当前位置:网站首页>Quick completion guide for mechanical arm (zero): main contents and analysis methods of the guide
Quick completion guide for mechanical arm (zero): main contents and analysis methods of the guide
2022-06-24 10:32:00 【Lie on me】
Directory :
Quick completion guide of mechanical arm ( zero ): Main contents and analysis methods of the guide
Quick completion guide of mechanical arm ( One ): The development of manipulator
Quick completion guide of mechanical arm ( Two ): Application of mechanical arm

Write it at the front :
- This guide is for me ( Automation major of a third rate University ) Experience summary of , So the content must be simple , Maybe it's easy to understand . I hope these articles can help you to enter the manipulator faster 🦾 The world of , If we can develop Punch Germany KUKA Kick Switzerland ABB Robot arm , So much the better ;
- The content revolves around the six degree of freedom manipulator ;
- Suitable for beginners of mechanical arm ️、 Students who want to participate in the National University Biological Networking Design Competition ;
- Main reference books :John J.Craig By 《 Introduction to Robotics 》、Christian Siriano Et al. 《 Robotics modeling 、 Planning and control 》;
- Recommend online classes : Taida (NTU) Professor linpeiqun 🧑 Robotics ,PPT It's also very easy to use ;
- Want to use arduino( Lower machine )、matlab( For simulation )、python( Write the upper computer , I use it vscode)、geogebra( For drawing , Convenient for theoretical analysis )、xmind( To make a flow chart ).
One 、 Main contents of the guide
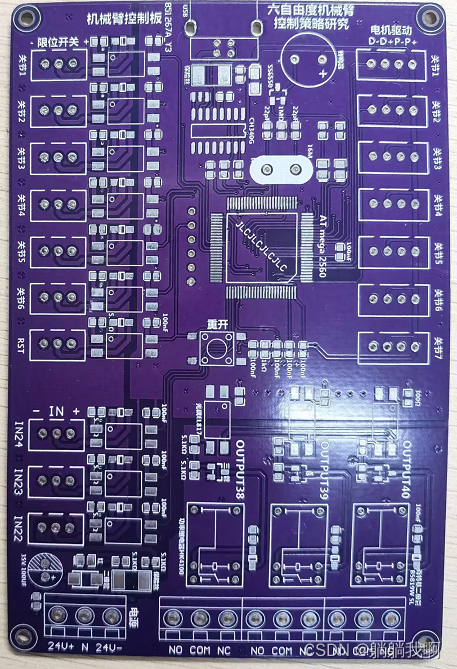
1、 hardware system
Matter is the carrier of all appearances , To learn mechanical arm , Obviously, we need to know what is needed to control the manipulator :
- connecting rod —— It's your arm 🦾
- The joints —— Just like your joints
- End actuators —— Equivalent to your hand ️, It is installed at the end of the mechanical arm , Clamping claw 、 Suction cups and so on
- The motor —— For driving joints
- Lower machine —— Single chip microcomputer , You have to use it to tell the robot how to move
- Motor drive —— Control the mechanical arm together with the single chip microcomputer
- retarder —— Increase the torque of the motor , Give it a lift
- Transmission mechanism —— Hinge 、 gear 、 Screw and so on
- Encoder —— Check the rotation of the manipulator joint , For closed-loop control
- Limit switch —— It can be used to calibrate the manipulator
- brake —— It is used to lock the lower joint in case of power failure , Prevent the mechanical arm from being injured
- DC regulated power supply —— Supply power to the manipulator and the lower computer
- Love for robotic arms ️—— This is the top priority

2. Kinematic analysis
The movement of the mechanical arm Learning can be said to be The most critical content 了 . Think of the whole body of the manipulator as anus rigid body , Through kinematic analysis , It can rotate the angle through the joint of the manipulator ( For rotating joints ) Get where the end is 、 Towards where ( Postures ), You can also use the mechanical arm where it is 、 Towards where ( Postures ) Get the rotation angle of the manipulator joint ( For rotating joints ).
The main contents of manipulator kinematics include the use of standards DH Method to complete the kinematics modeling of the manipulator 、 Forward kinematics solution 、 Inverse kinematics solution 、 Solution of reachable workspace .
3. Trajectory planning
The end of the mechanical arm is from A Move to B A point must leave a path of motion in space , We call the relationship between path and time as trajectory . We definitely want the manipulator to move along the desired trajectory , So trajectory planning came into being .
This guide describes 5 A simple and practical trajectory planning method , No, A* Algorithm 、B Spline 、NURBS Something like that , Not to mention deep learning ...
Two 、 Guide the analysis method
1. The theoretical analysis
Theoretical analysis is definitely necessary , There are Many, many, many matrix operations .

2. Computer simulation
We don't have the condition to measure the motion state of each joint of the manipulator ,solidworks Modeling is not very good , not so bad matlab Are there in RTB The tool box saved me from fire and water , Kinematic modeling and analysis 、 It can be used for trajectory planning .🪄
3. The practical application
It's a mule or a horse that has to be pulled out for a stroll . Write the corresponding program to the upper computer ( Responsible for calculation ) And the lower computer ( Responsible for controlling the motor 、 Limit switch 、 brake ) in , And use AE Track the trajectory it actually leaves in space .
notes :AE The usage is explained in another article of mine .《 Use AE(After Effects) Describe the moving path of an object ( A little tracking )》 https://blog.csdn.net/m0_53966219/article/details/124682733?spm=1001.2014.3001.550
https://blog.csdn.net/m0_53966219/article/details/124682733?spm=1001.2014.3001.550
meanwhile , Referring to the national standard, I designed a method to use two dial indicators to detect the repeated positioning accuracy of the manipulator ( Relatively rough ), The purpose is Quantify the control effect of the manipulator , This is still very important .
I choose to use two dial indicators for measurement because I have enough money to buy two .

边栏推荐
- 88.合并有序数组
- 分布式系统你必须了解的点-CAP
- 进程与多线程
- numpy.logical_or
- 线程的 sleep() 方法与 wait() 方法的区别
- Leetcode-1089: replication zero
- JMeter接口测试工具基础— 取样器sampler(二)
- [ei sharing] the 6th International Conference on ship, ocean and Maritime Engineering in 2022 (naome 2022)
- Uniapp develops a wechat applet to display the map function, and click it to open Gaode or Tencent map.
- 学习使用phpstripslashe函数去除反斜杠
猜你喜欢

Machine learning perceptron and k-nearest neighbor
![Illustration miscellaneous [for archiving to prevent loss]](/img/cf/bf48bfda020a3c8690339a388efc5d.png)
Illustration miscellaneous [for archiving to prevent loss]

JMeter接口测试工具基础— 取样器sampler(二)
1. project environment construction

SQL Server AVG function rounding

【资源分享】2022年环境工程与生物技术国际会议(CoEEB 2022)

【Energy Reports期刊发表】2022年能源与环境工程国际会议(CFEEE 2022)

消息队列的作用
JMeter interface test tool foundation - sampler (II)
How can I solve the problem that the swiper animation animation fails when switching between left and right rotations of the swiper?
随机推荐
6.套餐管理业务开发
机械臂速成小指南(二):机械臂的应用
Younger sister Juan takes you to learn JDBC --- 2-day sprint Day1
分布式系统你必须了解的点-CAP
【IEEE出版】2022年工业自动化,机器人与控制工程国际会议(IARCE 2022)
How to use multiple kindeditor editors on a page and pass values to the server
机械臂速成小指南(一):机械臂发展概况
[IEEE publication] 2022 International Conference on industrial automation, robotics and Control Engineering (iarce 2022)
tf. errors
图解杂项【防止丢失进行存档用的】
包装类型的缓存机制
leetCode-1823: 找出游戏的获胜者
用扫描的方法分发书稿校样
26.删除有序数组的重复项
charles抓包工具使用教程
A method to solve the self-adaptive width and height of the internal picture of rich text label in wechat applet
百度网盘下载一直请求中问题解决
学习使用KindEditor富文本编辑器,点击上传图片遮罩太大或白屏解决方案
Using pandas to read SQL server data table
Safety and food security for teachers and students of the trapped Yingxi middle school