当前位置:网站首页>Motion capture system for end-positioning control of flexible manipulators
Motion capture system for end-positioning control of flexible manipulators
2022-07-31 13:55:00 【MocapLeader】
The flexible robotic arm is a new type of bionic robotic arm whose design is inspired by biological structures found in nature, such as elephant trunks, octopus claws, earthworms and snakes.Compared with traditional manipulators, flexible manipulators can bend any shape within the range of material deformation, and have strong adaptability to work in narrow and complex spaces by adjusting their shape.
Flexible robotic arms are often used in medical surgery, space rescue, equipment maintenance and other fields.In these scenarios, the operation accuracy of the end of the flexible manipulator is very high, but most researches focus on improving the repetitive positioning accuracy of the end control, ignoring the control error during the end trajectory tracking process, and the dynamic model of the flexible arm is difficult to be accurate.Establish.
Researchers from the School of Electrical Engineering of Sichuan University designed a rigid-flexible coupled wire-driven flexible manipulator. Through the analysis of the motion mechanism of the flexible manipulator, they designed a control scheme for the end positioning of the flexible manipulator based on the inverse dynamics model., and carried out simulation and physical prototype terminal positioning control experiments.
The physical prototype of the flexible manipulator is composed of the manipulator body, the driving device and the electric control system. The driving device drives the slide table to move through the motor and pulls the driving line to complete the motion control of the manipulator body.In order to accurately record the change data of the end position during the movement of the flexible manipulator, the researchers arranged the NOKOV metric optical motion capture system above the manipulator body, and placed a reflective marker ball at the end of the flexible arm, and used the motion capture camera to track the acquisition.Real-time data on end positions.In the experiment, the positioning accuracy of NOKOV metric motion capture system reaches sub-millimeter level.

The researchers compared the ideal trajectory with the simulated trajectory and the actual trajectory (collected by the NOKOV metric motion capture system), and analyzed the reasons for the errors of the physical prototype.The experimental results show the effectiveness of the end-positioning control algorithm based on the inverse dynamics model.

References:[1]Ma Congjun, Zhao Tao, Xiang Guofei, Ren Jiangtao, Chen Yuanke, Tsun Songyi. Based on inverse kinematicsPositioning control of the end of a flexible manipulator[J].Chinese Journal of Mechanical Engineering,2021,57(13):163-171.
Read more:
Robot Spatial Positioning Pose | NOKOV Metric Motion CaptureNOKOV MetricMotion capture can provide high-precision six-degree-of-freedom kinematic data to achieve precise positioning of the robotic arm https://www.nokov.com/motion-capture-robotic-arm.htmlClassic Case | NOKOV Metric Motion CaptureClassic casehttps://www.nokov.com/support/case_studies/6.html#case-list-1p>
https://www.nokov.com/motion-capture-robotic-arm.htmlClassic Case | NOKOV Metric Motion CaptureClassic casehttps://www.nokov.com/support/case_studies/6.html#case-list-1p>
边栏推荐
- golang-gin - graceful restart
- ML、DL、CV常见的问题整理
- C# using ComboBox control
- AWS implements scheduled tasks - Lambda+EventBridge
- Linux bash: redis-server: command not found
- 技能大赛训练题: 子网掩码划分案例
- 图像大面积缺失,也能逼真修复,新模型CM-GAN兼顾全局结构和纹理细节
- Node version switching management using NVM
- The importance of strategic offensive capability is much higher than strategic defensive capability
- The use of C# control CheckBox
猜你喜欢
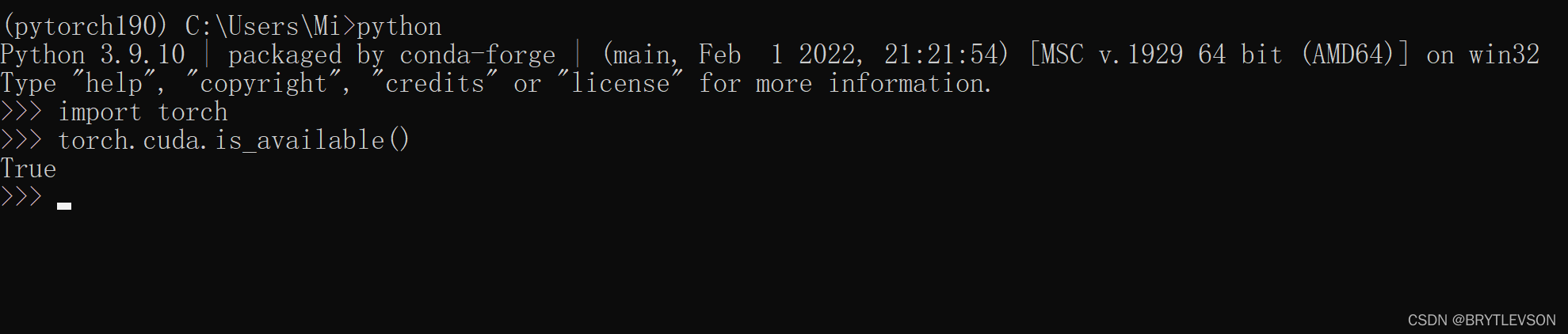
pytorch gpu版本安装最新
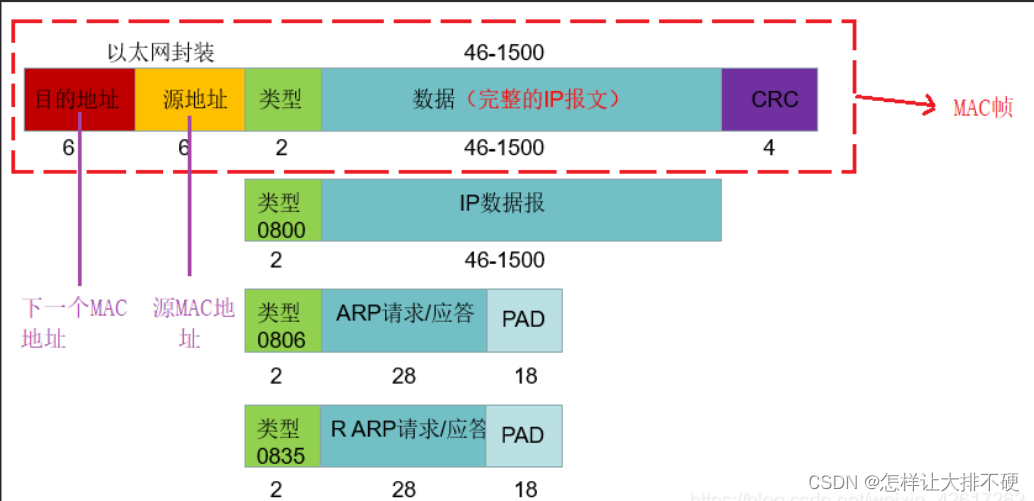
网络协议及相关技术详解

ECCV 2022 | 机器人的交互感知与物体操作

深度剖析 Apache EventMesh 云原生分布式事件驱动架构
Error IDEA Terminated with exit code 1

已解决(pymysqL连接数据库报错)pymysqL.err.ProgrammingError: (1146,“Table ‘test.students‘ doesn‘t exist“)

C# control ListView usage

golang-gin-pprof-使用以及安全问题
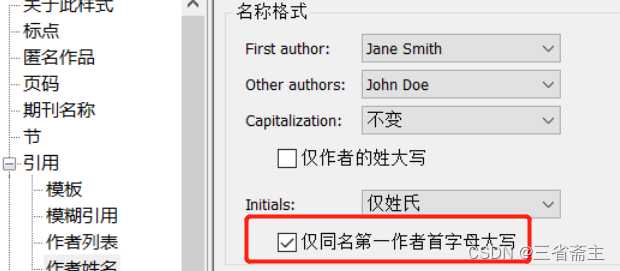
endnote引用

The pre-sale of the new Hyundai Paristi is open, and safety and comfort are not lost
随机推荐
ML、DL、CV常见的问题整理
Save and load numpy matrices and vectors, and use the saved vectors for similarity calculation
Text similarity calculation (Chinese and English) detailed explanation of actual combat
网络层重点协议——IP协议
C# using ComboBox control
Even if the image is missing in a large area, it can also be repaired realistically. The new model CM-GAN takes into account the global structure and texture details
Shell项目实战1.系统性能分析
技能大赛训练题:交换机的远程管理
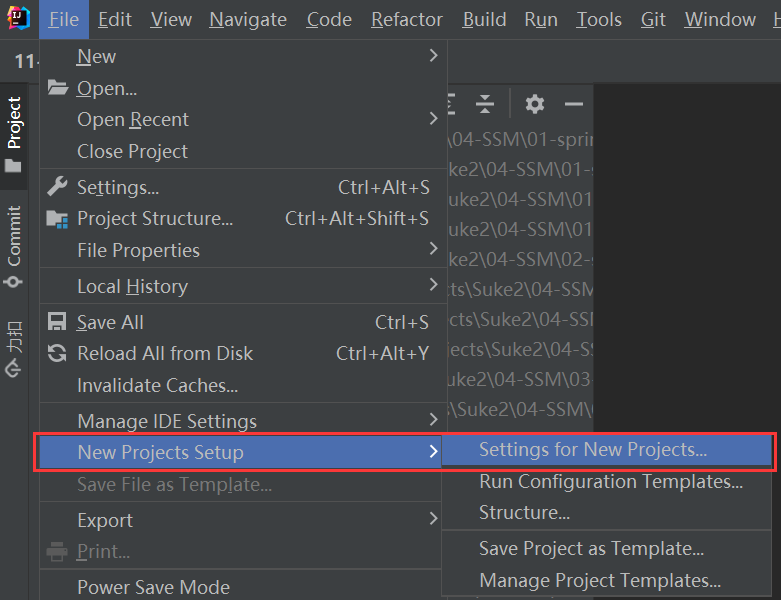
How IDEA runs web programs
IDEA connects to MySQL database and uses data
AI cocoa AI frontier introduction (7.31)
C# control ToolStripProgressBar usage
技能大赛训练题: 子网掩码划分案例
[QNX Hypervisor 2.2用户手册]9.14 safety
pytorch gpu版本安装最新
The use of C# control CheckBox
使用NVM进行node版本切换管理
CLion用于STM32开发
自制的数据库安全攻防题,相关靶机自己制作
LeetCode·304竞赛·6132·使数组中所有元素都等于零·模拟·哈希