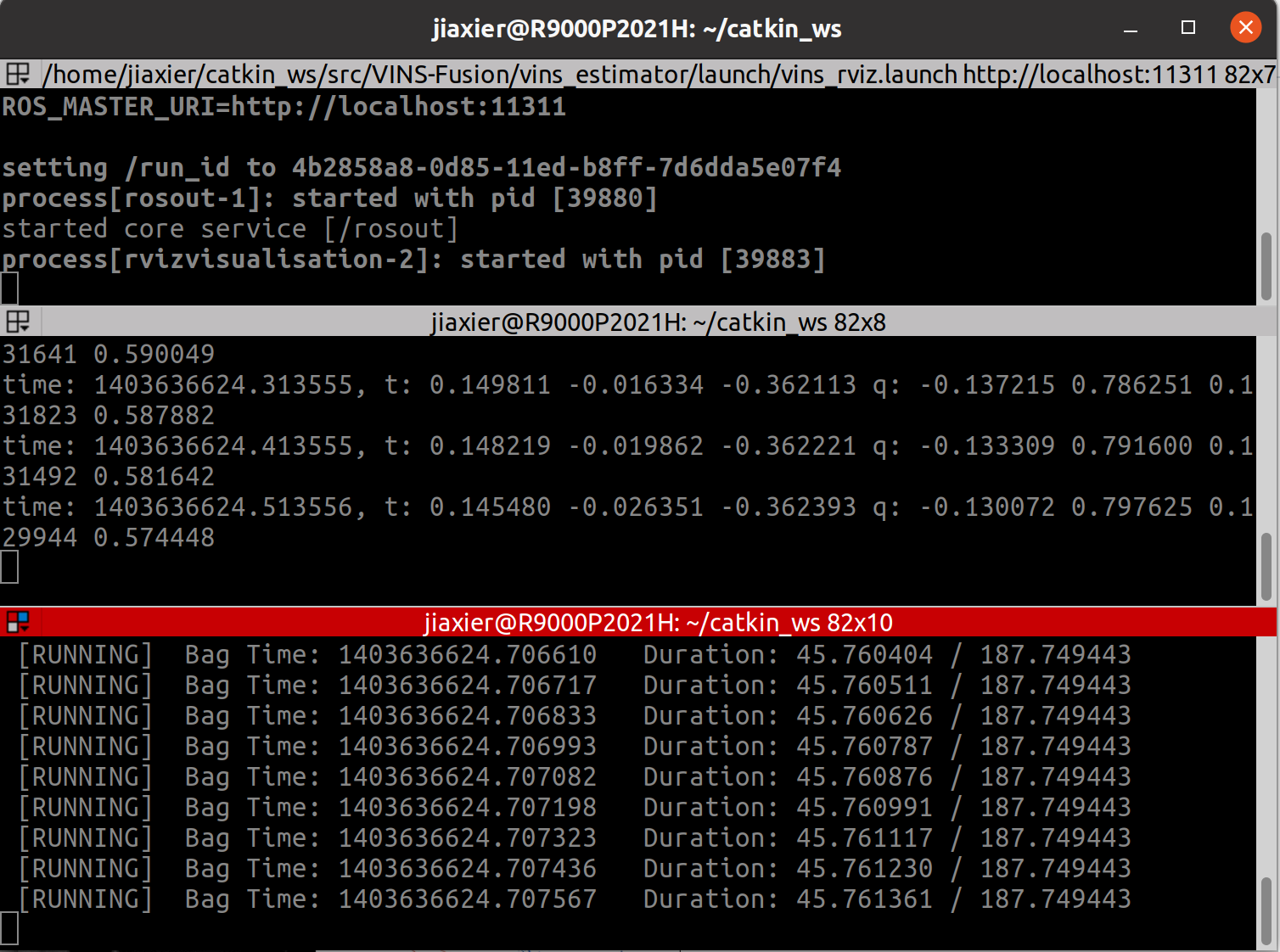
 下面就可以用相机运行VINS-Fusion了,和跑数据集唯一的不同就是用相机的发布到话题的数据代替了ros bag记录的数据的播放。
下面就可以用相机运行VINS-Fusion了,和跑数据集唯一的不同就是用相机的发布到话题的数据代替了ros bag记录的数据的播放。
3 用相机运行VINS-Fusion
修改文件realsense-ros中的rs_camera.launch文件,可以复制一个命名为rs_camera_vins.launch能保留原文件。直接复制下面代码就行,
<launch>
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="fisheye_width" default="640"/>
<arg name="fisheye_height" default="480"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="enable_depth" default="true"/>
<arg name="infra_width" default="640"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="color_width" default="640"/>
<arg name="color_height" default="480"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="30"/>
<arg name="depth_fps" default="30"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="30"/>
<arg name="gyro_fps" default="200"/>
<arg name="accel_fps" default="250"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="enable_sync" default="true"/>
<arg name="align_depth" default="true"/>
<arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/>
<arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/>
<arg name="allow_no_texture_points" default="false"/>
<arg name="emitter_enable" default="false"/>
<!-- rosparam set /camera/stereo_module/emitter_enabled false -->
<rosparam>
/camera/stereo_module/emitter_enabled: 0
</rosparam>
<rosparam if="$(arg emitter_enable)">
/camera/stereo_module/emitter_enabled: 1
</rosparam>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
</include>
</group>
</launch>
主要改变就是把角速度和加速度话题合并成IMU话题,这样vins能接收到,还有一些改变可查看realsense-ros的readme查看具体意思。
接下来可以运行了,输入下列命令,
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml
roslaunch realsense2_camera rs_camera_vins.launch
 这三条命令需要特别注意第二条命令,我们可以看到yaml存在的路径很长,所以自然想到可以先进入到~/catkin_ws/src/VINS-Fusion/config/realsense_d435i目录下运行
这三条命令需要特别注意第二条命令,我们可以看到yaml存在的路径很长,所以自然想到可以先进入到~/catkin_ws/src/VINS-Fusion/config/realsense_d435i目录下运行rosrun vins vins_node realsense_stereo_imu_config.yaml,但是这会报一个惊天大错,Assertion “!px=0” failed,如下图所示, 这是一个智能指针错误,我一直以为和库的环境有关系,主要是被issue里一个大哥误导了,他说他重新安装了一个稳定的Eigen和Ceres就好了,但是我换了好几次有时候好使有时候不好使,卡了我两三天最后终于找到了这篇博客,大家可以点进去看看,在parameter.cpp中它规定的路径格式就是得带一个"/",所以前边至少带一个上级目录,这样就不会报错了,当然像这篇博客中把configpath和/删掉之后就可以直接运行
这是一个智能指针错误,我一直以为和库的环境有关系,主要是被issue里一个大哥误导了,他说他重新安装了一个稳定的Eigen和Ceres就好了,但是我换了好几次有时候好使有时候不好使,卡了我两三天最后终于找到了这篇博客,大家可以点进去看看,在parameter.cpp中它规定的路径格式就是得带一个"/",所以前边至少带一个上级目录,这样就不会报错了,当然像这篇博客中把configpath和/删掉之后就可以直接运行rosrun vins vins_node realsense_stereo_imu_config.yaml了。
我们可以看到图中定位已经飞了,所以需要对相机进行标定,下篇进入相机标定。
边栏推荐
猜你喜欢
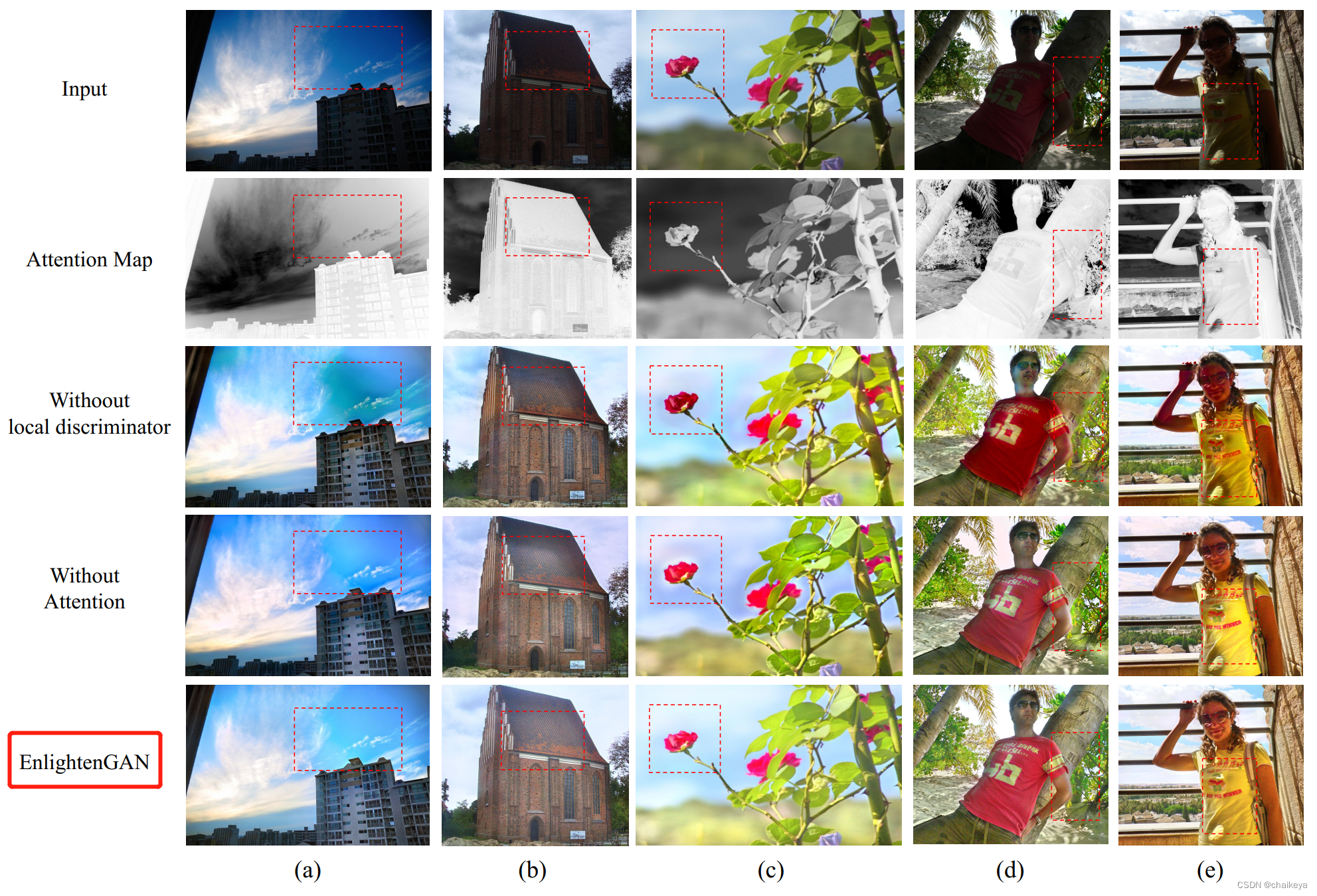
【论文笔记】—低照度图像增强—Unsupervised—EnlightenGAN—2019-TIP
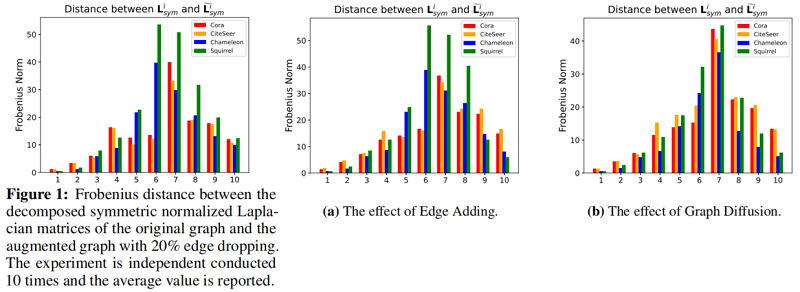
论文解读( AF-GCL)《Augmentation-Free Graph Contrastive Learning with Performance Guarantee》
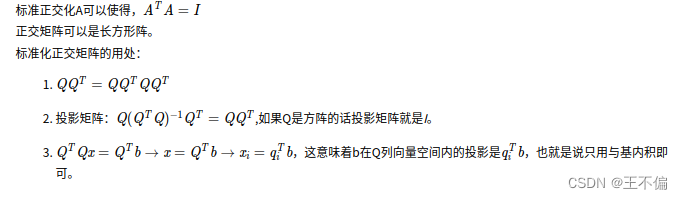
Mathematical Principles of Matrix
一、爬虫基本概念

Getting started with 3D modeling for games, what modeling software can I choose?
![[CVA Valuation Training Camp] Financial Modeling Guide - Lecture 1](/img/8b/360df9a9094037dc358cb21c60cdc8.png)
[CVA Valuation Training Camp] Financial Modeling Guide - Lecture 1
从单体架构迁移到 CQRS 后,我觉得 DDD 并不可怕
【Valentine's Day special effects】--Canvas realizes full screen love
jenkins send mail system configuration

Modelers experience sharing: model study method
随机推荐
~ hand AHB - APB Bridge 】 【 AMBA AHB bus
Three tips for you to successfully get started with 3D modeling
How to burn the KT148A voice chip into the chip through the serial port and the tools on the computer
基于Appian低代码平台开发一个SpaceX网站
头脑风暴:完全背包
线程三连鞭之“线程的状态”
找不到DiscoveryClient类型的Bean
MongoDB权限验证开启与mongoose数据库配置
Handwritten Distributed Configuration Center (1)
论文解读( AF-GCL)《Augmentation-Free Graph Contrastive Learning with Performance Guarantee》
深度|医疗行业勒索病毒防治解决方案
矩阵数学原理
简单的顺序结构程序(C语言)
KT6368A蓝牙的认证问题_FCC和BQB_CE_KC认证或者其它说明
英特尔WiFi 7产品将于2024年亮相 最高速度可达5.8Gbps
Nuclei(二)进阶——深入理解workflows、Matchers和Extractors
2022 Niu Ke Summer Multi-School Training Camp 5 (BCDFGHK)
@Async注解的作用以及如何实现异步监听机制
Huggingface入门篇 II (QA)
.net (C#) get year month day between two dates