当前位置:网站首页>C # joint Halcon application - Dahua camera acquisition class
C # joint Halcon application - Dahua camera acquisition class
2022-07-01 19:58:00 【123 mengye】
Dahua camera acquisition class
class Camera // Dahua cameras
{
private IDevice m_dev; /* Device objects */
List<IGrabbedRawData> m_frameList = new List<IGrabbedRawData>(); /* Image cache list */
Thread renderThread = null; /* Show threads */
bool m_bShowLoop = true; /* Thread control variables */
Mutex m_mutex = new Mutex(); /* lock , Ensure multithreading safety */
// public event Action<HObject> NewImage; // The image shows the event
public Camera()
{
if (null == renderThread)
{
renderThread = new Thread(new ThreadStart(ShowThread));
renderThread.IsBackground = true;
renderThread.Start();
}
m_stopWatch.Start();// The timing starts
}
/* Transcoding display thread */
private void ShowThread()
{
while (m_bShowLoop)// The thread control variable is True
{
if (m_frameList.Count == 0) // Image cache list
{
Thread.Sleep(10);
continue;
}
/* The image queue takes the latest frame */
m_mutex.WaitOne();// Block current thread , Until the current signal is received
IGrabbedRawData frame = m_frameList.ElementAt(0);// Returns the element at the specified index in the queue
m_frameList.RemoveAt(0);
m_frameList.Clear();
m_mutex.ReleaseMutex();
/* Actively call garbage collection */
GC.Collect();
/* The maximum frame rate of control display is 25FPS */
if (false == isTimeToDisplay())
{
continue;
}
try
{
/* Image transcoding bitmap Images */
var bitmap = frame.ToBitmap(false);
// Use the collected image here
//if (NewImage != null)
//{
// NewImage(image);
//}
}
catch
{
}
}
}
const int DEFAULT_INTERVAL = 40;// Default interval
Stopwatch m_stopWatch = new Stopwatch(); /* Time counter */
/* Judge whether the display operation should be done */
private bool isTimeToDisplay()
{
m_stopWatch.Stop();
long m_lDisplayInterval = m_stopWatch.ElapsedMilliseconds;// Get the total time measured by the instance
if (m_lDisplayInterval <= DEFAULT_INTERVAL)
{
m_stopWatch.Start();
return false;
}
else
{
m_stopWatch.Reset();
m_stopWatch.Start();
return true;
}
}
/* Camera open callback */
private void OnCameraOpen(object sender, EventArgs e)
{
// Record here that the camera has been turned on
}
/* Camera off callback */
private void OnCameraClose(object sender, EventArgs e)
{
// Record here that the camera is off
}
/* Camera lost callback */
private void OnConnectLoss(object sender, EventArgs e)
{
m_dev.ShutdownGrab();
m_dev.Dispose();
m_dev = null;
}
/* Bitstream data callback */
private void OnImageGrabbed(Object sender, GrabbedEventArgs e)
{
m_mutex.WaitOne();// m_mutex lock , Ensure multithreading safety
m_frameList.Add(e.GrabResult.Clone());/* Image cache list */
m_mutex.ReleaseMutex();
}
/// <summary>
/// Turn on camera
/// </summary>
/// <returns> If the return string is empty, it means that the opening is successful , If it is not empty, it means that the opening fails , The string content is exception information </returns>
/// <param name="triggerSource"> Trigger source selection Soft trigger or external trigger </param>
/// <returns></returns>
public string Open(string triggerSource)
{
string sRet = string.Empty;
try
{
/* Device search */
List<IDeviceInfo> li = Enumerator.EnumerateDevices();
if (li.Count > 0)
{
/* Get the first device searched */
m_dev = Enumerator.GetDeviceByIndex(0);
/* Register link events */
m_dev.CameraOpened += OnCameraOpen;
m_dev.ConnectionLost += OnConnectLoss;
m_dev.CameraClosed += OnCameraClose;
/* Turn on the device */
if (!m_dev.Open())
sRet = " Failed to open camera ";
/* Set up TriggerSource Soft trigger or external trigger */
m_dev.TriggerSet.Open(triggerSource);
/* Format image */
using (IEnumParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImagePixelFormat])
{
p.SetValue("Mono8");
}
/* Set the number of caches to 8( The default value is 16) */
m_dev.StreamGrabber.SetBufferCount(8);
/* Register the bitstream callback event */
m_dev.StreamGrabber.ImageGrabbed += OnImageGrabbed;
/* Start bitstream */
if (!m_dev.GrabUsingGrabLoopThread())
sRet = " Failed to start bitstream ";
}
else
{
sRet = " Camera device not found ";
}
}
catch (Exception e)
{
sRet = e.Message;
}
return sRet;
}
/// <summary>
/// Turn off camera
/// </summary>
/// <returns> If the return string is empty, it means that the shutdown is successful , If it is not empty, it means closing failed , The string content is exception information </returns>
public string Close()
{
string sRet = String.Empty;
1 try
{
if (m_dev == null)
{
sRet = "Device is invalid";
}
m_dev.StreamGrabber.ImageGrabbed -= OnImageGrabbed; /* Unregister callback */
m_dev.ShutdownGrab(); /* Stop the bitstream */
m_dev.Close(); /* Turn off camera */
}
catch (Exception e)
{
sRet = e.Message;
}
return sRet;
}
/* The window closed */
public void OnClosed(EventArgs e)
{
if (m_dev != null)
{
m_dev.Dispose();
m_dev = null;
}
m_bShowLoop = false;
renderThread.Join();
}
/// <summary>
/// Set the trigger mode Set under soft trigger On Post free pull flow ( Continuous trigger )Off( Single trigger )
/// </summary>
/// <param name="value"></param>
public string SetTriggerMode(string value = "On")
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
using (IEnumParameter p = m_dev.ParameterCollection[ParametrizeNameSet.TriggerMode])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Set the exposure
/// </summary>
/// <param name="value"></param>
public string SetExposureTime(float value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
double min = GetMinExposureTime();
double max = GetMaxExposureTime();
if (value < min || value > max)
{
return string.Format(" Parameter value is out of range ,min:{0},max:{1}", min, max);
}
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ExposureTime])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Set the gain
/// </summary>
/// <param name="value"></param>
public string SetGainRaw(float value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
double min = GetMinGainRaw();
double max = GetMaxGainRaw();
if (value < min || value > max)
{
return string.Format(" Parameter value is out of range ,min:{0},max:{1}", min, max);
}
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.GainRaw])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Set the width of the image
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageWidth(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
double min = GetMinImageWidth();
double max = GetMaxImageWidth();
if (value < min || value > max)
{
return string.Format(" Parameter value is out of range ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageWidth])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Set the width of the image
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageHeight(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
double min = GetMinImageHeight();
double max = GetMaxImageHeight();
if (value < min || value > max)
{
return string.Format(" Parameter value is out of range ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageHeight])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Set image offset X
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageOffsetX(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
double min = GetMinImageOffsetX();
double max = GetMaxImageOffsetX();
if (value < min || value > max)
{
return string.Format(" Parameter value is out of range ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetX])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Set image offset Y
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageOffsetY(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " The camera is not turned on ";
}
double min = GetMinImageOffsetY();
double max = GetMaxImageOffsetY();
if (value < min || value > max)
{
return string.Format(" Parameter value is out of range ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetY])
{
p.SetValue(value);
}
return "";
}
#region Get the value range of camera parameters
public double GetMinExposureTime()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ExposureTime])
{
return p.GetMinimum();
}
}
public double GetMaxExposureTime()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ExposureTime])
{
return p.GetMaximum();
}
}
public double GetMinGainRaw()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.GainRaw])
{
return p.GetMinimum();
}
}
public double GetMaxGainRaw()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.GainRaw])
{
return p.GetMaximum();
}
}
public long GetMinImageWidth()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageWidth])
{
return p.GetMinimum();
}
}
public long GetMaxImageWidth()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageWidth])
{
return p.GetMaximum();
}
}
public long GetMinImageHeight()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageHeight])
{
return p.GetMinimum();
}
}
public long GetMaxImageHeight()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageHeight])
{
return p.GetMaximum();
}
}
public long GetMinImageOffsetX()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetX])
{
return p.GetMinimum();
}
}
public long GetMaxImageOffsetX()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetX])
{
return p.GetMaximum();
}
}
public long GetMinImageOffsetY()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetY])
{
return p.GetMinimum();
}
}
public long GetMaxImageOffsetY()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetY])
{
return p.GetMaximum();
}
}
#endregion
/// <summary>
/// bitmap Image to HObject
/// </summary>
/// <param name="bmp"></param>
/// <returns></returns>
//private HObject Bitmap2HObjectBpp24(Bitmap bmp)
//{
// HObject Hobj;
// HOperatorSet.GenEmptyObj(out Hobj);
// try
// {
// Rectangle rect = new Rectangle(0, 0, bmp.Width, bmp.Height);
// BitmapData srcBmpData = bmp.LockBits(rect, ImageLockMode.ReadOnly, PixelFormat.Format24bppRgb);
// HOperatorSet.GenImageInterleaved(out Hobj, srcBmpData.Scan0, "bgr", bmp.Width, bmp.Height, 0, "byte", 0, 0, 0, 0, -1, 0);
// bmp.UnlockBits(srcBmpData);
// }
// catch (Exception e)
// {
// }
// return Hobj;
//}
}
边栏推荐
- [research materials] Huawei Technology ICT 2021: at the beginning of the "Yuan" year, the industry is "new" -- download attached
- 较真儿学源码系列-InheritableThreadLocal(逐行源码带你分析作者思路)
- 2022/5/23-2022/5/30
- Interesting! Database is also serverless!
- 由浅入深学会白盒测试用例设计
- Graduation season | Huawei experts teach the interview secret: how to get a high paying offer from a large factory?
- 【多线程】锁策略
- Wechat applet realizes keyword highlighting
- 1592 例题1 国王(Sgu223 LOJ10170 LUOGU1896 提高+/省选-) 暴力思考 状压DP 01背包
- [exercise] HashSet
猜你喜欢

JVM memory model
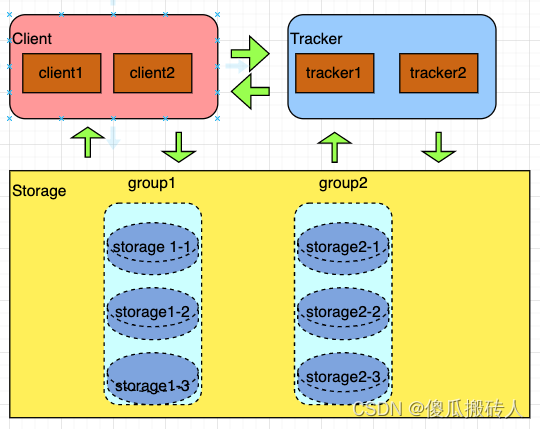
fastDFS入门

AAAI2020: Real-time Scene Text Detection with Differentiable Binarization
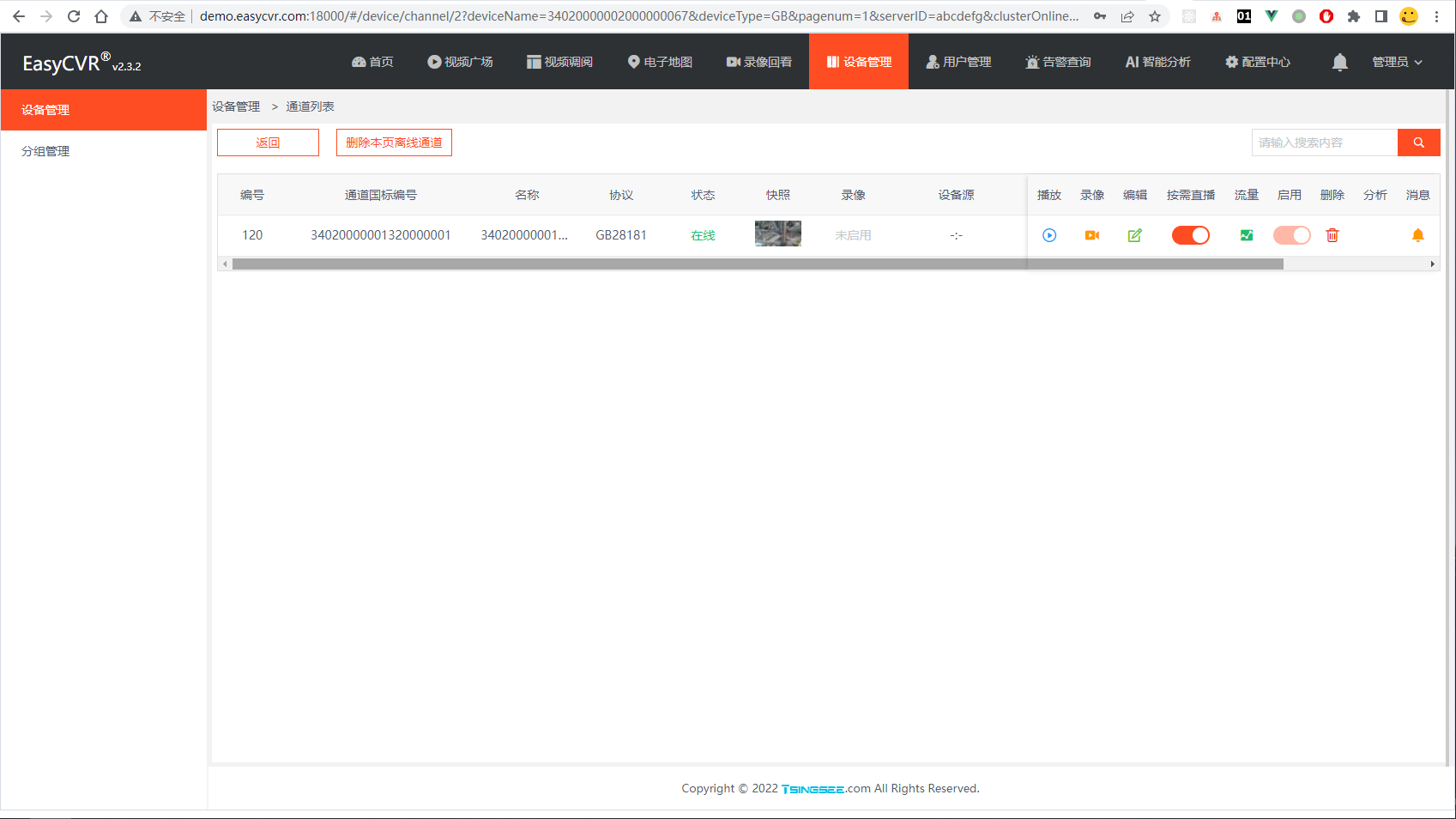
EasyCVR通过国标GB28181协议接入设备,出现设备自动拉流是什么原因?

Win11暂停更新点不了怎么办?Win11暂停更新是灰色的如何解决?

1592 例题1 国王(Sgu223 LOJ10170 LUOGU1896 提高+/省选-) 暴力思考 状压DP 01背包
Servlet knowledge points
![[AI server setup] CUDA environment](/img/ca/2acfc42ea3ba24934a89472a8632f6.png)
[AI server setup] CUDA environment
![[untitled]](/img/6c/df2ebb3e39d1e47b8dd74cfdddbb06.gif)
[untitled]

Graduation season | Huawei experts teach the interview secret: how to get a high paying offer from a large factory?
随机推荐
How can a programmer grow rapidly
uniapp使用腾讯地图选点 没有window监听回传用户的位置信息,怎么处理
自定义插入页面标签以及实现类似通讯录的首字母搜索
Interview question 1
Anaconda安装虚拟环境到指定路径
Cookie和Session的相关概念
1592 例题1 国王(Sgu223 LOJ10170 LUOGU1896 提高+/省选-) 暴力思考 状压DP 01背包
Process steps of vibrating wire acquisition module for measuring vibrating wire sensor
一个悄然崛起的国产软件,低调又强大!
A quietly rising domestic software, low-key and powerful!
开发那些事儿:EasyCVR集群设备管理页面功能展示优化
Servlet knowledge points
List is divided into sets that meet and do not meet conditions (partitioningby)
使用Zadig从0到1搭建持续交付平台
面试题篇一
Unreal Engine packaging project
简单但现代的服务器仪表板Dashdot
[research materials] iResearch tide Watching: seven major trends in the clothing industry - Download attached
ORA-01950
Hls4ml/vivado HLS error reporting solution