当前位置:网站首页>Orbslam2 installation test and summary of various problems
Orbslam2 installation test and summary of various problems
2022-07-29 09:46:00 【weixin_ fifty-two million four hundred and two thousand three h】
Catalog
2. To configure c++ Compile environment
5. Configuration dependent environment
1.Pangolin Times wrong :‘No package ‘xkbcommon’ found’
2.error: ‘usleep’ was not declared in this scope usleep(5000);
3.collect2:error:id returued 1exit status
5.fatal error:Eigen/Core: There is no file or directory #include
6. install cimpiler error:killed(program cciplus)
Prepare a pure Ubuntu System , If this is the first installation , In this way, many pits can be mined less , It's just going to be used on the knife handle ( Manual formation ), My is 18.04, According to your own situation , Mainly ros Version of , The other version doesn't have much influence .
One 、 Install the test
ORBSLAM2 Summary of each dependency version
| Serial number | Dependencies | edition | Address |
|---|---|---|---|
| 1 | pangolin | v0.5 | Tags · stevenlovegrove/Pangolin · GitHub (0z.gs) |
| 2 | Eigen3 | 3.3.4 | 3.3.4 · Tags · libeigen / eigen · GitLab |
| 3 | opencv | 3.4.1 | Release OpenCV 3.4.1 · opencv/opencv · GitHub (0z.gs) |
| 4 | DBow2 | v1.1-free | Release v1.1-free · dorian3d/DBoW2 · GitHub (0z.gs) |
| 5 | g2o | 20170730_git | Release 20170730_git · RainerKuemmerle/g2o · GitHub (0z.gs) |
| 6 | Ros | melodic | One click installation series of Xiaoyu | Fish fragrance ROS (fishros.org.cn) |
After preparing the dependencies , Start installation
1. Update software list
sudo apt-get update
2. To configure c++ Compile environment
sudo apt-get install gcc
sudo apt-get install g++
sudo apt-get install cmake3. install vscode
Get into vscode Official website https://code.visualstudio.com/Download, On the download page , download .deb file .

Found downloaded .deb file , Double click to install .

After installation , You can find it under the main menu vscode, Right click to add to Favorites .

open VScode To configure
4. install git
sudo apt-get install git5. Configuration dependent environment

5.1 install Eigen3
sudo apt-get install libeigen3-dev5.2 install pangolin
 According to the official Dependencies, Install related dependencies , Most of these dependencies are optional , You can choose with your own needs , The following are the dependencies of the installation selected by the author , These items must be installed .
According to the official Dependencies, Install related dependencies , Most of these dependencies are optional , You can choose with your own needs , The following are the dependencies of the installation selected by the author , These items must be installed .
~$ sudo apt-get install libglew-dev
~$ sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-devEnter the path where the downloaded file is placed , Unzip the installation package .
tar -zxvf Pangolin-0.5.tar.gzEnter the installation package folder to install
cd Pangolin-0.5
mkdir build
cd build
cmake ..
make
sudo make installInstallation successful .

5.3 install OpenCV
And installation pangolin equally , First download the installation package from the official website , After configuring the necessary dependencies , Installation , The installation instructions are as follows , See the following execution process operation pictures for specific operations
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
sudo apt-get install ffmpeg
sudo apt-get install libavcodec-dev
sudo apt-get install libavformat-dev
sudo apt-get install libswscale-dev
// optional
sudo apt-get install libjpeg-dev libpng-dev libtiff-dev
// install
tar -zxvf opencv-3.4.1.tar.gz
cd opencv-3.4.1
mkdir build
cd build
cmake ..
make -j2
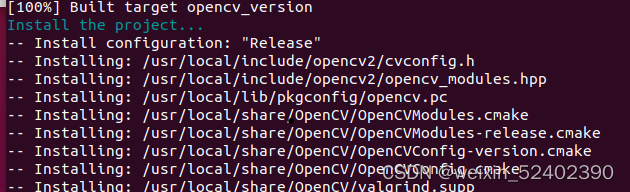
sudo make install
// Configure the compilation environment
sudo gedit /etc/ld.so.conf.d/opencv.conf
/usr/local/lib
sudo ldconfig
sudo gedit /etc/bash.bashrc
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
source /etc/bash.bashrc
sudo updatedb
The execution process is as follows :
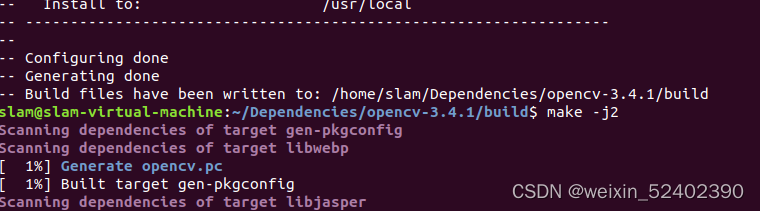
Compile successfully 
install
Configure the compilation environment

5.4 install G2O
Download the installation package as above , Then install them according to the dependencies provided by the official
// Install dependencies
sudo apt-get install libsuitesparse-dev
sudo apt-get install qtdeclarative5-dev
sudo apt-get install qt5-qmake
sudo apt-get install libqglviewer-dev-qt5
// Unzip the installation package
tar -zxvf g2o-20170730_git.tar.gz
cd g2o-20170730_git/
// install
mkdir build
cd build
cmake ..
make
Compile successfully .

5.5 install DBow2
Also download the installation package first , Then compile
tar -zxvf DBoW2-1.1-free.tar.gz
cd DBoW2-1.1-free/
mkdir build
cd build
cmake ..
make -j2
sudo make installThe execution process is as follows

5.6 install Ros1
Ros Install and use One click installation series of Xiaoyu | Fish fragrance ROS (fishros.org.cn)
One step in place , Don't say more .
6 install ORBSLAM2
newly build ros working space , stay ros Download the source code in the workspace
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2

Set up build.sh File permissions
chmod +x build.sh
compile
./build.sh
make -j2Download the dataset test after success , The running code is as follows ( Be careful : Different data sets correspond to different configuration files )
// Executable file path Dictionary path Profile path Dataset path
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/slam/Data/rgbd_dataset_freiburg1_xyz
The successful running

Two . Problem summary
1.Pangolin Times wrong :‘No package ‘xkbcommon’ found’
2.error: ‘usleep’ was not declared in this scope usleep(5000);
3.collect2:error:id returued 1exit status
problem 1~3 Solutions for :(45 Bar message ) Ubuntu18.04 ORB_SLAM2 Installation 、 To configure 、 function SLAM Monocular instance _ Junqin's blog -CSDN Blog
4. Eigen relevant
Build type: Debug
CMake Error at CMakeLists.txt:45 (find_package):
Found package configuration file:
/usr/local/lib/cmake/Pangolin/PangolinConfig.cmake
but it set Pangolin_FOUND to FALSE so package "Pangolin" is considered to
be NOT FOUND. Reason given by package:
Pangolin could not be found because dependency Eigen3 could not be found.
5.fatal error:Eigen/Core: There is no file or directory #include<Eigen/Core>

resolvent : Pangolin Version of the problem , Replace Pangolin edition
6. install cimpiler error:killed(program cciplus)
resolvent : Shut down and restart
7. other
I haven't encountered any other problems , You can refer to the above two articles .
Reference material :
 https://blog.csdn.net/weixin_43374723/article/details/84064644?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165182929616781683930040%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=165182929616781683930040&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-84064644-null-null.142%5Ev9%5Epc_search_result_cache,157%5Ev4%5Econtrol&utm_term=ubuntu%E9%85%8D%E7%BD%AEc%2B%2B%E7%8E%AF%E5%A2%83&spm=1018.2226.3001.4187
https://blog.csdn.net/weixin_43374723/article/details/84064644?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165182929616781683930040%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=165182929616781683930040&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-84064644-null-null.142%5Ev9%5Epc_search_result_cache,157%5Ev4%5Econtrol&utm_term=ubuntu%E9%85%8D%E7%BD%AEc%2B%2B%E7%8E%AF%E5%A2%83&spm=1018.2226.3001.4187边栏推荐
- Parameter passing mode of C language (int x) (int *x) (int & x)
- What is Cartland number? What are the applications?
- Virtual machines use host graphics cards (Hyper-V and wsl2)
- Visual Studio
- 网络安全(5)
- How to realize the isolation level between MySQL transactions and mvcc
- dataframe. to_ Sql() inserts too many errors at one time
- 怎么样的框架对于开发者是友好的?
- Source code analysis of senparc.weixin.sample.mp
- 《UnityShader入门精要》总结(2):初级篇
猜你喜欢

C# 值类型和引用类型讲解

数仓项目踩坑记录与解决方法总结

Nucleic acid scanning code registration experience (how to improve the correct character recognition rate of OCR)

node(二)

Zhongang Mining: four steps for sustainable and healthy development of fluorite industry

深入浅出依赖注入及其在抖音直播中的应用

View port occupancy

SiC Power Semiconductor Industry Summit Forum successfully held

Basic operations of OpenCV image processing

【AAAI】用于交通流预测的基于注意力的时空图卷积网络
随机推荐
div水平布局两边对齐
Network security (6)
Use cpolar to publish raspberry pie web pages (improvement of cpolar tunnel)
How to contribute to openharmony
Appendix 2 – some simple exercises
数仓项目踩坑记录与解决方法总结
On contract testing
Unity xchart3.0 basic usage quick start
一知半解 ~题目杂记 ~ 一个多态问题
Will the modified data be updated when it is the same as the original data?
Nucleic acid scanning code registration experience (how to improve the correct character recognition rate of OCR)
Briefly describe the difference between heap and stack
How to query express logistics and filter out no information doc No. to delete or copy
SiC功率半导体产业高峰论坛成功举办
Dynamics 365Online 如何自定义商机关闭窗体
待人宽容大度
Commonly used DOS commands [gradually improved]
开放原子开源基金会黄金捐赠人优博讯携手合作伙伴,助力OpenHarmony破圈!
【微信小程序】接口生成自定义首页二维码
Sublime Text3 设置不同文件不同缩进