当前位置:网站首页>Matlab【路径规划】—— 无人机药品配送路线最优化
Matlab【路径规划】—— 无人机药品配送路线最优化
2022-06-12 23:46:00 【鹅毛在路上了】
问题描述
某市引进一架专业大型无人机用于紧急状态下的药品投递。已知该市设有25处可用于在紧急状态接纳病人的医疗机构。其地理位置坐标(单位为公理)如下图所示。具体数据及可容纳病人数量见附件1。现要求通过数学建模,提供药品紧急配送策略,具体问题如下:
已知该市唯一的药品仓库兼设在地理位置x,y坐标分别为(82,55)的医疗机构内部,请制订无人机的飞行路线,使尽可能多的病人尽早得到救治。


上图为医疗机构及病人数量分布
题目假设:建模过程不考虑其他运载工具,也不考虑无人机的续航能力、巡航时间及承载容量限制。
具体思路
由题目给出的条件和附件数据(见文末),根据demo1计算出各节点之间的直线距离(假设直升机最短路线就是走直线);并根据demo2进行一个简单的数学建模,实现无人机配送的路径规划——通过调整目标函数中的权重系数obj_weight,获得不同的路线方案,并以累计路径最短、优先救治病人最多作为优化目标,通过demo3的优化算法给出最优解。
demo1:求解所有节点间的距离

上图为添加了各医疗机构病人数量的重制地图,黄色节点为兼设药品仓库的医疗机构。
数据准备:
需要根据已有的数据,根据demo1将横纵坐标,全连接节点标号,计算出的距离值绘制成数据集dist_A
clc,clear,close all;
load data_all
%%求解所有节点间的距离
x_1 = [data_all(:,1),data_all(:,2),data_all(:,3)]; %节点标号,x坐标、y坐标
dist_A = zeros(25*25,7); %用于存放计算出的距离矩阵
count = 1;
for i = 1:25
for j = 1:25
dist_A(j+25*(i-1),1) = count; %第一列
dist_A(j+25*(i-1),2) = data_all(i,2); %起点x坐标
dist_A(j+25*(i-1),3) = data_all(i,3); %起点y坐标
dist_A(j+25*(i-1),4) = j; %第四列
dist_A(j+25*(i-1),5) = data_all(j,2); %终点x坐标
dist_A(j+25*(i-1),6) = data_all(j,3); %终点y坐标
dist_A(j+25*(i-1),7) = sqrt((dist_A(j+25*(i-1),2)- ...
dist_A(j+25*(i-1),5))^2+(dist_A(j+25*(i-1),3)-dist_A(j+25*(i-1),6))^2);
end
count = count+1;
end
save dist_A dist_A
求解出的距离矩阵dist_A——第1列为起点标号,第2、3列为起点x,y坐标,第4列为起点标号,第5、6列为起点x,y坐标,第7列为各节点之间的距离值(单位为公理):
有了具体的距离值dist_A(:,7)和每个站点的病人数量x_2(题目附件数据已给),就可建立一个简单的目标函数,求出每一步路径规划依赖的指标——决策参数 L o b j − t r k \mathcal{L}_{obj-trk} Lobj−trk:
L o b j − t r k ( i ) = 1 o b j − w e i g h t ⋅ x 2 ( i ) + m a x ( d i s t A ( 25 ∗ ( i − 1 ) + 1 : 25 ∗ ( i − 1 ) + 25 , 7 ) ) − d i s t A ( 25 ∗ ( i − 1 ) + j , 7 ) \mathcal{L}_{obj-trk{(i)}}=\frac{1}{obj_{-}weight}·x_2(i)+max(distA_{(25*(i-1)+1:25*(i-1)+25,7)})-distA_{(25*(i-1)+j,7)} Lobj−trk(i)=obj−weight1⋅x2(i)+max(distA(25∗(i−1)+1:25∗(i−1)+25,7))−distA(25∗(i−1)+j,7)
优先将决策参数 L o b j − t r k \mathcal{L}_{obj-trk} Lobj−trk值较大的所对应的节点标号作为下一个预测配送点;
权重系数 o b j − w e i g h t obj_{-}weight obj−weight值越大,则说明最短距离对路径规划的影响越大,反之病人数量的影响越大;
迭代计算过程中若遇到自身节点,则将 L o b j − t r k \mathcal{L}_{obj-trk} Lobj−trk置为0——表示一轮计算中(如节点1对应节点1-25为第一轮,节点2对应节点1-25为第二轮…),无人机不重复配送同一站点;实际上,程序中还需加以条件判断是否在前往上一轮已经配送过的站点,并限制重复配送(见demo2),否则会出现两个站点间“反复横跳”的奇葩现象;
依据 L o b j − t r k \mathcal{L}_{obj-trk} Lobj−trk每一轮预测出一个配送目标站点,下一轮中再将配送过的站点排除,以此类推,得出配送站点的规划顺序,其大致过程如下图所示:
demo2:直升机配送路线规划算法
%计算决策指标
obj_trk = zeros(625,1); %决策指标初始化
obj_weight = 30; %设置影响决策的权重——值越大,最短距离影响越大,反之病人数量影响越大
for i = 1:25
for j = 1:25
if dist_A(25*(i-1)+j,7) ~= 0
obj_trk(25*(i-1)+j,1) = x_2(j,1)/obj_weight + ...
(max(dist_A(25*(i-1)+1:25*(i-1)+25,7)-dist_A(25*(i-1)+j,7)));
else
obj_trk(25*(i-1)+j,1) = 0;
end
end
end
save obj_trk obj_trk
%根据决策指标从起点25开始规划路线
%%寻找无人机配送路线规划算法(具体代码见函数way_back)
obj_index = way_back(obj_weight,obj_trk,25,25); %输入参数依次为权重系数、决策指标、节点个数
save obj_index obj_index
%%寻找无人机配送路线规划算法
function obj_index = way_back(obj_trk,n,num1)
%输入参数为决策指标、节点个数、起点标号
obj_index = [num1;zeros(n-1,1)];
step = n;
for i = 2:n
temp = find(obj_index(1:i-1)==step, 1); %是否为配送过的站点
if isempty(temp) || i == 2 || i == 3
[value,obj_index(i)] = max(obj_trk(n*(step-1)+1:n*(step-1)+n,1));
step = obj_index(i);
else
%以前配送过就再寻找下一个更合适的决策点
temp = find(obj_index(1:i-1)==step);
if size(temp) == [0,1]
tk = 1;
elseif size(temp) == [0,0]
tk = 1;
else
tk = 0;
end
if tk && isempty(temp)
sort_obj = sort(obj_trk(n*(obj_index(i-1)-1)+1:n*(obj_index(i-1)-1)+n,1), 'descend'); %降序排列
disp("已规划第"+num2str(i)+"个配送点")
obj_temp = find(obj_trk(n*(obj_index(i-1)-1)+1:n*(obj_index(i-1)-1)+n,1)==sort_obj(2));
obj_index(i) = obj_temp(1);
step = obj_index(i);
else
sort_obj = sort(obj_trk(n*(obj_index(i-1)-1)+1:n*(obj_index(i-1)-1)+n,1), 'descend');
disp("已规划第"+num2str(i)+"个配送点")
for k = 2:n
obj_temp = find(obj_trk(n*(obj_index(i-1)-1)+1:n*(obj_index(i-1)-1)+n,1)==sort_obj(k));
obj_index(i) = obj_temp(1);
step = obj_index(i);
temp2 = find(obj_index(1:i-1)==step);
if size(temp2) == [0,1]
tk2 = 1;
elseif size(temp2) == [0,0]
tk2 = 1;
else
tk2 = 0;
end
if tk2 && isempty(temp2) %是否为已配送过的站点
break
else
continue
end
end
end
end
end
obj_index(n+1) = n; %配送完毕返回起点
end
权重系数 o b j − w e i g h t = 30 obj_{-}weight=30 obj−weight=30时,计算出的决策参数 L o b j − t r k \mathcal{L}_{obj-trk} Lobj−trk:
 同样是25个数为一轮(以dist_A中的节点对应关系共计25*25=625个元素),每一轮中自身节点对应的参数值都为0,其余为按目标函数的算法计算;
同样是25个数为一轮(以dist_A中的节点对应关系共计25*25=625个元素),每一轮中自身节点对应的参数值都为0,其余为按目标函数的算法计算; 权重系数 o b j − w e i g h t = 30 obj_{-}weight=30 obj−weight=30时,规划出的路线 o b j − i n d e x obj_{-}index obj−index:

按照不同权重系数规划出的路线:



其中, o b j − w e i g h t = 30 obj_{-}weight=30 obj−weight=30时还是比较符合现实生活中直升机、无人机飞行的巡航盘旋机制,其余按最短距离与优先救治病人数量折衷决策规划:

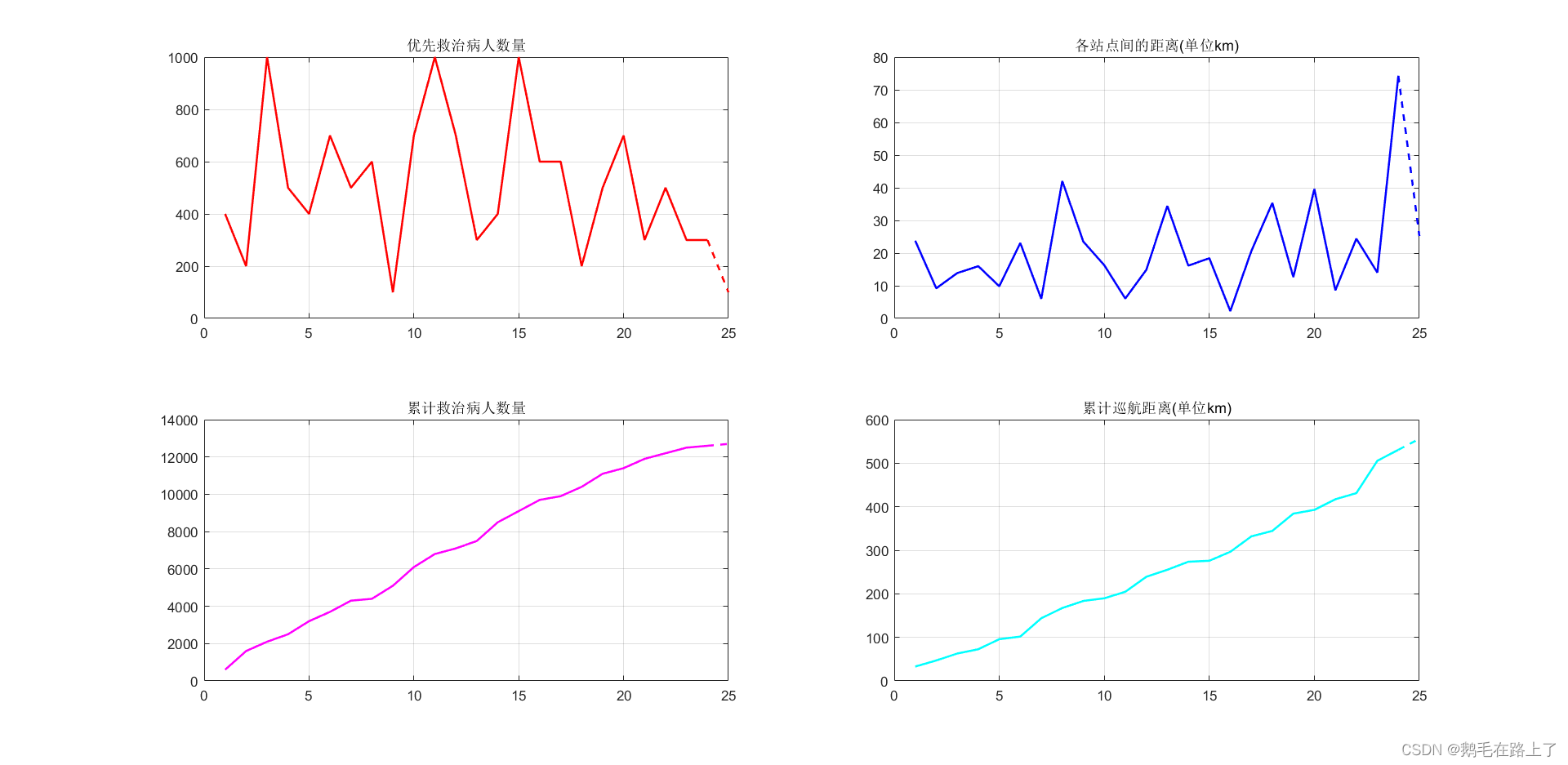
o b j − w e i g h t = 30 obj_{-}weight=30 obj−weight=30时,计算出的飞行路线评价指标:
demo3:寻找最优解的优化算法
由于累计救治病人数量的初值和终值保持不变,故可通过拉格朗日中值定理确定一个导数 f ′ ( ξ ) f'(\xi) f′(ξ),我们希望 ξ \xi ξ出现得越早越好(越早说明优先救治病人数量越多),再结合优先选择总飞行距离最短的,组合成一个新的最优参数向量best_index,并返回其最小值best_weight(best_index值越小越符合最优解所需的权重):
%%代码片展示:
obj_weight = 1:100; 定义权重范围
for...
%拉格朗日中值定理确定变化率
a = 1; b = length(pat_indexs);
fa = pat_indexs(1,1);
fb = pat_indexs(b,1);
fc = (fb-fa)/(b-a);
%对累计优先救治病人数量进行插值,使其连续化
step = 0.01;
x1 = a:step:b;
pat_indexs_1 = interp1(a:b,pat_indexs,x1,'spline');
ff = diff(pat_indexs_1)/step; %求一阶导
[~,p_y] = min(abs(ff-fc)); %找到最接近中值fc的数值横坐标
best_index(index,1) = floor(p_y/length(x1)) + dist_dxs(25,1)/600; %归一化后构建新指标
end
[f_x,~] = find(best_index == min(best_index), 1);
best_weight = f_x;
分以下两种情况求得最优解:
飞行路线总距离包含返航路线在内
best_weight = 23,最优解飞行路线及观测参数如下:

飞行路线总距离不包含返航路线:
best_weight = 24,最优解飞行路线如下:
支撑材料&工程附件
附件脚本可直接运行:
Matlab【路径规划】—— 无人机药品配送路线最优化
【注意】:本程序全部在Matlab 2022a中编写,编码格式为"UTF-8",为保障流畅体验,建议使用2019a及以上版本打开!
边栏推荐
- Deep feature synthesis and genetic feature generation, comparison of two automatic feature generation strategies
- Theory + practice will help you master the dynamic programming method
- CV - baseline summary (development history from alexnet to senet)
- Summary of individual NLP internship experience
- Industry reshuffle, a large number of programmers are going to lose their jobs? How can we break the current workplace dilemma
- Find out the data that can match the keyword key in field 1 or field 2 in the database table. If you want to display the matching data in field 1 first
- Save state when viewpager is used with fragment fragmentpageradapter
- Test platform series (97) perfect the case part
- 2022年6月11日记:王老师的春天,混入
- 同花顺开证券账户怎么样?到底安不安全呢
猜你喜欢

妙才周刊 - 5
![Buuctf-[ciscn 2019 preliminary]love math](/img/56/dbe7fc1d5a55551153e3df39810856.jpg)
Buuctf-[ciscn 2019 preliminary]love math

Model over fitting - solution (II): dropout
![[opencv learning] small ticket recognition based on perspective transformation and OCR recognition](/img/47/08b9dd9dbea9e9cb6deda975f4d652.jpg)
[opencv learning] small ticket recognition based on perspective transformation and OCR recognition

2022年G3锅炉水处理考题模拟考试平台操作

36 krypton's debut | "osogena" won nearly ten million angel rounds of financing. The original DLR scientists of German Aerospace Research and development system modeling and simulation CAE software PA

Tableau
![[literature translation - Part] revealing the structure of clinical EEG signals by self supervised learning (SSL and RP principles / data / preprocessing)](/img/6f/890bfa8c2928712fecc6560c72bad9.jpg)
[literature translation - Part] revealing the structure of clinical EEG signals by self supervised learning (SSL and RP principles / data / preprocessing)

Zhengzhou University of light industry -- development and sharing of harmonyos pet health system
![Software development tools [3] theoretical basis of software development tools](/img/24/6a3c593931523ceb17e323bc0367b4.jpg)
Software development tools [3] theoretical basis of software development tools
随机推荐
设计消息队列存储信息数据的MySQL表结构
Hongmeng starts
Unprecedented analysis of Milvus source code architecture
dict和set的基本操作
How to package a colorpicker component for color selection?
华为云会议初体验【华为云至简致远】
Tsinghua University image source will cause tensorflow GPU installation failure
21 Chundong University blasting safety online peacetime operation 123 [standard answer]
CV—BaseLine总结(从AlexNet到SENet的发展历程)
Record 5 - the serial port of stm32f411ceu6 realizes the sending and receiving of fixed length data and variable length data
Dry goods sharing | BitSet application details
Based on three JS offshore wind power digital twin 3D effect
Model over fitting - solution (II): dropout
cookie
For product managers, which of the two certificates, PMP and NPDP, is more authoritative?
How to publish OSM maps locally and customize the mapping
Basic operations of dict and set
Hongmeng starts 2
How to use Huawei cloud disaster tolerance solution to replace disaster recovery all-in-one machine
How SAP ui5 uses manifest JSON file defines third-party library dependencies