当前位置:网站首页>Comparison of Optical Motion Capture and UWB Positioning Technology in Multi-agent Cooperative Control Research
Comparison of Optical Motion Capture and UWB Positioning Technology in Multi-agent Cooperative Control Research
2022-07-31 13:47:00 【MocapLeader】
When humans do any work, they always emphasize teamwork, teamwork.With the interdisciplinary development and integration of control science, computer science and other disciplines, in the field of intelligent body control, the control of a single robot, unmanned aerial vehicle, and unmanned vehicle can no longer meet the technical needs of the current field.These agents complete multi-unit and multi-dimensional cooperative work, and the cooperative control and application of multi-agent systems has become one of the research hotspots in many fields such as control, mathematics, communication, biology and artificial intelligence.
In the process of completing multi-agent cooperative control, the mainstream positioning technologies currently used are Optical Motion Capture (Optical Motion Capture) and UWB (Ultra Wide Band, Ultra Wide Band).Both technologies have their own characteristics.
Get Data Type
Optical motion capture obtains the position information of the marker points on the agent through the lens in the collaborative control experiment to calculate the position information and pose information of the agent, transmits the data to the host through SDK or VRPN, and then transmits the data to the host through the SDK or VRPN.The calculation and actual control software sends the intelligent body to complete real-time control through wireless signals; while UWB technology is a wireless carrier communication technology that uses a frequency bandwidth above 1GHz, and it cannot be completely a position control technology.Carry a signal transmitting device to indirectly obtain the location of the agent in this way.In contrast, optical motion capture can provide both the location information and attitude information of the agent, while UWB technology can only provide the location information of the agent alone.In a market with increasingly diverse and complex needs, agents that only move in position can no longer meet the needs of the current market.What is needed now is that the drone not only flies in a straight line, but can know its own attitude in the air, adjust it at any time, and even roll over. At this time, UWB technology cannot meet the control requirements.

Capture Accuracy and Latency
Not only the data support, but also the UWB system built indoors, the overall accuracy will be greatly reduced in the case of civil and commercial use, about centimeters, and the transmission range is only about 10m.However, the indoor capture accuracy of optical motion capture can reach sub-millimeter level, and the entire capture range has no upper limit according to the setting of the venue and the number of lenses.
The optical motion capture system can not only provide high-precision, low-interference information, but also transmit the position and attitude information of the agent back to the host in high real-time, and the overall data information returned to the agent is low-latencyYes, latency can be as low as a few milliseconds.
Hardware Comparison
In terms of hardware, UWB needs to install a device that transmits radio waves on the intelligent body, which will increase the complexity and uncontrollability of the collaborative control process.The optical motion capture system only sticks a few very light special markers on the intelligent body, no other equipment is required, and it will not cause other interference to the intelligent body, which not only ensures accurate position and attitude information, but also ensures that noInterfere with the cooperative control process and provide a stable and reliable activity space.
Typical Cases
Many teams in China are also conducting research on multi-agent collaborative control. Now, Professor Xia Yuanqing's team from Beijing Institute of Technology has completed the research on air-ground collaborative control. After comparing different positioning technologies for many times, the team adopted NOKOV metrology optical threeA motion capture system is used as the positioning system for the final study.In the whole research process, the NOKOV metric optical 3D motion capture system provides the research with the spatial position and attitude information of the unmanned vehicle, which makes the whole research proceed smoothly.Finally, the preliminary research was successfully completed, and it was reported by Xinhuanet.
 https://www.nokov.com/support/case_studies_detail/multi-intelligent-cooperative-control-experimental-platform.html
https://www.nokov.com/support/case_studies_detail/multi-intelligent-cooperative-control-experimental-platform.html边栏推荐
- 技能大赛dhcp服务训练题
- PartImageNet物体部件分割(Semantic Part Segmentation)数据集介绍
- 技能大赛训练题:交换机的远程管理
- go使用makefile脚本编译应用
- VU 非父子组件通信
- C#高级--委托
- AWS implements scheduled tasks - Lambda+EventBridge
- ECCV2022: Recursion on Transformer without adding parameters and less computation!
- 多智能体协同控制研究中光学动作捕捉与UWB定位技术比较
- Batch大小不一定是2的n次幂!ML资深学者最新结论
猜你喜欢
【蓝桥杯选拔赛真题46】Scratch磁铁游戏 少儿编程scratch蓝桥杯选拔赛真题讲解

C# using NumericUpDown control
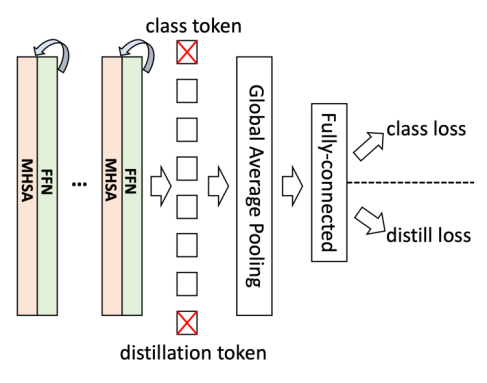
ECCV2022: Recursion on Transformer without adding parameters and less computation!
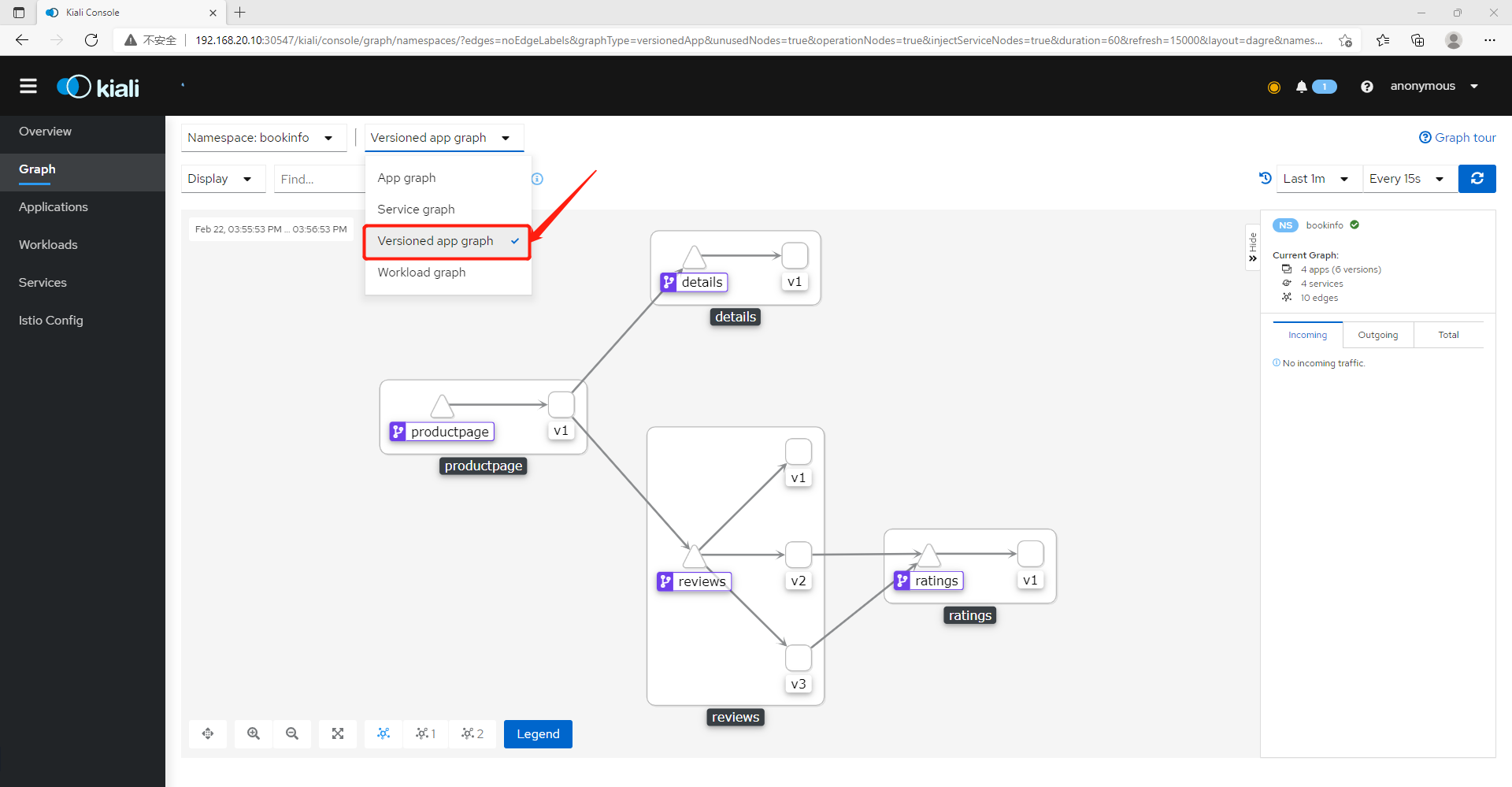
Istio微服务治理网格的全方面可视化监控(微服务架构展示、资源监控、流量监控、链路监控)
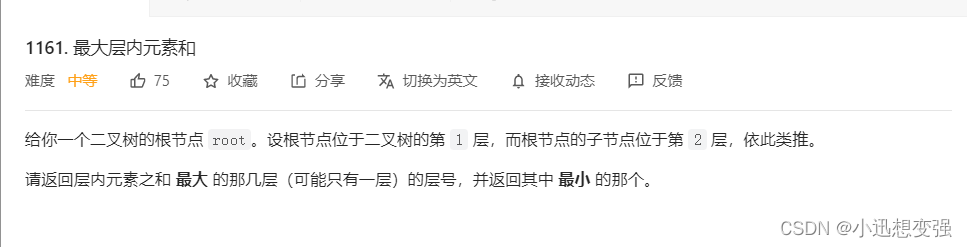
LeetCode·每日一题·1161.最大层内元素和·层次遍历

1小时直播招募令:行业大咖干货分享,企业报名开启丨量子位·视点

LeetCode·304竞赛·6132·使数组中所有元素都等于零·模拟·哈希

C#控件CheckBox的使用
操作符详解
49.【拷贝构造函数与重载】
随机推荐
matlab as(assert dominance)
使用NVM进行node版本切换管理
新款现代帕里斯帝预售开启,安全、舒适一个不落
AI cocoa AI frontier introduction (7.31)
EXCEL如何快速拆分合并单元格数据
报错:npm ERR code EPERM
[RPI]树莓派监控温度及报警关机保护「建议收藏」
推荐系统-召回阶段-2013:DSSM(双塔模型)【Embedding(语义向量)召回】【微软】
leetcode:2032. 至少在两个数组中出现的值
LeetCode·304竞赛·6132·使数组中所有元素都等于零·模拟·哈希
A detailed explanation of the usage of Async and Await in C#
Open Inventor 10.12 重大改进--和谐版
IDEA找不到Database解决方法
Detailed explanation of network protocols and related technologies
Four ways to clear the float and its principle understanding
动作捕捉系统用于柔性机械臂的末端定位控制
滑窗法切分数据
【蓝桥杯选拔赛真题46】Scratch磁铁游戏 少儿编程scratch蓝桥杯选拔赛真题讲解
3.爬虫之Scrapy框架1安装与使用
Edge Cloud Explained in Simple Depth | 4. Lifecycle Management