当前位置:网站首页>[matlab WSN communication] a_ Star improved leach multi hop transmission protocol [including source code phase 487]
[matlab WSN communication] a_ Star improved leach multi hop transmission protocol [including source code phase 487]
2022-06-11 06:48:00 【Matlab fo Nu Tang Lian】
One 、 Code run video ( Bili, Bili )
Two 、 Introduction to ant colony algorithm and grid map
With the application of robot technology in many fields , Such as Robot Cooperative welding 、 Post disaster search and rescue 、 military 、 Space exploration 、 Deep sea exploration 、 Household and service industries, etc , The development of robot is extending in the direction of intelligence , It is required to have self-organization 、 Self learning 、 Adaptive and other capabilities . Robot path planning means that the robot avoids obstacles from its initial position according to some rules 、 Reach the target position without collision . At present, the main methods used in the research of path planning at home and abroad are : Artificial potential field method 、 Probabilistic path graph method [3]、 Visual graph method 、 Grid method 、 Neural network algorithm 、 Genetic algorithm (ga) 、 Particle swarm optimization 、 Ant colony algorithm .
The grid method decomposes the search space of the robot into several units of equal size , Decompose complex environmental problems into simple problems , Path planning for static environments , And the calculation amount of the algorithm is small , Easy to implement , But in a complex environment , It is easy to prolong the planning time , The real-time performance of the system is not enough . Ant colony algorithm is a new bionic algorithm , Take ants foraging as a model , Through the previous generation of ants in the path left by the strength of pheromones to choose the path . The algorithm has good positive feedback 、 Parallelism and robustness ; But when it comes to complex problems , It will lead to long search time 、 Fall into local optimum 、 Stagnation, deadlock, etc . therefore , Combining the advantages and disadvantages of grid method and ant colony algorithm , The grid method and ant colony algorithm are combined for path planning , First create a grid map , Then the ant colony algorithm is used for global search , It can improve the performance of the algorithm .
1 Grid modeling
1.1 Introduction to the application of grid method in path planning
The grid method is made up of W.E.Howden On 1968 in , It is mainly to establish a path grid map according to the environment (map) . The basic principle is to divide the robot working environment into countless small grid cells with binary information , The size of each mesh is determined by the step size of the robot , That is, one step represents one grid size . When meshing , When there is less than one barrier grid or non barrier grid , Fill it up , Calculate by one grid .
The environment information is represented by a black-and-white grid . The black grid represents obstacles (barrier) , Indicates an infeasible area ; The white grid represents the passable area , Also called free zone . The grid method uses a binary matrix to represent the infeasible region and the free region , Matrix 1 It's for obstacles , 0 Stands for free grid , Thus, a path planning map that can describe the environment is established in the environment .
1.2 The establishment of grid map
hypothesis SP It is a regular convex polygon playground for robot in two-dimensional space , Break down the site into M×N A grid , It is composed of free grid and obstacle grid , Its movement mode is mainly in the form of octree . A collection of free grids P={P1, P2, …, Pm}, A collection of obstacle grids B={B1, B2, …, Bn}, set up A A collection of grids for robot workplaces , The expression is A=P∪B.
Based on the experimental site, a 10×10 grid map , Pictured 1 Shown . The sequence number set of the grid in the figure C={1, 2, 3, …, 100}. hypothesis 1 The sign is the initial position Gstart, 100 The sign is the target position Ggoal, The robot passes from its initial position n Second iteration search to find the best path , Where the initial position Gstart∈A And , Target location Ggoal∈A And , The specified initial position does not coincide with the target position , In the path search, it mainly searches in the form of octree .
2 Ant colony algorithm path planning problem description
2.1 Description of basic ant colony algorithm
Ant colony algorithm is a bionic algorithm that imitates ant colony foraging , The basic principle is to regard each robot as an ant in the ant colony . The ant searches the path through the pheromone strength left by the ant colony on the path , Send messages to other ants , Realize information exchange between robots . Usually the path is unknown , Ants usually choose their path according to probability Pkij (t) Random selection .
among :α Is the heuristic factor ;β Is the expected heuristic factor ;τij For robots k From the position i To the position j The strength of pheromones left on this path ;allowedk Represents a collection of grids that have not been accessed by the robot ;ηij (t) Is a heuristic function , The size of the heuristic function is the same as i、j About the distance between , dij The smaller the value. , i, j The closer the relationship is , On the contrary, they are alienated , The expression is 
In style (xi, yi) Is the position coordinate of the point , (xj, yj) Is the position coordinate of the point .
2.2 Ant pheromone update
The robot will leave New pheromones on the path in the process of path search , The strength of pheromones left on the path increases with time , In order to avoid flooding heuristic information due to too many pheromones remaining in the search path , therefore , When the ant completes a search , Update the pheromones on all paths once , The expression is 
among :1-ρ Indicates pheromone residue factor , ρ Indicates pheromone volatilization coefficient ;Δτij (t) Indicates the path of the ant in this cycle (i, j) Pheromone increments on , Δτkij (t) It means the first one k An ant passes the path (i, j) The amount of pheromone increase in this cycle . According to the pheromone rule , Select ant week (ant-cycle) The model updates the model as an ant pheromone .
In style , Q Represents pheromone strength , Lk It means the first one k Only the total length of all paths of ants in this cycle .
3、 ... and 、matlab Edition and references
1 matlab edition
2019b
2 reference
[1] Zhou Dongjian , Zhang Xingguo , Ma Haibo , Li Chenghao , Guo Xu . Grid based map - Robot optimal path planning based on ant colony algorithm [J]. Journal of Nantong University ( Natural science edition ). 2013,12(04)
3 remarks
This part of the introduction is taken from the Internet , For reference only , If infringement , Contact deletion
边栏推荐
- On cursor in MySQL
- Sohu employees encounter wage subsidy fraud. What is the difference between black property and gray property and how to trace the source?
- client-go gin的简单整合六-list-watch二(关于Rs与Pod以及Deployment的完善)
- Do you know what the quotation for it talent assignment service is? It is recommended that programmers also understand
- 【Matlab印刷字符识别】OCR印刷字母+数字识别【含源码 1861期】
- 关于SIoU的原理和代码实现(回顾IoU、GIoU、DIoU、CIoU)
- 核查医药代表备案信息是否正确
- Handwriting promise [03] - realize multiple calls and chain calls of then method
- SQL language - query statement
- Resolve typeerror: ctx injections. tableRoot.$ scopedSlots[ctx.props.column.slot] is not a function
猜你喜欢
![Quick sorting of graphic array [with source code]](/img/ef/b1b98db5b16f0c4efc8d3c5247e8b0.jpg)
Quick sorting of graphic array [with source code]

Use of qscriptengine class

解决ffmpeg獲取AAC音頻文件duration不准
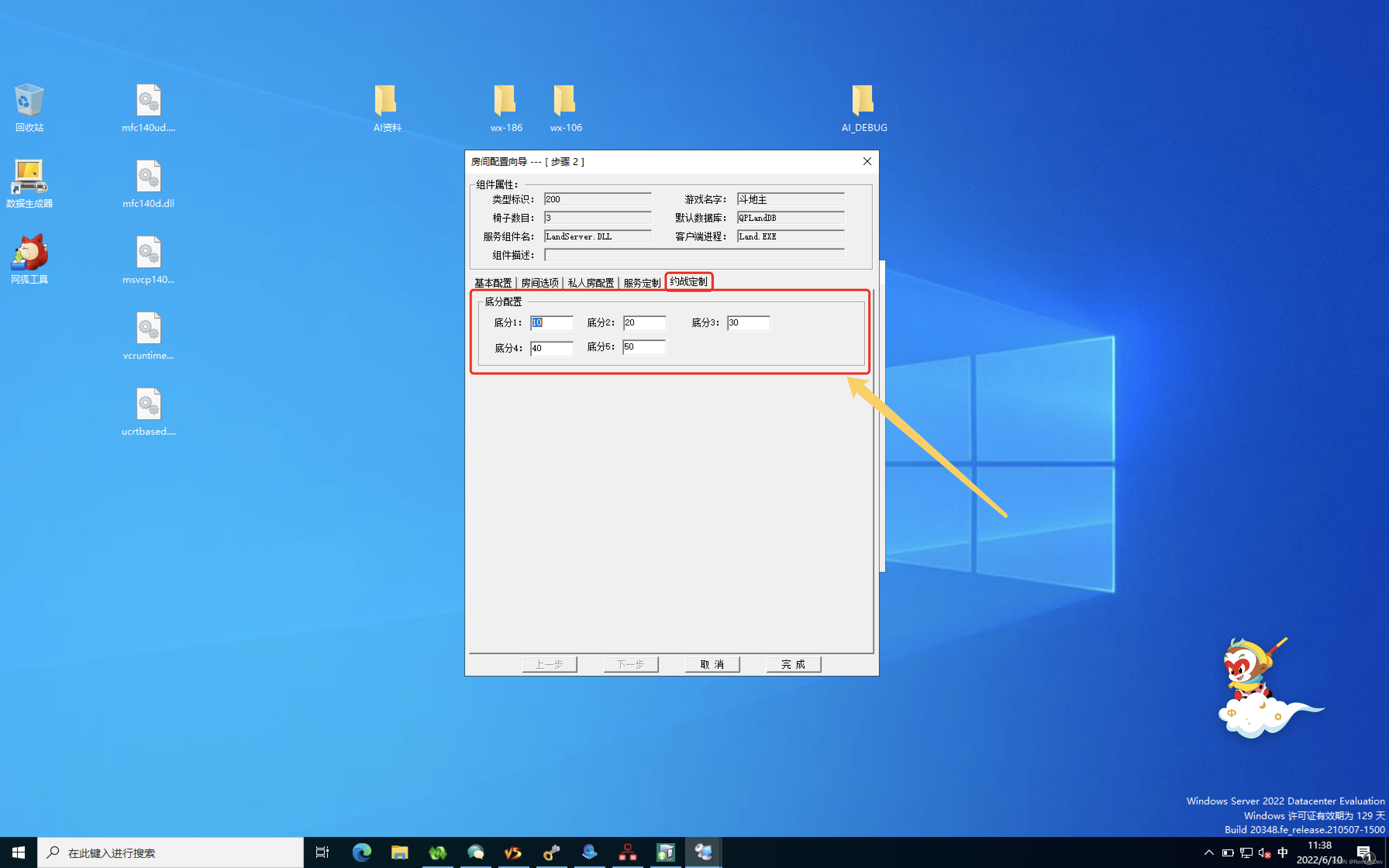
网狐游戏服务器房间配置约战定制功能实现
![Illustration of JS implementation from insertion sort to binary insertion sort [with source code]](/img/e5/1956af15712ac3e89302d7dd73f403.jpg)
Illustration of JS implementation from insertion sort to binary insertion sort [with source code]
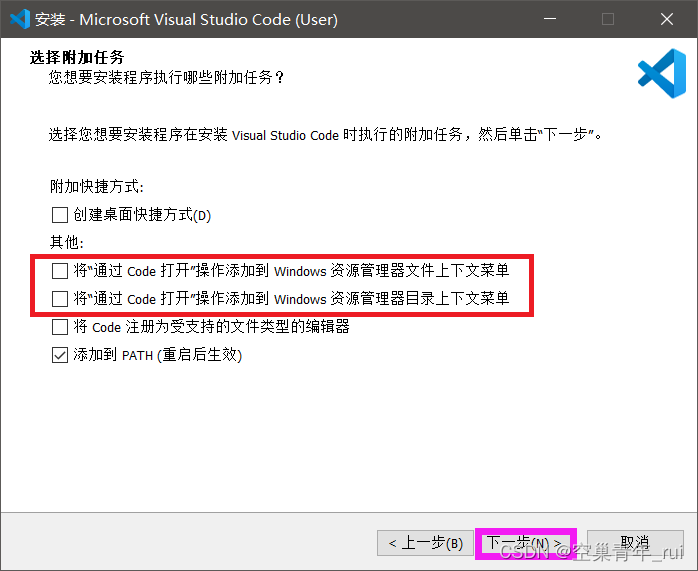
Fix the problem that the right mouse button does not have a vscode shortcut

Mediaextractor source code analysis of multimedia framework analysis (1)

Sohu employees encounter wage subsidy fraud. What is the difference between black property and gray property and how to trace the source?

563. 二叉树的坡度

UEFI查找PCI设备
随机推荐
A highly controversial issue
JS judge whether the year is a leap year and the number of days in the month
Required reading 1: the larger the pattern, the better they know how to speak
【Matlab印刷字符识别】OCR印刷字母+数字识别【含源码 1861期】
Scripy web crawler series tutorials (I) | construction of scripy crawler framework development environment
Count the time-consuming duration of an operation (function)
Dynamic import
解决ffmpeg获取AAC音频文件duration不准
核查医药代表备案信息是否正确
June training (day 11) - matrix
JS implementation of graphic merging and sorting process [source code attached]
617. merge binary tree
instanceof到底是怎样判断引用数据类型的!
Mediaextractor source code analysis of multimedia framework analysis (1)
Text overflow failure
Use of qscriptengine class
Who is stronger, zip or 7-Zip, and how to choose?
Fix the problem that the right mouse button does not have a vscode shortcut
fatal: refusing to merge unrelated histories
关于parseInt()