当前位置:网站首页>Motion analysis and parameter optimization of crank-slider mechanism
Motion analysis and parameter optimization of crank-slider mechanism
2022-08-01 05:33:00 【student_domi】
1. Introduction
Slightly
465-can communicate, consult, answer questions
2. Description of content
Slightly
The mathematical formula refers to this document: Crank SliderKinematic Analysis and Mechanical Calculation of Block Mechanism--Baidu Library
3. Simulation analysis
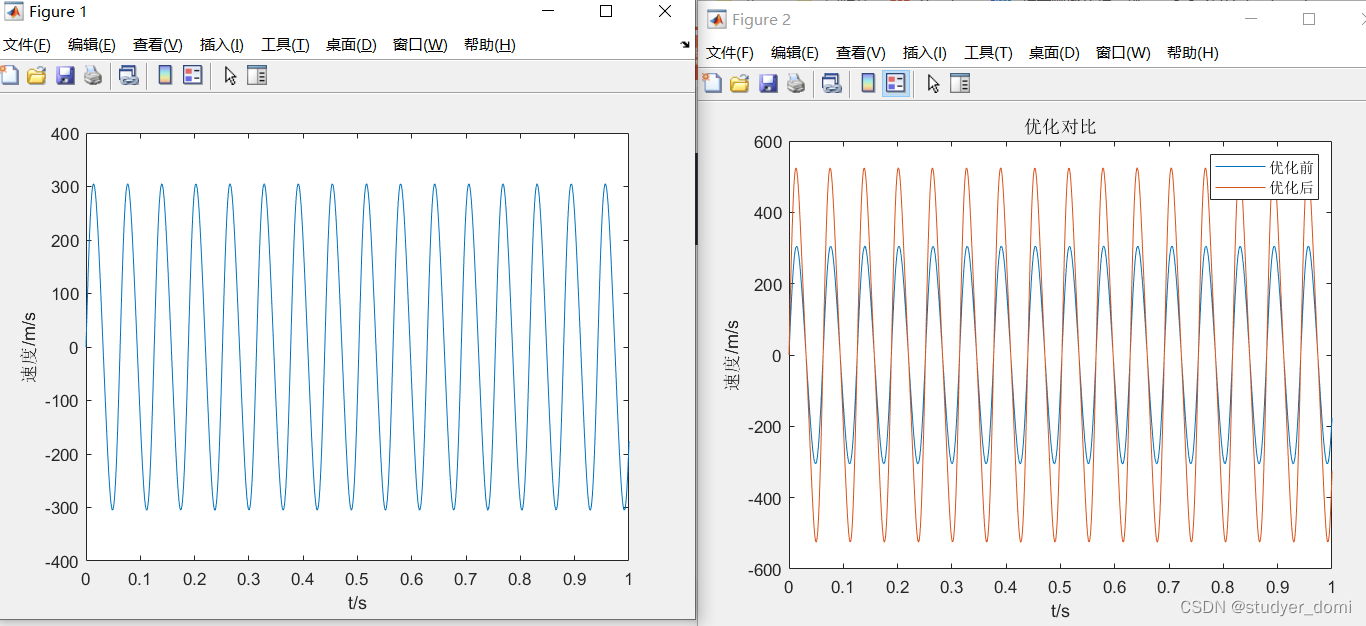
clcclose allclearr = 3;l = 16;lameda = r/l;w = 100;t = 0:0.001:1;v = w*r*(sin(w*t)+0.5*lameda*sin(2*w*t));figureplot(t,v)xlabel t/sylabel speed/m/s% In order to calculate the maximum value, since fmincon calculates the minimum value,% Therefore, the value is converted to a negative number, and the absolute value of the minimum value of the negative number is the maximum valuemyfun = @(x)-100*x(1)*(0.5+sqrt(3)/4*x(1)/x(2));x0 = [3,16]; % initial value r and lA = [2.5 -1;1,-1;1 1]; % inequalities r and lb = [0;-10;20]; % A*x <= bAeq = [];beq = []; % Aeq*x = blb = [0.5,2.5]; % lower limit of r and lub = [10,25]; % upper limit of r and loptions = optimset('Display','iter'); % Display each iteration process[x, fval] = fmincon(myfun,x0,A,b,Aeq,beq,lb,ub,[],options) % call the minimum value calculation% x is the optimized r and l fval is the maximum speed of the calculationmax_v = abs(fval)r_opt = x(1);l_opt = x(2);lameda_opt = r_opt/l_opt;v_opt = w*r_opt*(sin(w*t)+0.5*lameda_opt*sin(2*w*t));figureplot(t,v,t,v_opt)xlabel t/sylabel speed/m/stitle optimization comparisonlegend('before optimization', 'after optimization')![]()
4. Reference papers
Slightly
边栏推荐
猜你喜欢






随机推荐
Robot growth in China
2022/07/29 入职健海JustFE团队,我学到了高效开发(年中总结)
曲柄滑块机构运动分析和参数优化
移动应用恶意攻击激增500% 三六零天御为APP免费构建安全屏障
After the image is updated, Glide loading is still the original image problem
uva10825
Power button (LeetCode) 212. The word search II (2022.07.31)
Seleniu:元素常用操作
用控件当画笔获得bitmap代码记录
NUMPY
Qt Widget project loading example of qml
USB3.0:VL817Q7-C0的LAYOUT指南(二)
DL-31/6电流继电器
HJS-DE1/2时间继电器
Selenium: upload and download files
Robot_Framework: commonly used built-in keywords
使用string 容器翻转 字母
图片更新之后Glide加载依旧是原来的图片问题
NUMPY
LeetCode每日一题(309. Best Time to Buy and Sell Stock with Cooldown)