当前位置:网站首页>空中操作仅通过距离映射对遮挡目标进行鲁棒定位(RAL2022)
空中操作仅通过距离映射对遮挡目标进行鲁棒定位(RAL2022)
2022-06-21 17:28:00 【3D视觉工坊】
作者丨[email protected]知乎
来源丨https://zhuanlan.zhihu.com/p/457168226
编辑丨3D视觉工坊
介绍一下我们已经被RA-L接受的一篇文章。这篇文章不是做SLAM,但和SLAM密切相关,还是挺有意思的。在这里仅介绍总体思路,详细内容还请查阅论文。
论文链接:https://shiyuzhao.westlake.edu.cn/style/2022RAL_XiaoyuZhang.pdf
视频链接:https://www.youtube.com/watch?v=t6-0zaRuFIY;
https://www.bilibili.com/video/BV11T4y1m7tN?share_source=copy_web&vd_source=534ab035a008ff26525503ac9b890e83
背景
在SLAM中,我们希望实现传感器(机器人)的自身定位,为此需要建立基于空间点等几何特征的环境地图;通过地图特征与传感器观测量的几何约束关系求解传感器位姿状态。
而在这项工作中,我们希望实现目标的定位,也就是获得目标点相对于传感器坐标系的三维空间位置。该工作的背景是空中操作机器人,其中目标的遮挡、丢失等问题较多。因此我们希望能够实现对遮挡物体的定位,也就是即使没有看到目标,也可知道其相对位置。
这一问题也可以借助SLAM的方法实现,例如将目标点建立到环境地图中,便可以容易地计算其到相机的相对位置。但这一方法的精度会受到目标点位置精度,相机定位精度等因素的影响。
在这篇论文中,我们希望对目标的定位不依赖于相机的自身定位。因此,我们仿照SLAM提出了新的目标定位方法,为此我们建立了新的地图形式,最终实现的是目标点的相对位置计算,该过程中不进行相机的定位。
方法
该方法基于RGB-D相机实现,也可拓展到双目相机。目标位置以点的形式计算和保存,需要在第一帧图像中给定。在具体实现中,我们用特征点表示目标点,因此文中观测到目标点指的是与目标点匹配成功。
目标定位的核心算法其实比较简单,就是在观测到目标点时,保存目标点与周围特征点的空间关系;没有观测到目标点时,利用匹配的特征点与目标点的空间关系计算目标点的位置。这里的空间关系可以有不同形式,例如方向向量等。但我们选用的是距离。因为距离是与坐标系无关的,因此在进行目标定位的过程中不需要已知相机的自身位姿。基于距离的目标定位其实也比较简单,类似于GPS等三点定位(可参考:iBeacon定位-三点定位实现)。在空间中,已知不在同一平面上的四个点,以及它们到目标点的距离,即可计算出唯一的目标点位置。
具体来讲,我们在每帧图像中提取ORB特征点,其深度值可由深度图或双目匹配计算得到,因此可获得特征点在相机坐标系下的三维坐标:

对目标点做同样处理,因此可在一帧图像中计算目标点到特征点的距离:


系统
根据上述方法,我们仿照SLAM搭建了一个目标定位系统:

pipeline
可以看出来,这里与SLAM是非常像的,也是分为了建图和定位两部分,但含义不同。建图中,我们仅保存特征点到目标点的距离,并不保存点的三维坐标,在论文中,该地图被称为target-centered range-only map。定位中,实现的是求解目标点在当前相机坐标系中的三维空间位置,核心是构建上述的优化方程,难点是特征点匹配。
仿照SLAM系统,在特征点匹配时也采用了与上一帧匹配,在局部地图中匹配等多个过程。计算求解时使用上一帧的结果作为初值。从关键帧中构建新的地图点,更新之前的地图点等。还有其他一些实现细节可以在论文中查看,基本上是和SLAM系统一一对应的,就差一个回环检测了,其实也可以加(但我懒)。整个系统并不复杂,特别是对熟悉SLAM的同学来说,所以就不在此赘述了。
实验
实验选取了两组数据,一组来自ICL-NUIM数据集,因为它可以提供目标点的真值;另一组是我们自己使用realsense采集的数据,并用VICON提供了真值。在两组实验中,我们都和SLAM(ORB-SLAM3)做了精度对比。
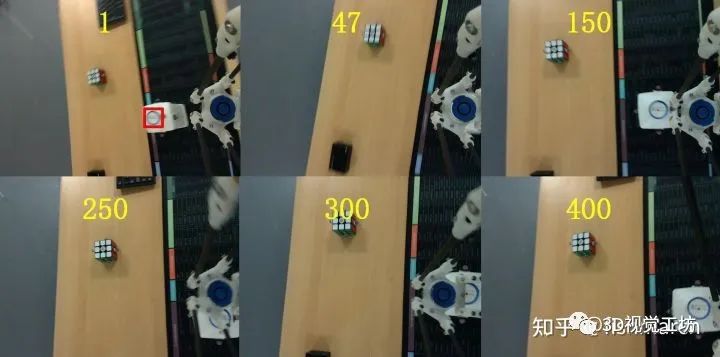
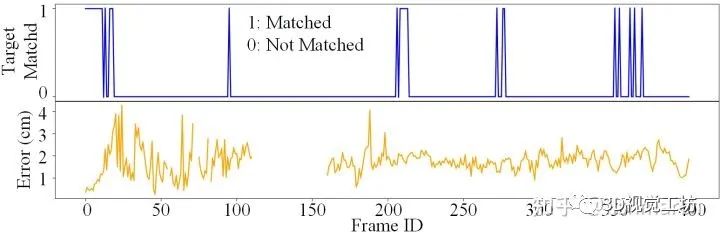
其中一组实验数据如上图所示,在第一帧中标记瓶盖处为目标,随着无人机的运动,目标会被机械臂遮挡,或移出相机画面,但整个过程中,我们的方法都会提供目标位置。定位误差如下图所示,蓝色曲线表示是否匹配到了目标点,换色曲线为定位误差,可以看出无论目标是否被遮挡,目标都可以定位到,且误差几乎不变。其中有一小段由于特征匹配等原因失败了,但后面可以恢复回来。



SLAM方法中误差较大,除了累积误差等。我觉得是因为,SLAM是将所有的特征点位置、相机位姿放在一个优化方程中求解一个整体误差最小的结果,但这并不意味着其中的某一个误差(目标点位置)会变小,甚至可能变大。例如下图所示的在ICL数据集中的某次定位结果,使用SLAM方法时,目标点在一次局部优化后位置出现了很大的变化,误差也立刻增大。
总之,使用SLAM方法定位时,目标点位置会受到相机位姿,其他特征点位置等各种误差的影响。而我们的方法希望能够使目标定位精度不受这些额外量的影响,且可应对目标遮挡、丢失等问题。

本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
边栏推荐
- 产品图文列表说明布局样式
- 【Go语言】Go语言我们应该这样学~全网较全的学习教程
- 图像分类、AI 与全自动性能测试
- Ropsten测试网的水龙头上得到一些ETH
- Blue SVG wave dynamic web page background
- Basic data type and structure data type of TS
- markdown写作软件:Ulysses v27
- Metagenome (personal notes)
- C语言__attribute__(packed)属性(学习一下)
- Must the database primary key be self incremented? What scenarios do not suggest self augmentation?
猜你喜欢

牛客网:归并两个有序的数组

College Physics Chapter 9 vibration

Day10QRadiobutton2021-09-24

Character processing of node

Day16QtQLabel2021-10-22

R language bug? report errors? As for the outcome of sub variables 0 and 1, the original content of the outcome variable is changed through the process of factor and numeric?

Blue SVG wave dynamic web page background
![[AISI software] wechat applet development quotation scheme template](/img/eb/2f7e8977910a7c016bb3f6ede286f6.png)
[AISI software] wechat applet development quotation scheme template

I/0多路转接之select
大学物理第9章·振动
随机推荐
Servlet规范(一)
Canvas dynamic mesh background JS effect
Canvas interactive color gradient JS special effect code
新赛季的中超和国安,荆棘中前行
Global installation of node
Three. JS 3D particle animation JS special effect code
Image classification, AI and automatic performance test
使用tidevice启动WDA
Cookies and sessions
Generics of typescript
Day14QProgressBar2021-10-17
# bash 的 try catch
9.后缀、前缀函数-suffix basename addsuffix addprefix
A test tool for recording and playback interface based on mitmproxy
[AISI software] wechat applet development quotation scheme template
文末送书 | 李航老师新作!机器学习经典著作《统计学习方法》全新升级
[HCTF 2018]WarmUp
Does the school belong to a securities company? Is it safe to open an account?
【Go语言】Go语言我们应该这样学~全网较全的学习教程
R language various logistic regression common conditions iptw