当前位置:网站首页>【Day42 文献精读】A Bayesian Model of Perceived Head-Centered Velocity during Smooth Pursuit Eye Movement
【Day42 文献精读】A Bayesian Model of Perceived Head-Centered Velocity during Smooth Pursuit Eye Movement
2022-07-27 07:37:00 【余阿Adzuki】
阅读文献:
Freeman, T. C. A., Champion, R. A., & Warren, P. A. (2010). A Bayesian Model of Perceived Head-Centered Velocity during Smooth Pursuit Eye Movement. Current Biology, 20(8), 757-762. https://doi.org/https://doi.org/10.1016/j.cub.2010.02.059
Summary
1) Aubert Fleishl phenomenon, Filehne illusion, trajectory misperception and the slalom illusion are some illusion that all demonstrate eye speed is underestimated with respect to image speed (Figure 1A).
2) Here we present an alternative Bayesian account, based on a idea that perceptual estimates are increasingly influenced by prior expectations as signals become more uncertain, and on an assumption that the prior for motion is centered on zero (slowness assumption) (Figure 1B).
Results

Figure 1B:
1) Slowness prior (representing expectations): For motion perception, a plausible prior is that objects are largely at rest. The prior is therefore centered on 0, in which case perceived speed decreases as uncertainty rises.
2) Sensory evidence or signals (likelihood): Sensory evidence is unbiased (i.e., accurate, no literal shift between two distributions of likelihood) but can vary in uncertainty (i.e., precision, dark distribution representing noiser signal is wider than light distribution).

Discrimination trials contained F(Fixation intervals/image motion/relative motion/R)-F or E(Eye pursuit intervals/eye motion/pursuit target motion/T)-E intervals.
Perceived-speed trials contained E-F or F-E intervals.
1) Figure 2B, left column:
① The discrimination data in the left column show that thresholds were higher for pursued stimuli(at slow speed), meaning that the speed of pursued stimuli was harder to discriminate than the speed of fixated stimuli→noiser signal→lower certainty or precision
② We were able to reproduce the thresholds we found very well, as the lines representing model fit circles representing data well.
③ Thresholds were approximately constant for faster speeds when expressed as a proportion of the standard which is known as Weber’s law. But our data also show that Weber’s law breaks down at slow speeds.
2) Figure 2B, right column: For all observers, fixated motion needed to be slowed by around 50% to achieve the perceived-speed match.
3) Figure 2C: Moreover, the accuracy of eye movements during fixation or pursuit could not explain the data.

Figure 3. Bayesian three-stage model
Velocity v is measured by an unbiased sensory signal with a mean of v. The signal is corrupted by Gaussian internal noise with a mean of 0 and standard deviation given by:
![]()
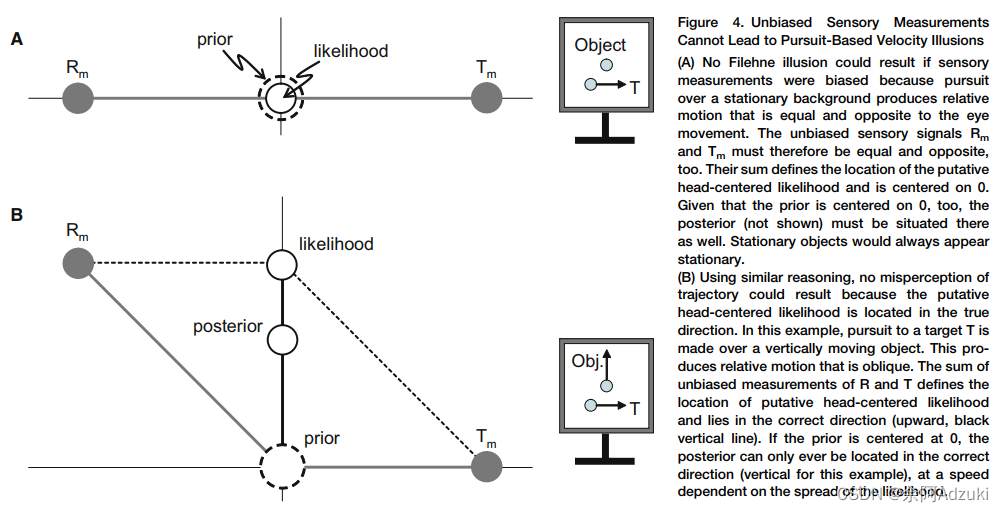
No Filehne illusion (Figure 4A) nor misperception of trajectory could result if sensory measurements were unbiased.
→One way to fix this alternative Bayesian account is to introduce biases into the initial sensory measurements.
Discussion
1) Based on the idea that sensory signals encoding the speed of eye motion and image motion differ in precision not accuracy, our Bayesian model is able to explain a range of pursuit-based velocity illusions.
2) It may be that variations in stimulus dimensions like contrast help explain why the degree of underestimation of eye speed varies across the studies shown in Figure 1A.
3) Unlike traditional accounts of head-centered motion perception, our new model emphasizes the role of relative motion and pursuit-target motion.
边栏推荐
- JS regular expression implementation adds a comma to every three digits
- Actual combat of flutter - Request encapsulation (I)
- 帮忙发一份招聘,base全国,有兴趣的可以过来看看
- Shell condition test, judgment statement and operator of shell system learning
- Do me a favor ~ don't pay attention, don't log in, a questionnaire in less than a minute
- mysql备份策略
- Plato Farm有望通过Elephant Swap,进一步向外拓展生态
- Comprehensive analysis of ADC noise-01-types of ADC noise and ADC characteristics
- 10000 word parsing MySQL index principle -- InnoDB index structure and reading
- Summary of several common ways to join dimension tables in Flink
猜你喜欢

DEMO:PA30 银行国家码默认CN 增强

【飞控开发基础教程4】疯壳·开源编队无人机-串口(光流数据获取)

防止Cookie修改id欺骗登录

C# 中的转译字符'/b'

杂谈:手里有竿儿,肩上有网,至于背篓里有多少鱼真的重要吗?

RPC 远程过程调用

C language implementation of guessing numbers Games project practice (based on srand function, rand function, switch statement, while loop, if condition criterion, etc.)

Bingbing's learning notes: classes and objects (middle)

帮个忙呗~不关注不登录,不到一分钟的一个问卷
Installation and use of apifox
随机推荐
Help send a recruitment, base all over the country. If you are interested, you can come and have a look
Interview reply V
slf4j如何进行logback配置呢?
模仿大佬制作的宿舍门禁系统(三)
[golang learning notes 2.1] sorting and searching in arrays in golang
Closed hash and open hash resolve hash conflicts
MCU multi-level menu
HU相关配置
Perl: split the external command to be executed into multiple lines
Okaleido ecological core equity Oka, all in fusion mining mode
ADC噪声全面分析 -01- ADC噪声的类型以及ADC特性
Systematic explanation of unit testing: mockito
Redison 3.17.5 release, officially recommended redis client
ARP broadcasting practice cases
小程序消息推送配置 Token校验失败,请检查确认
Leetcode54. 螺旋矩阵
ChromeDriver下载-自用
综合案例、
SQL statement batch update time minus 1 day
SQLite common function integration