当前位置:网站首页>[mathematics] [continuum mechanics] symmetry tensor, strain tensor and stress tensor in fluid mechanics
[mathematics] [continuum mechanics] symmetry tensor, strain tensor and stress tensor in fluid mechanics
2022-06-10 23:52:00 【beidou111】
List of articles
The origin of the problem
stay splishsplash Thesis tutorial among , When it comes to stickiness , There is such a page PPT
This is the basic knowledge of fluid mechanics , That is, it is constructed by Newton constitutive model NS equation .
Let's first look at the formula on the left

It is called Cauchy momentum equation . This equation is applicable to both fluid mechanics and solid mechanics . Therefore, it can be regarded as NS The existence of more fundamental equations . It's actually a linear momentum equation . The acceleration on the left , On the right is internal power ( Expressed by stress , Is surface force ) And external forces ( Usually physical strength ).
among T It's the stress tensor .
Let's look at the formula on the right .

This formula is Newton's constitutive equation . Equations constructed for Newtonian fluids . If it wasn't Newtonian fluid , Not applicable . The so-called constitutive equation , Is to find the relationship between stress and strain . actually , In terms of Solid Mechanics , The second equation is a geometric equation . The first equation is the physical equation , Or constitutive equation . We don't distinguish between , It's called his constitutive equation .
however , Our focus is not on the equation itself . Our aim is to make readers Be familiar with these mathematical signs The meaning of . in other words , We from Tensor mathematics Look at these quantities from the angle of What is the form of a matrix that we are familiar with ?
Nothing else is difficult . The only thing we are not familiar with is the velocity gradient . namely
∇ v \nabla \mathbf{v} ∇v
We previously wrote a popular introduction to tensors , as follows :
https://blog.csdn.net/weixin_43940314/article/details/123559800
velocity gradient
Velocity is obviously a vector
v = ( u , v , w ) T \mathbf{v} = (u, v, w)^T v=(u,v,w)T
and nabla The operator is just a vector
∇ = ( ∂ ∂ x , ∂ ∂ y , ∂ ∂ z ) T \nabla = (\frac{\partial}{\partial x}, \frac{\partial}{\partial y}, \frac{\partial}{\partial z})^T ∇=(∂x∂,∂y∂,∂z∂)T
Vector and vector write together , There is no sign in the middle , It's actually a multiplication of ( Also called dyadic ). Sometimes we take the initiative to add a symbol , It's written in ⨂ \bigotimes ⨂.
Actually , gradient Namely nabla Multiplication of operators and physical quantities .
What rule does the multiplication follow ?
Union multiplication and dot multiplication 、 Cross multiplication is different , It does nothing ! Just simply write the vectors side by side .
Besides , remember : And multiplication is ascending , The order of the result is to add up the original order !
Let's write the union multiplication in the familiar matrix form .
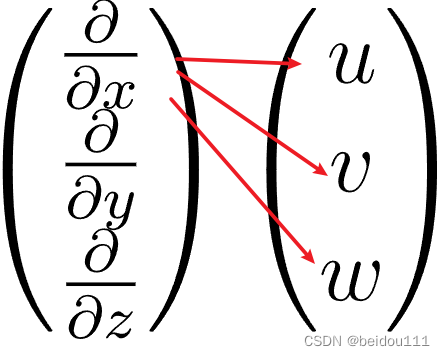
We write line by line
∇ ⊗ v = ( ∂ ∂ x ∂ ∂ y ∂ ∂ z ) ⊗ ( u v w ) \nabla \otimes \mathbf{v} = \begin{pmatrix} \frac{\partial}{\partial x} \\ \frac{\partial}{\partial y}\\ \frac{\partial}{\partial z} \end{pmatrix} \otimes \begin{pmatrix} u \\ v\\ w \end{pmatrix} ∇⊗v=⎝⎛∂x∂∂y∂∂z∂⎠⎞⊗⎝⎛uvw⎠⎞
1 first line
The corresponding items are simply written side by side
1.1 Component and form
Write in the form of component sum
∂ u ∂ x i i + ∂ v ∂ x i j + ∂ w ∂ x i k \frac{\partial u}{\partial x} \mathbf{ii} + \frac{\partial v}{\partial x }\mathbf{ij} + \frac{\partial w}{\partial x} \mathbf{ik} ∂x∂uii+∂x∂vij+∂x∂wik
1.2 Matrix form
Or in the form of a matrix
That is to say
( ∂ u ∂ x ∂ v ∂ x ∂ w ∂ x ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ) \begin{pmatrix} \frac{\partial u}{\partial x} & \frac{\partial v}{\partial x } & \frac{\partial w}{\partial x} \\ \cdots & \cdots & \cdots\\ \cdots & \cdots & \cdots\\ \end{pmatrix} ⎝⎛∂x∂u⋯⋯∂x∂v⋯⋯∂x∂w⋯⋯⎠⎞
2 The second line
Empathy

2.1 Component and form
Write in the form of component sum
∂ u ∂ y i i + ∂ v ∂ y i j + ∂ w ∂ y i k \frac{\partial u}{\partial y} \mathbf{ii} + \frac{\partial v}{\partial y }\mathbf{ij} + \frac{\partial w}{\partial y} \mathbf{ik} ∂y∂uii+∂y∂vij+∂y∂wik
2.2 Matrix form
Or in the form of a matrix
That is to say
( ⋯ ⋯ ⋯ ∂ u ∂ y ∂ v ∂ y ∂ w ∂ y ⋯ ⋯ ⋯ ) \begin{pmatrix} \cdots & \cdots & \cdots\\ \frac{\partial u}{\partial y} & \frac{\partial v}{\partial y} & \frac{\partial w}{\partial y}\\ \cdots & \cdots & \cdots\\ \end{pmatrix} ⎝⎛⋯∂y∂u⋯⋯∂y∂v⋯⋯∂y∂w⋯⎠⎞
3 The third line
Empathy 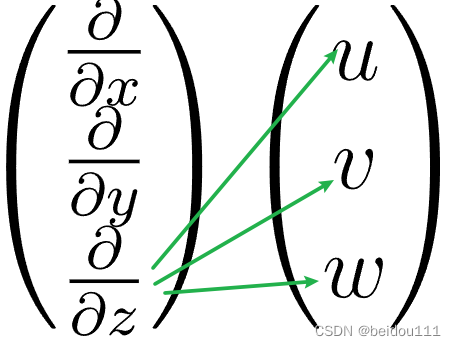
3.1 Component and form
Write in the form of component sum
∂ u ∂ z i i + ∂ v ∂ z i j + ∂ w ∂ z i k \frac{\partial u}{\partial z} \mathbf{ii} + \frac{\partial v}{\partial z }\mathbf{ij} + \frac{\partial w}{\partial z} \mathbf{ik} ∂z∂uii+∂z∂vij+∂z∂wik
3.2 Matrix form
Or in the form of a matrix
That is to say
( ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ∂ u ∂ z ∂ v ∂ z ∂ w ∂ z ) \begin{pmatrix} \cdots & \cdots & \cdots\\ \cdots & \cdots & \cdots\\ \frac{\partial u}{\partial z} & \frac{\partial v}{\partial z} & \frac{\partial w}{\partial z}\\ \end{pmatrix} ⎝⎛⋯⋯∂z∂u⋯⋯∂z∂v⋯⋯∂z∂w⎠⎞
4 Close together

Component and form
∇ v = ∂ u ∂ x i i + ∂ v ∂ x i j + ∂ w ∂ x i k + ∂ u ∂ y i i + ∂ v ∂ y i j + ∂ w ∂ y i k + ∂ u ∂ z i i + ∂ v ∂ z i j + ∂ w ∂ z i k \nabla \mathbf{v} = \\ \frac{\partial u}{\partial x} \mathbf{ii} + \frac{\partial v}{\partial x }\mathbf{ij} + \frac{\partial w}{\partial x} \mathbf{ik} + \\ \frac{\partial u}{\partial y} \mathbf{ii} + \frac{\partial v}{\partial y }\mathbf{ij} + \frac{\partial w}{\partial y} \mathbf{ik} + \\ \frac{\partial u}{\partial z} \mathbf{ii} + \frac{\partial v}{\partial z }\mathbf{ij} + \frac{\partial w}{\partial z} \mathbf{ik} ∇v=∂x∂uii+∂x∂vij+∂x∂wik+∂y∂uii+∂y∂vij+∂y∂wik+∂z∂uii+∂z∂vij+∂z∂wik
Matrix form
( ∂ u ∂ x ∂ v ∂ x ∂ w ∂ x ∂ u ∂ y ∂ v ∂ y ∂ w ∂ y ∂ u ∂ z ∂ v ∂ z ∂ w ∂ z ) \begin{pmatrix} \frac{\partial u}{\partial x} & \frac{\partial v}{\partial x } & \frac{\partial w}{\partial x} \\ \frac{\partial u}{\partial y} & \frac{\partial v}{\partial y} & \frac{\partial w}{\partial y}\\ \frac{\partial u}{\partial z} & \frac{\partial v}{\partial z} & \frac{\partial w}{\partial z}\\ \end{pmatrix} ⎝⎛∂x∂u∂y∂u∂z∂u∂x∂v∂y∂v∂z∂v∂x∂w∂y∂w∂z∂w⎠⎞
Symmetric tensor
We write the velocity gradient , Now let's look at the symmetric tensor
∇ v + ( ∇ v ) T \nabla \mathbf{v} + (\nabla \mathbf{v})^T ∇v+(∇v)T
It's just the velocity gradient plus its own transpose .
Transpose is to write rows into columns , Columns are written in rows .
Let's write transpose first
( ∇ v ) T = ( ∂ u ∂ x ∂ u ∂ y ∂ u ∂ z ∂ v ∂ x ∂ v ∂ y ∂ v ∂ z ∂ w ∂ x ∂ w ∂ y ∂ w ∂ z ) (\nabla \mathbf{v})^T= \begin{pmatrix} \frac{\partial u}{\partial x} & \frac{\partial u}{\partial y } & \frac{\partial u}{\partial z} \\ \frac{\partial v}{\partial x} & \frac{\partial v}{\partial y} & \frac{\partial v}{\partial z}\\ \frac{\partial w}{\partial x} & \frac{\partial w}{\partial y} & \frac{\partial w}{\partial z}\\ \end{pmatrix} (∇v)T=⎝⎜⎛∂x∂u∂x∂v∂x∂w∂y∂u∂y∂v∂y∂w∂z∂u∂z∂v∂z∂w⎠⎟⎞
Then add them up
( ∂ u ∂ x ∂ v ∂ x ∂ w ∂ x ∂ u ∂ y ∂ v ∂ y ∂ w ∂ y ∂ u ∂ z ∂ v ∂ z ∂ w ∂ z ) + ( ∂ u ∂ x ∂ u ∂ y ∂ u ∂ z ∂ v ∂ x ∂ v ∂ y ∂ v ∂ z ∂ w ∂ x ∂ w ∂ y ∂ w ∂ z ) = ( 2 ∂ u ∂ x ∂ v ∂ x + ∂ u ∂ y ∂ w ∂ x + ∂ u ∂ z ∂ u ∂ y + ∂ v ∂ x 2 ∂ v ∂ y ∂ w ∂ y + ∂ v ∂ z ∂ u ∂ z + ∂ w ∂ x ∂ v ∂ z + ∂ w ∂ y 2 ∂ w ∂ z ) \begin{pmatrix} \frac{\partial u}{\partial x} & \frac{\partial v}{\partial x } & \frac{\partial w}{\partial x} \\ \frac{\partial u}{\partial y} & \frac{\partial v}{\partial y} & \frac{\partial w}{\partial y}\\ \frac{\partial u}{\partial z} & \frac{\partial v}{\partial z} & \frac{\partial w}{\partial z}\\ \end{pmatrix} + \begin{pmatrix} \frac{\partial u}{\partial x} & \frac{\partial u}{\partial y } & \frac{\partial u}{\partial z} \\ \frac{\partial v}{\partial x} & \frac{\partial v}{\partial y} & \frac{\partial v}{\partial z}\\ \frac{\partial w}{\partial x} & \frac{\partial w}{\partial y} & \frac{\partial w}{\partial z}\\ \end{pmatrix} =\\ \begin{pmatrix} 2\frac{\partial u}{\partial x} &\frac{\partial v}{\partial x }+\frac{\partial u}{\partial y } & \frac{\partial w}{\partial x}+\frac{\partial u}{\partial z} \\ \frac{\partial u}{\partial y}+\frac{\partial v}{\partial x} & 2\frac{\partial v}{\partial y} & \frac{\partial w}{\partial y}+\frac{\partial v}{\partial z}\\ \frac{\partial u}{\partial z}+\frac{\partial w}{\partial x} & \frac{\partial v}{\partial z}+\frac{\partial w}{\partial y} & 2 \frac{\partial w}{\partial z}\\ \end{pmatrix} ⎝⎛∂x∂u∂y∂u∂z∂u∂x∂v∂y∂v∂z∂v∂x∂w∂y∂w∂z∂w⎠⎞+⎝⎜⎛∂x∂u∂x∂v∂x∂w∂y∂u∂y∂v∂y∂w∂z∂u∂z∂v∂z∂w⎠⎟⎞=⎝⎜⎛2∂x∂u∂y∂u+∂x∂v∂z∂u+∂x∂w∂x∂v+∂y∂u2∂y∂v∂z∂v+∂y∂w∂x∂w+∂z∂u∂y∂w+∂z∂v2∂z∂w⎠⎟⎞
We look at this matrix
∇ v + ( ∇ v ) T = ( 2 ∂ u ∂ x ∂ v ∂ x + ∂ u ∂ y ∂ w ∂ x + ∂ u ∂ z ∂ u ∂ y + ∂ v ∂ x 2 ∂ v ∂ y ∂ w ∂ y + ∂ v ∂ z ∂ u ∂ z + ∂ w ∂ x ∂ v ∂ z + ∂ w ∂ y 2 ∂ w ∂ z ) \nabla \mathbf{v} + (\nabla \mathbf{v})^T= \begin{pmatrix} 2\frac{\partial u}{\partial x} &\frac{\partial v}{\partial x }+\frac{\partial u}{\partial y } & \frac{\partial w}{\partial x}+\frac{\partial u}{\partial z} \\ \frac{\partial u}{\partial y}+\frac{\partial v}{\partial x} & 2\frac{\partial v}{\partial y} & \frac{\partial w}{\partial y}+\frac{\partial v}{\partial z}\\ \frac{\partial u}{\partial z}+\frac{\partial w}{\partial x} & \frac{\partial v}{\partial z}+\frac{\partial w}{\partial y} & 2 \frac{\partial w}{\partial z}\\ \end{pmatrix} ∇v+(∇v)T=⎝⎜⎛2∂x∂u∂y∂u+∂x∂v∂z∂u+∂x∂w∂x∂v+∂y∂u2∂y∂v∂z∂v+∂y∂w∂x∂w+∂z∂u∂y∂w+∂z∂v2∂z∂w⎠⎟⎞
Two features can be easily found :
- It's symmetrical
- The diagonal element has a coefficient 2
actually , Any matrix plus its transpose is symmetric . It's easy to figure that out .
therefore , In hydrodynamics , We call it Symmetric tensor Okay .( Wild but simple names )
By the way , stay OpenFOAM among , Its code representation is
twoSymm(gradU)
Why add a two Well ? Because it is 2 Times the strain tensor . We can actually remember this way : Its diagonal element has a coefficient 2.
Strain tensor
Said just now , The strain tensor is actually 1/2 The symmetric tensor of .
E = 1 2 ( ∇ v + ( ∇ v ) T ) E = \frac{1}{2}(\nabla \mathbf{v} + (\nabla \mathbf{v})^T) E=21(∇v+(∇v)T)
Simple and clear .
Stress tensor
Up to the top , We don't use Newton's constitutive law . in other words , The above applies to any fluid .
At this time, Newton's constitutive equation is inserted .
Suppose it is a Newtonian fluid
T = − p 1 + 2 μ E \mathbf{T}=-p \mathbb{1}+2 \mu \mathbf{E} T=−p1+2μE
there 1 It's a unit array .
So it's nothing more than multiplying by a few coefficients .
T = − p 1 + 2 μ E = ( 2 μ ∂ u ∂ x − p μ ( ∂ v ∂ x + ∂ u ∂ y ) μ ( ∂ w ∂ x + ∂ u ∂ z ) μ ( ∂ u ∂ y + ∂ v ∂ x ) 2 μ ∂ v ∂ y − p μ ( ∂ w ∂ y + ∂ v ∂ z ) μ ( ∂ u ∂ z + ∂ w ∂ x ) μ ( ∂ v ∂ z + ∂ w ∂ y ) 2 μ ∂ w ∂ z − p ) \mathbf{T}=-p \mathbb{1}+2 \mu \mathbf{E}=\\ \begin{pmatrix} 2\mu \frac{\partial u}{\partial x} -p & \mu ( \frac{\partial v}{\partial x }+\frac{\partial u}{\partial y }) & \mu ( \frac{\partial w}{\partial x}+\frac{\partial u}{\partial z}) \\ \mu ( \frac{\partial u}{\partial y}+ \frac{\partial v}{\partial x}) & 2\mu \frac{\partial v}{\partial y}-p & \mu ( \frac{\partial w}{\partial y}+\frac{\partial v}{\partial z})\\ \mu ( \frac{\partial u}{\partial z}+ \frac{\partial w}{\partial x}) & \mu ( \frac{\partial v}{\partial z}+\frac{\partial w}{\partial y}) & 2\mu \frac{\partial w}{\partial z}-p\\ \end{pmatrix} T=−p1+2μE=⎝⎜⎛2μ∂x∂u−pμ(∂y∂u+∂x∂v)μ(∂z∂u+∂x∂w)μ(∂x∂v+∂y∂u)2μ∂y∂v−pμ(∂z∂v+∂y∂w)μ(∂x∂w+∂z∂u)μ(∂y∂w+∂z∂v)2μ∂z∂w−p⎠⎟⎞
end
2022-6-10
边栏推荐
- LabVIEW prohibits other multi-core processing applications from executing on all cores
- LabVIEW phase locked loop (PLL)
- The shell script of pagoda plan task regularly deletes all files under a directory [record]
- OSS stores and exports related content
- Redis installation and common problem solving based on centeros7 (explanation with pictures)
- Six procurement challenges perplexing Enterprises
- LabVIEW确定控件在显示器坐标系中的位置
- Is it safe for BOC securities to open an account? Is it formal?
- High speed data stream disk for LabVIEW
- Build TAR model using beersales data set in TSA package
猜你喜欢

iframe框架自适应大小/全屏显示网页框架的方法

BGP - route map extension (explanation + configuration)

LabVIEW open other exe programs

The time (in minutes) required for a group of workers to cooperate to complete the assembly process of a part are as follows:

Halcon combined with C # to detect surface defects -- affine transformation (II)

LeetCode+ 21 - 25

LabVIEW uses the visa read function to read USB interrupt data

Example analysis of SQL query optimization principle

LabVIEW performs a serial loopback test

LabVIEW中NI MAX中缺少串口
随机推荐
csdn每日一练——有序表的折半查找
LabVIEW或MAX下的VISA测试面板中串口无法工作
OpenResty安装
Interface test learning notes
File转为MultipartFile的方法
给线程池里面线程添加名称的4种方式
基于CenterOS7安装Redis及常见问题解决(带图讲解)
【无标题】
1. open the R program, and use the apply function to calculate the sum of 1 to 12 in the sequence of every 3 numbers. That is, calculate 1+4+7+10=? 2+5+8+11=?, 3+6+9+12=?
Creating dynamic two-dimensional array with C language
Solutions to the error reported by executing Oracle SQL statement [ora-00904: "createtime": invalid identifier] and [ora-00913: too many values]
Two aspects of embedded audio development
【二叉树】二叉树剪枝
Is qiniu's securities account true? Is it safe?
[untitled]
Ilruntime hotfix framework installation and breakpoint debugging
LabVIEW使用MathScript Node或MATLAB脚本时出现错误1046
Data and information resource sharing platform (VII)
Is it safe to open an account online in Shanghai?
iframe框架自适应大小/全屏显示网页框架的方法