当前位置:网站首页>Vector control of Brushless DC motor (4): sensorless control based on sliding mode observer
Vector control of Brushless DC motor (4): sensorless control based on sliding mode observer
2022-06-13 06:23:00 【Forster-C】
In more and more application scenarios , Brushless DC motor began to adopt the control mode without position sensor . Brushless DC motor operates at medium and high speed , The back EMF signal can be used to estimate the rotor position , There is more than one way to implement it , The sliding mode observer method is widely used .
In this paper, the basic principles of this method are sorted out , This paper introduces the in MATLAB/Simulink Modeling and simulation process in , Finally, a complete model file is attached .
One 、 The basic principle
Sliding mode observer ( Hereinafter referred to as" SMO) It is a state observer based on sliding mode variable structure control method . The realization process of rotor position estimation for brushless DC motor is as follows .
Suppose a brushless DC motor with vector control d Shaft inductance and q The shaft inductance is equal ( about PMSM This assumption holds ), namely Ld=Lq=L, Can write brushless DC motor in α-β Voltage equation in coordinate system :


In style ,uα、uβ Respectively α-β In a coordinate system α Axis 、β Axis voltage component ,iα、iβ Is the current component ,eα、eβ Is the back EMF , The expression is


In style ,ψf Magnitude of the flux linkage generated for the magnetic field of the rotor permanent magnet ,ωe Is the electrical angular velocity of the rotor ,θe Is the electrical angle of the rotor .
According to the expression of back EMF , Back EMF eα、eβ Contains rotor position information . According to the voltage equation , utilize SMO Get an estimate of the back EMF , Then the estimated value of rotor position can be obtained from the expression of back EMF , This is it. SMO The whole idea of rotor position estimation of Brushless DC motor .
First , The sliding mode observer is designed according to the voltage equation :


In style , 、
、 Is the estimated value of the current component ,zα、zβ Is the sliding mode control function .
Is the estimated value of the current component ,zα、zβ Is the sliding mode control function .
Select sliding mode switching surface :


Constructing sliding mode control function :


k Is the coefficient of a symbolic function ,sgn It's a symbolic function .
According to the voltage equation and the sliding mode observer equation :


In style :


If k Select the appropriate value , When SMO When entering the sliding surface , Yes


Then we can get the following relationship :


namely zα、zβ Infinite approximation eα、eβ, Thus, the back EMF value can be estimated . After proper filtering ( Because of what you get zα、zβ High frequency switching signal ), The estimated value of the back EMF can be obtained :


Get the estimated value of rotor electric angle :

In addition, the delay of the filter is compensated :

Finally, the estimated value of rotor electric angle and speed can be obtained :


That's all SMO The overall process of , You can use pictures 1 schematic . The process is sorted out , Then we can MATLAB/Simulink Build the corresponding model in .

chart 1 SMO Flow chart
Two 、 Modeling process
The main circuit topology is shown in the figure 3 Shown , The DC power supply drives the brushless DC motor through a three-phase full bridge converter , use FOC Control algorithm . The load torque of Brushless DC motor can be adjusted dynamically .
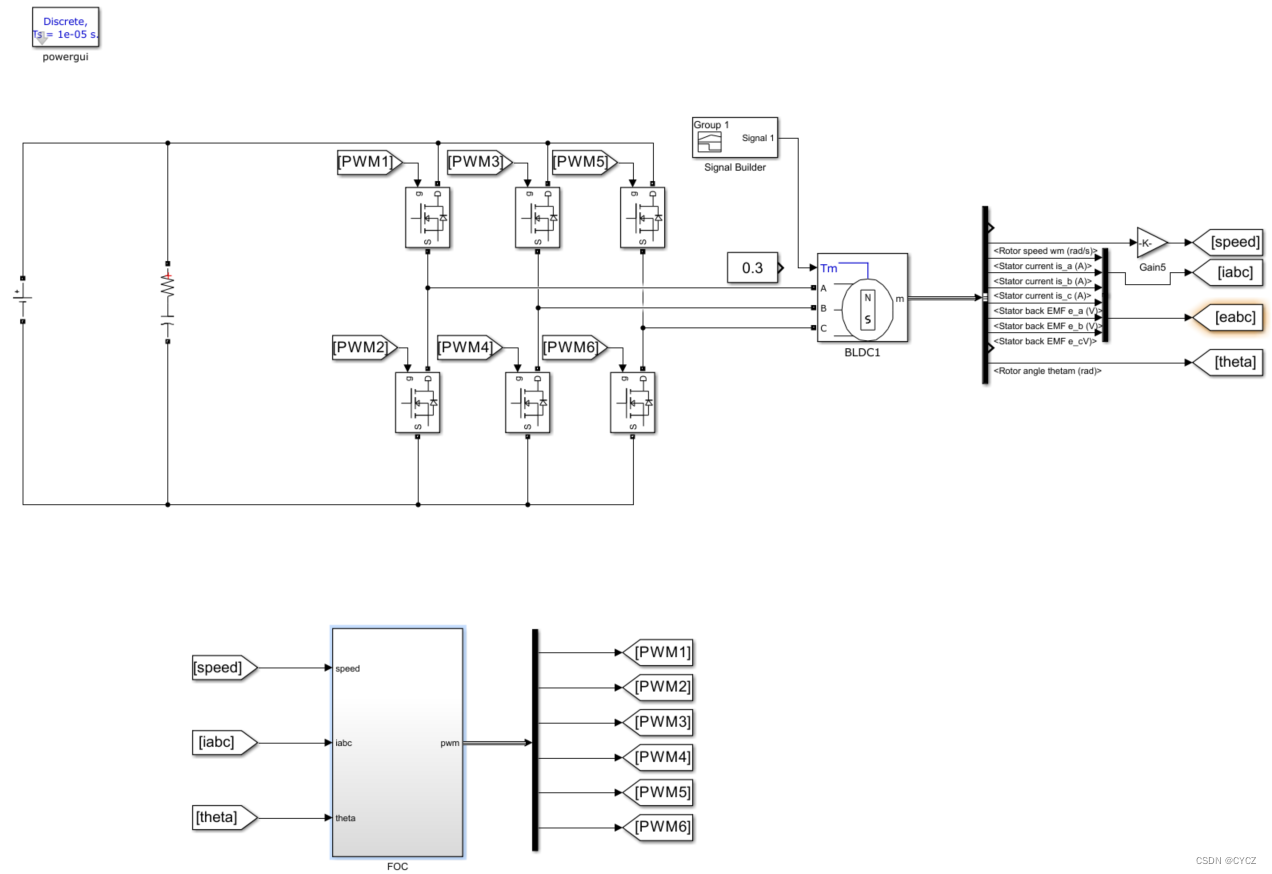
chart 2 Main circuit topology
The control circuit is shown in the figure 3 Shown , Use traditional FOC Control logic ,q The outer ring of the shaft controls the speed , The inner loop controls the current ,d Shaft for id=0 control . The sensor signal is directly used in the low-speed stage , Perform sensory control ; The high-speed phase is switched to SMO, Pictured 4 Shown .SMO Use the logic described above , Estimate the motor position .

chart 3 Control circuit topology

chart 4 SMO technological process
3、 ... and 、 Result analysis

chart 5 Actual speed

chart 6 Motor angle
Four 、 reference
SMO The following references are used in the modeling process :
[1] Zhouchenglin . Research on Sensorless Control Technology of permanent magnet synchronous motor [D]. Zhejiang : Zhejiang University , 2019.
attach : Model download link
边栏推荐
- Recyclerview has data flicker problem using databinding
- App performance test: (IV) power
- [MySQL] basic knowledge review
- High burst solution 2
- Uniapp hides the scroll bar of scroll view
- 无刷直流电机矢量控制(四):基于滑模观测器的无传感器控制
- Dynamic link library nesting example
- The boys x pubgmobile linkage is coming! Check out the latest game posters
- Basic knowledge of knowledge map
- Adding classes dynamically in uni app
猜你喜欢

Echart histogram: stacked histogram displays value

《MATLAB 神经网络43个案例分析》:第11章 连续Hopfield神经网络的优化——旅行商问题优化计算

js将文本转成语言播放

pthon 执行 pip 指令报错 You should consider upgrading via ...

c语言对文件相关的处理和应用

Wechat applet custom tabbar (session customer service) vant

Rk3399 hid gadget configuration

RFID process management solution for electroplating fixture

El form form verification
无刷直流电机矢量控制(四):基于滑模观测器的无传感器控制
随机推荐
Using the shutter floor database framework
Uni app disable native navigation bar
Explication détaillée du triangle Yang hui
二分查找
Commit specification
SSM框架整合--->简单后台管理
Local file search tool everything
App performance test: (III) traffic monitoring
Data conversion analysis tool
View绘制整体流程简析
电镀挂具RFID工序管理解决方案
Echart矩形树图:简单实现矩形树图
ADB shell sendent debug input event
c语言对文件相关的处理和应用
Wechat applet (function transfer parameters, transfer multiple parameters, page Jump)
微信小程序:全局状态变量的使用
After clicking the uniapp e-commerce H5 embedded applet, the page prompts "the page iframe does not support referencing non business domain names"
微信小程序:基础复习
Relationship between fragment lifecycle and activity
Wechat applet development (requesting background data and encapsulating request function)