当前位置:网站首页>IoU, GIoU, DIoU and CIoU in target detection
IoU, GIoU, DIoU and CIoU in target detection
2022-08-04 07:03:00 【Blood chef】
什么是IOU?
简单来说IOUIt is used to measure the degree of overlap between the predicted frame and the real frame in target detection.在图像分类中,There is a clear indicator准确率To measure the quality of the model classification model.其公式为:
a c c = P t r u e N N = 全 部 样 本 的 数 量 , P t r u e = 预 测 正 确 的 样 本 数 量 acc = \frac{P_{true}}{N} {\quad}{\quad}{\quad}{\quad}{\quad}{\quad}{\quad}N=the total number of samples,P_{true}=预测正确的样本数量 acc=NPtrueN=全部样本的数量,Ptrue=预测正确的样本数量
This formula is obviously not suitable for use in object detection.We know that in target detection, a rectangle is used to frame the detected object,And because the scale of the detected object is different,The predicted box is larger or smaller than the ground-truth box.Therefore, the metric must be scale-invariant,Then the great gods introduced a conceptIOU(交并比),Use the prediction box(A)和真实框(B)The intersection of is divided by the union of the two,其公式为:
I O U = A ∩ B A ∪ B IOU = \frac{A\cap B}{A\cup B} IOU=A∪BA∩B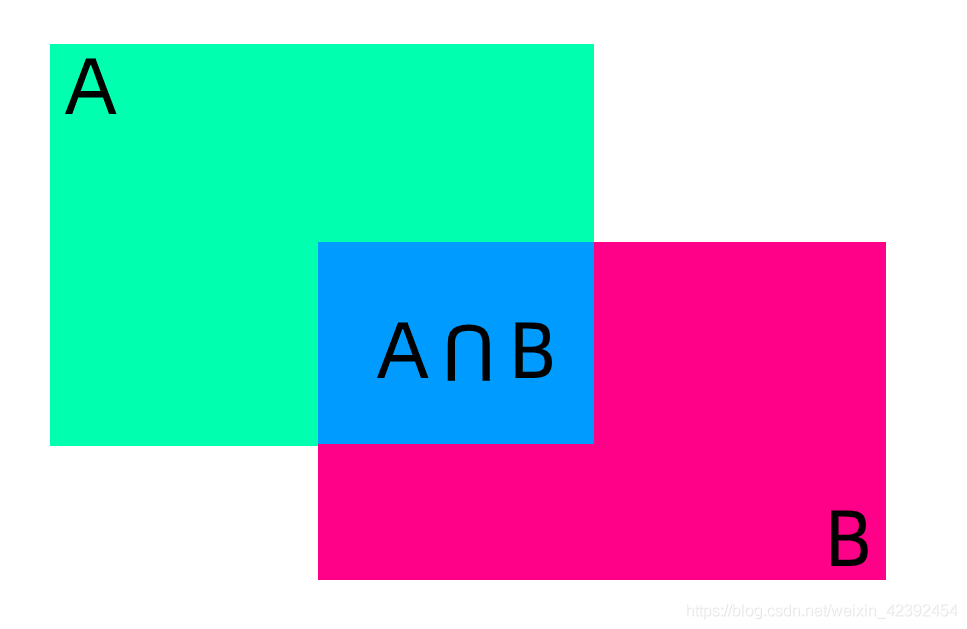
显而易见,IOUThe higher the value also indicatesA框与BThe higher the degree of frame overlap,代表模型预测越准确.反之,IOUThe lower the model, the worse the performance.
IOU应用场景
In addition to being an evaluation metric for object detection,IOU还有其他应用场景:
- 在anchor-basedmethod in target detection,根据IOUvalue to distinguish positive and negative samples.
- It can be directly regressed as a bounding boxloss函数进行优化.
- 在NMS(非极大值抑制)Filter on prediction boxes.
IOU的优缺点
普通IOU的优缺点很明显,优点:
- IOU具有尺度不变性
- 满足非负性
同时,由于IOUThe distance between boxes is not considered,So it workslossFunctions also have corresponding disadvantages:
- 在A框与BWhen the boxes do not overlapIOU为0,The distance between the two cannot be correctly reflected.
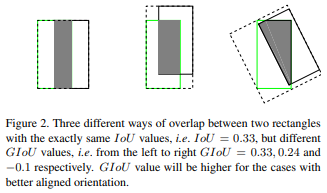
- IoU无法精确的反映两者的重合度大小.如下图所示,三种情况IOU都相等,但看得出来他们的重合度是不一样的,左边的图回归的效果最好,右边的最差.
对IOU进行改进
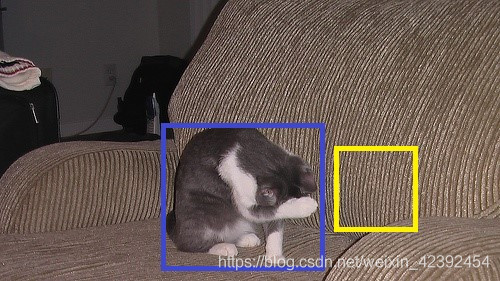
普通IOUis insensitive to the distance between the two boxes,下面两张图中,The coordinates of the predicted box in the left picture are closer to the ground truth than the coordinates of the predicted box in the right picture.但两者的IOU皆为0,如果直接把IOU当作loss函数进行优化,则loss=0,没有梯度回传,So training is not possible.

GIOU
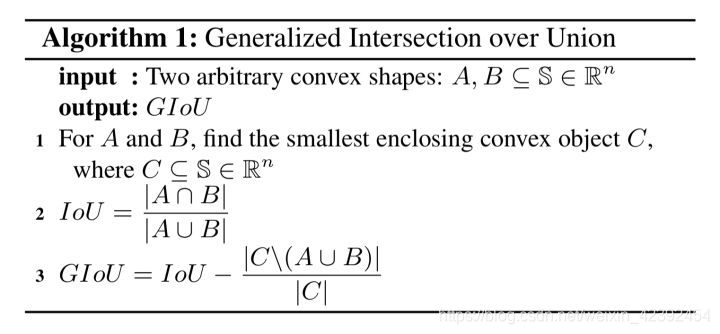
- 对于任意的两个A、B框,首先找到一个能够包住它们的最小方框,例如在上述场景 A 和 B 中,C 的形状分别为:


计算IOU
根据A、B,我们可以算出C的面积,有了Carea can be calculatedGIOU了:
G I O U = I O U − C − ( A ∪ B ) C GIOU = IOU - \frac{C - (A\cup B)}{C} GIOU=IOU−CC−(A∪B)
G I O U = − 1 + ( A ∪ B ) C ( I O U = 0 ) GIOU = -1 + \frac{(A\cup B)}{C} \quad\quad\quad(IOU=0) GIOU=−1+C(A∪B)(IOU=0)
而当IOU为0时,意味着A与Bvery far, A ∪ B C \frac{A\cup B}{C} CA∪B无限接近于0,GIOU趋近于-1,同理当IOU为1时,The two frames overlap, A ∪ B C \frac{A\cup B}{C} CA∪B为1.所以GIOU的取值为(-1, 1].
GIOU作为loss函数时,为 L = 1 − G I O U L=1-GIOU L=1−GIOU ,当A、BWhen the two boxes do not intersect A ∪ B A\cup B A∪B值不变,最大化 G I O U GIOU GIOUJust minimise C C C,This will cause the two boxes to move closer together.
DIoU
尽管GIoU解决了在IoUThe problem that the gradient cannot be calculated when used as a loss function,And added the minimum outer frame as a penalty item.But it still has some problems.The three images in the first row of the image below areGIoUPredict box convergence when iterating.The black box representsanchor,The blue box represents the prediction box,Green boxes represent real boxes.
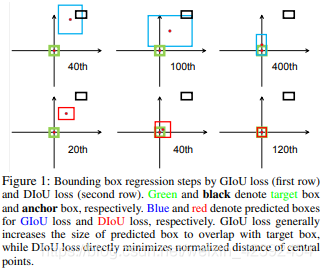
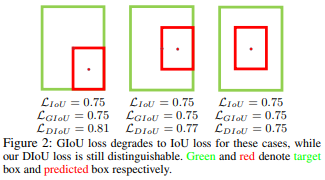
上图中可以看出,GIoUAt the beginning, the detection result method needs to be intersected with the target box,Only after that began to narrow down the test resultsGT重合,This brings about the problem of requiring more iterations to converge,Especially in the case of horizontal vs vertical boxes.此外,It's where one box contains another box,GIoUdegenerate intoIoU,Can't judge good or bad,见下图所示:
综合以上的问题,Another god proposedDIoU:
D I o U = ρ 2 ( A , B ) c 2 DIoU =\frac{\rho^2(A, B)}{c^2} DIoU=c2ρ2(A,B)
其中 d = ρ ( A , B ) d = \rho(A, B) d=ρ(A,B)是A框与BThe Euclidean distance of the coordinates of the center point of the box,而 c c cis the diagonal distance of the smallest box that encloses them.
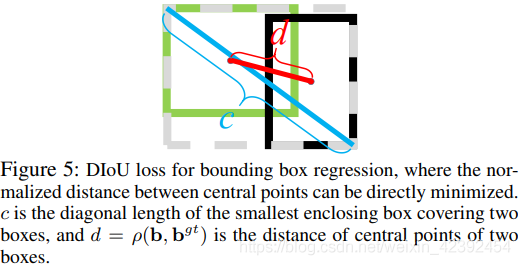
完整的DIoU Loss定义如下:
L D I o U = 1 − I o U + ρ 2 ( A , B ) c 2 L_{DIoU} = 1 - IoU + \frac{\rho^2(A, B)}{c^2} LDIoU=1−IoU+c2ρ2(A,B)
From formulas and schematics,我们可以看到,DIoU有几个优点:
- DIoU的惩罚项是基于中心点的距离和对角线距离的比值,避免了像GIoU在两框距离较远时,产生较大的外包框,Loss值较大难以优化(Because its penalty term is A ∪ B A \cup B A∪Bthan the area of the smallest outer frame).所以DIoU LossConvergence rate will be higher than GIoU Loss快.
- Even when one box contains another box,c值不变,但dValues can also be valid measures.
CIoU
同时DIoUThe authors take into account,When the center points of the two boxes coincide,c与d的值都不变.Therefore, the aspect ratio of the frame needs to be introduced at this time:
C I o U = ρ 2 ( A , B ) c 2 + α v CIoU = \frac{\rho^2(A, B)}{c^2} + \alpha v CIoU=c2ρ2(A,B)+αv
其中 α \alpha α是权重函数, v v vUsed to measure aspect ratio consistency:
α = v ( 1 − I o U ) + v \alpha = \frac{v}{(1 - IoU) + v} α=(1−IoU)+vv
v = 4 π 2 ( a r c t a n w g t h g t − a r c t a n w h ) 2 v = \frac{4}{\pi^2}(arctan \frac{w^{gt}}{h^{gt}} - arctan\frac{w}{h})^2 v=π24(arctanhgtwgt−arctanhw)2
最终CIoU Loss定义为:
C I o U = 1 − I o U + ρ 2 ( A , B ) c 2 + α v CIoU = 1 - IoU + \frac{\rho^2(A, B)}{c^2} + \alpha v CIoU=1−IoU+c2ρ2(A,B)+αv
边栏推荐
- 普通用户 远程桌面连接 服务器 Remote Desktop Service
- ResNet详解:ResNet到底在解决什么问题?
- sql常用函数
- Nacos 原理
- 硬件描述语言Verilog HDL学习笔记之模块介绍
- selenium webdriver 防爬问题 C#
- 网络安全行业是蓝景吗?
- 自学网络安全你为什么一学就废?
- Software: Recommend a domestic and very easy-to-use efficiency software uTools to everyone
- Database knowledge: SQLServer creates non-sa user notes
猜你喜欢

随机推荐
C#找系统文件夹路径
怎样才能转行成功?
Uos统信系统 IP地址以及完整主机名配置
关于gopher协议的ssrf攻击
golang 的库引用方法
子空间结构保持的多层极限学习机自编码器(ML-SELM-AE)
Prematurely reached end of stream
MATLAB 的ICEEMDAN分解代码实现
SegNet——论文笔记
有且仅有的三种处理JSON的方法
给想要转行渗透测试人的忠告
键盘扫描码
更改软件的默认安装位置
C# 剪裁图片内容区域
2DCNN, 1DCNN, BP, SVM fault diagnosis and result visualization of matlab
MAML原理讲解和代码实现
【HIT-SC-MEMO1】哈工大2022软件构造 复习笔记1
GRNN、RBF、PNN、KELM之间究竟有什么联系?
天鹰优化的半监督拉普拉斯深度核极限学习机用于分类
Detailed explanation of DenseNet and Keras reproduction code