当前位置:网站首页>[example of URDF exercise based on ROS] use of four wheeled robot and camera
[example of URDF exercise based on ROS] use of four wheeled robot and camera
2022-07-24 09:02:00 【Life is like Zhaoxu】
Preface
In the last blog section, we systematically learned about URDF The basic usage syntax of , And from the label 、 attribute 、 I have deeply experienced the structural relationship and other aspects URDF The framework and concept of the document , This article focuses on Actual simulation development , Examples are analyzed from cuboid and four-wheel cylindrical robots with cameras , Finally, some applicable development tools are given , Help you understand URDF How to use files .
One 、 Rotating Cameras
1. Target robot model
demand : The chassis is a cuboid 、 There is one in front that can go along Z Camera with free rotation axis
URDF File code :
<!-- demand : The chassis is a cuboid 、 There is one in front that can go along Z Camera with free rotation axis Robot model of -->
<robot name="mycar">
<!-- chassis -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- camera -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- The joints -->
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<!-- You need to calculate two link The offset between the physical centers of -->
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
2. Startup file
- Pay attention to item : A status publishing node must be created , Secondly, joint motion control nodes are used to test joint motion , And generate UI
<launch>
<param name="robot_description" textfile="$(find urdf_rviz_demo)/urdf/urdf/urdf03_joint.urdf" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf_rviz_demo)/config/helloworld.rviz" />
<!-- Add joint status publishing node -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- Add robot status publishing node -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<!-- Optional : The node used to control joint motion -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
</launch>
3. Problems and optimization methods
1) Initial model location
problem : The robot model generated by the above code will Half sunk to the ground
reason : The center of gravity of the chassis is located at the origin of the map
resolvent : Set the initial link Set to a very small size link( For example, the radius is 0.001m The sphere of , Or the side length is 0.001m The cube ), Then at the beginning link Add rigid bodies such as chassis on
Optimize the code :
<!-- Use base_footprint Optimize -->
<robot name="mycar">
<!-- Set an origin ( Projection of robot Center ) -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<!-- Add chassis -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- The joint between the chassis and the origin -->
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 0.05" />
</joint>
<!-- Add Cameras -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- The joints -->
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
2) Command line error
- The error message is as follows :
UnicodeEncodeError: 'ascii' codec can't encode characters in position 463-464: ordinal not in range(128) [joint_state_publisher-3] process has died [pid 4443, exit code 1, cmd /opt/ros/melodic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/rosmelodic/.ros/log/b38967c0-0acb-11eb-aee3-0800278ee10c/joint_state_publisher-3.log]. log file: /home/rosmelodic/.ros/log/b38967c0-0acb-11eb-aee3-0800278ee10c/joint_state_publisher-3*.logresolvent : Remove Chinese comments , Avoid coding problems
- The error message is as follows :
[ERROR] [1584370263.037038]: Could not find the GUI, install the ‘joint_state_publisher_gui’ packageresolvent :
sudo apt install ros-noetic-joint-state-publisher-gui
Two 、 Four wheeled cylindrical robot
1. Target robot model
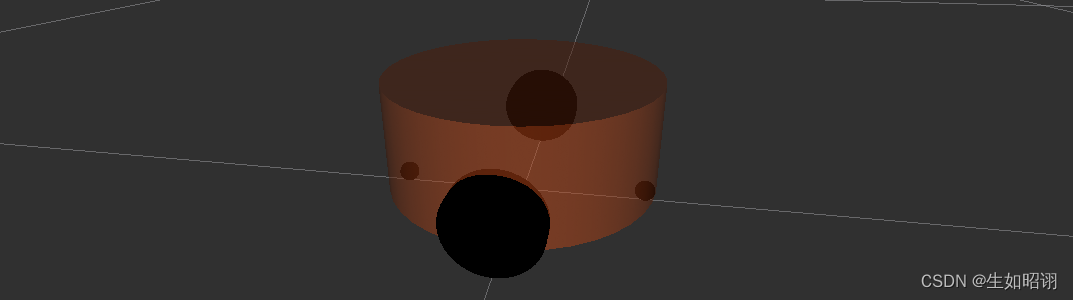
- demand : The chassis is a cylinder , The four wheels are two driving wheels , Two supporting wheels
- Specific data and diagram :
1. chassis : radius 10cm、 high 8cm, Distance from the ground 1.5cm
2. wheel : Driving wheel : radius 3.25cm、 wide 1.5cm; Supporting wheel : spherical , radius 0.75cm
- URDF File code :
<robot name="mycar">
<!-- Set up base_footprint -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<!-- Add chassis -->
<!-- Parameters shape : Cylinder radius :10 cm Height :8 cm Off the ground :1.5 cm -->
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.8 0.3 0.1 0.5" />
</material>
</visual>
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link"/>
<origin xyz="0 0 0.055" />
</joint>
<!-- Add drive wheels -->
<!-- The driving wheel is a overturned cylinder Parameters radius : 3.25 cm Width : 1.5 cm Color : black Joint settings : x = 0 y = The radius of the chassis + Tire width / 2 z = Distance from the ground + Chassis length / 2 - Tire radius = 1.5 + 4 - 3.25 = 2.25(cm) axis = 0 1 0 -->
<link name="left_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5705 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="left_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="left_wheel" />
<origin xyz="0 0.1 -0.0225" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5705 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="right_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="right_wheel" />
<origin xyz="0 -0.1 -0.0225" />
<axis xyz="0 1 0" />
</joint>
<!-- Add Cardan wheel ( Supporting wheel ) -->
<!-- Parameters shape : sphere radius : 0.75 cm Color : black Joint settings : x = Customize ( Chassis radius - Radius of universal wheel ) = 0.1 - 0.0075 = 0.0925(cm) y = 0 z = Chassis length / 2 + Distance from the ground / 2 = 0.08 / 2 + 0.015 / 2 = 0.0475 axis= 1 1 1 -->
<link name="front_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="front_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="front_wheel" />
<origin xyz="0.0925 0 -0.0475" />
<axis xyz="1 1 1" />
</joint>
<link name="back_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="back_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="back_wheel" />
<origin xyz="-0.0925 0 -0.0475" />
<axis xyz="1 1 1" />
</joint>
</robot>
2. Startup file
- launch File code :
<launch>
<!-- take urdf The file content is set into the parameter server -->
<param name="robot_description" textfile="$(find demo01_urdf_helloworld)/urdf/urdf/test.urdf" />
<!-- start-up rivz -->
<node pkg="rviz" type="rviz" name="rviz_test" args="-d $(find demo01_urdf_helloworld)/config/helloworld.rviz" />
<!-- Start the robot state and joint state publishing node -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- Start the graphical control joint motion node -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
</launch>
- Implementation process : This robot can first create a basic URDF file , After integrating the startup file, gradually add components such as chassis and wheels
3、 ... and 、URDF Authoring tool
1. Syntax check check_urdf
- Tool installation :
sudo apt install liburdfdom-tools
Specific tools :check_urdf, Check for complex urdf Whether there are syntax problems in the file
Usage method : Enter the corresponding directory , Use command
check_urdf Corresponding urdf fileEffect indication :

2. Look at the structure urdf_to_graphiz
Tool installation : ditto
Specific tools :urdf_to_graphiz, see urdf Model structure , Show different link The hierarchy of
Usage method : Enter the corresponding directory , Use command
urdf_to_graphiz Corresponding urdf file, View... In the current directory PDF File canEffect indication :

summary
- Statement : The blog section of this section refers to CSDN User zhaoxuzuo ROS course , This blog mainly introduces two uses URDF Specific examples of robot modeling , One is the free rotation camera , The other is a four wheeled robot , Finally, it gives URDF Some of the basics of ROS Tools , Contains syntax error checking and link Structure display, etc , The next blog will introduce how to use Xacro Yes URDF Program optimization , Coming soon .

边栏推荐
- Tiktok's "online celebrity" was poached by Amazon and broadcast on Amazon live platform
- C语言练习题目+答案:
- [translation] integration challenges in microservice architecture using grpc and rest
- 面试官:哥们Go语言的读写锁了解多少?
- Run little turtle to test whether the ROS environment in the virtual machine is complete
- [FFH] websocket practice of real-time chat room
- Virtual machine terminator terminal terminator installation tutorial
- 【翻译】使用gRPC和REST的微服务架构中的集成挑战
- Unity C tool class arrayhelper
- How RPC callers implement asynchronous calls: completable future
猜你喜欢
Houdini 官方HDA SideFX Labs 安装

面试官:哥们Go语言的读写锁了解多少?

TiFlash 源码阅读(五) DeltaTree 存储引擎设计及实现分析 - Part 2

Houdini 笔记
![[translation] integration challenges in microservice architecture using grpc and rest](/img/88/53f4c2061b538b3201475ba51449ff.jpg)
[translation] integration challenges in microservice architecture using grpc and rest

脉脉网友出了道 Go 面试题,你能答对吗?

超全总结:Go语言如何操作文件

Why is TCP a triple handshake

After two days of tossing and turning, I finally wrote my first fluent app, which almost tortured me into a nervous breakdown
RPC中实现提供者信息变化后通知消费者
随机推荐
如何将CAD文件导入图新地球中,与影像地形倾斜模型准确叠加
Rank 3 and count from 0 to 9. How many times does each number appear in total, and how many times does each number appear in the tens of hundreds,
Rocky基础-Shell脚本基础知识
RPC中实现提供者信息变化后通知消费者
Using OpenCV to do a simple face recognition
[Shangshui Shuo series] final rad New Literacies
Xiaobai learns Jenkins - installation and quick start
【一起上水硕系列】一起提前看看July课程
链表——24. 两两交换链表中的节点
Porting boa server on imx6ull
Seven data show the impact of tiktok's combination of payment and organic content
After two days of tossing and turning, I finally wrote my first fluent app, which almost tortured me into a nervous breakdown
How to open the port number of the server, and the corresponding port of common network services
利用opencv 做一个简单的人脸识别
[FFH] openharmony gnawing paper growth plan -- Application of cjson in traditional c/s model
Tiktok live broadcast with goods marketing play
Tiktok video traffic golden release time
Taking advantage of the momentum, oceanbase promotes the lean growth of digital payment
Un7.22: how to upload videos and pictures simultaneously with the ruoyi framework in idea and vs Code?
[translation] integration challenges in microservice architecture using grpc and rest