当前位置:网站首页>Eigen矩阵运算库快速上手
Eigen矩阵运算库快速上手
2022-07-01 07:18:00 【程序猿老甘】
目录
做科研类项目,尤其是与线性优化,主成分分析有关的项目,势必需要用到矩阵计算及相关的优化工具。很多同学会利用matlab完成项目需求,这当然是一个不错的选择。但是,对于平台有一定要求的项目,尤其是那些基于C++开发的工程项目,使用matlab就会带来一些不便。我们希望有方便的矩阵开源工具,可以集成在项目中,以简化程序部署与使用的难度。这里就不得不提到大名鼎鼎的矩阵开源库,Eigen。今天这篇博客,就来跟大家介绍下Eigen部署与使用的基本知识,方便新手朋友能够快速掌握基于Eigen实现的矩阵计算与优化功能。
1. 配置
首先我们在官网上下载Eigen最新版本(V3.4)
3.4.0 · libeigen / eigen · GitLab

这里我们使用VS2022作为开发平台。配置非常简单,只要在VC++目录的include添加Eigen路径就可以。

这里贴一段测试代码:
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
using namespace std;
typedef Eigen::Matrix<int, 3, 3> Matrix3i;
int main()
{
Matrix3i m1;
m1 << 1, 2, 3, 4, 5, 6, 7, 8, 9;
cout << "m1 = \n" << m1 << endl;
Matrix3i m2;
m2 << 2, 0, 0, 0, 2, 0, 0, 0, 2;
cout << "m2 = \n" << m2 << endl;
cout << "m1 * m2 = \n" << (m1 * m2) << endl;
return 0;
}打印结果:
2. 初始化
在配置完Eigen后,接下来我们希望知道如何对向量和矩阵实现初始化。Eigen支持初始化方式很多, 参考博客Eigen库的使用小结,Eigen库的使用,Eigen初始化,我们列出几种供参考:
2.1 Array类
直接赋值
Eigen::Array<int, 3, 1> arr_1(1, 2, 3);流输入赋值
Eigen::Array<int, 3, 3> arr_2;
arr_2 <<
1, 2, 3,
4, 5, 6,
7, 8, 9;指针方式赋值
std::vector<int> vec_int{ 1,2,3,4,5,6,7,8,9 };
Eigen::Array<int, 3, 3> arr_3(vec_int.data());2.2 Vector类
Vector的赋值方法与Array基本相同。Vector可以被看做是一种特殊的Matrix。
Eigen::Vector3f v1 = Eigen::Vector3f::Zero();
Eigen::Vector3d v2(1.0, 2.0, 3.0);
Eigen::VectorXf v3(20); //维度为20的向量,未初始化.
v3 << 1.0 , 2.0 , 3.0;2.3 Matrix类
与Array的初始化方法基本相同
Eigen::Matrix<double,2,2> m;
m << 1,2,3,4;
Eigen::MatrixXf m1(2,3);
m1 << 1,2,3,
4,5,6;
Eigen::Matrix3d m2 = Eigen::Matrix3d::Identity();//Eigen::Matrix3d::Zero();
Eigen::Matrix3d m3 = Eigen::Matrix3d::Random(); //随机初始化2.4 Vector赋值
有的时候,我们会将数据存储在C++的数据结构vector中。此时,我们希望将vector的数据转换为矩阵,并进行相应计算。除了使用指针方式,我们还可以直接将vector的数据拷贝到矩阵中。
std::vector<std::vector<double>> LX;
MatrixXd m_Lx(LX.size(), 3);
for (int i = 0; i < LX.size(); i++) {
m_Lx(i, 0) = LX[i][0];
m_Lx(i, 1) = LX[i][1];
m_Lx(i, 2) = LX[i][2];
}假设LX是一个点云数据,每一个点是一个三维向量。对应建立的MatrixXd m_LX即与LX具有相同的维度,即将C++的vector转换为eigen的matrix。
2.5 高级初始化
参考matlab,eigen也提供了一些功能丰富的高级数据初始化方法,包括对行列向量的独立赋值,块赋值等。这里我们列出一些示例代码,供参考。
列向量赋值
RowVectorXd rv1(1,2,3);块赋值
对m4进行计算,并按块赋值给m5,输出m5:
MatrixXf m4(2,2);
m4 << 1,2,3,4;
MatrixXf m5(4,4);
m5 << m4, m4 / 10, m4 * 10, m4;//将m5分了四块赋值
更加精准的赋值,首先输入第一行: 1, 2, 3; 之后按照block的信息,在矩阵的第二行,第一列插入一个2*2的子矩阵,4, 5, 6, 7;最后,在第三列,最后两个位置tail(2), 插入6, 9。可以看到,上述操作实现了对一个矩阵分块精准赋值。
Matrix3f m;
m.row(0) << 1,2,3;
m.block(1,0,2,2) << 4,5,6,7;
m.col(2).tail(2) << 6,9;3. 矩阵计算
基于赋值后的矩阵,我们希望通过Eigen实现对矩阵的计算。这里我们将矩阵计算分为三部分,包括矩阵基本计算,线性求解,特征值计算以及奇异值分解。
3.1 矩阵基本计算
矩阵基本计算比较简单,包括加,减,叉乘,点乘,转置,求逆等。
MatrixXf m = MatrixXf::Random(3,3);
MatrixXf m2 = MatrixXf::Random(3,3);
m.row(i);//矩阵第i行
m.col(j);//矩阵第j列
m.transpose();//转置
m.conjugate();//共轭
m.adjoint(); //共轭转置
m.minCoeff();//所有元素中最小元素
m.maxCoeff();//所有元素中最大元素
m.trace();//迹,对角元素的和
m.sum(); //所有元素求和
m.prod(); //所有元素求积
m.mean(); //所有元素求平均
m.dot(m2); //点乘
m.cross(m2);//叉乘3.2 线性求解
求解Ax=b,eigen提供了几个工具,包括:
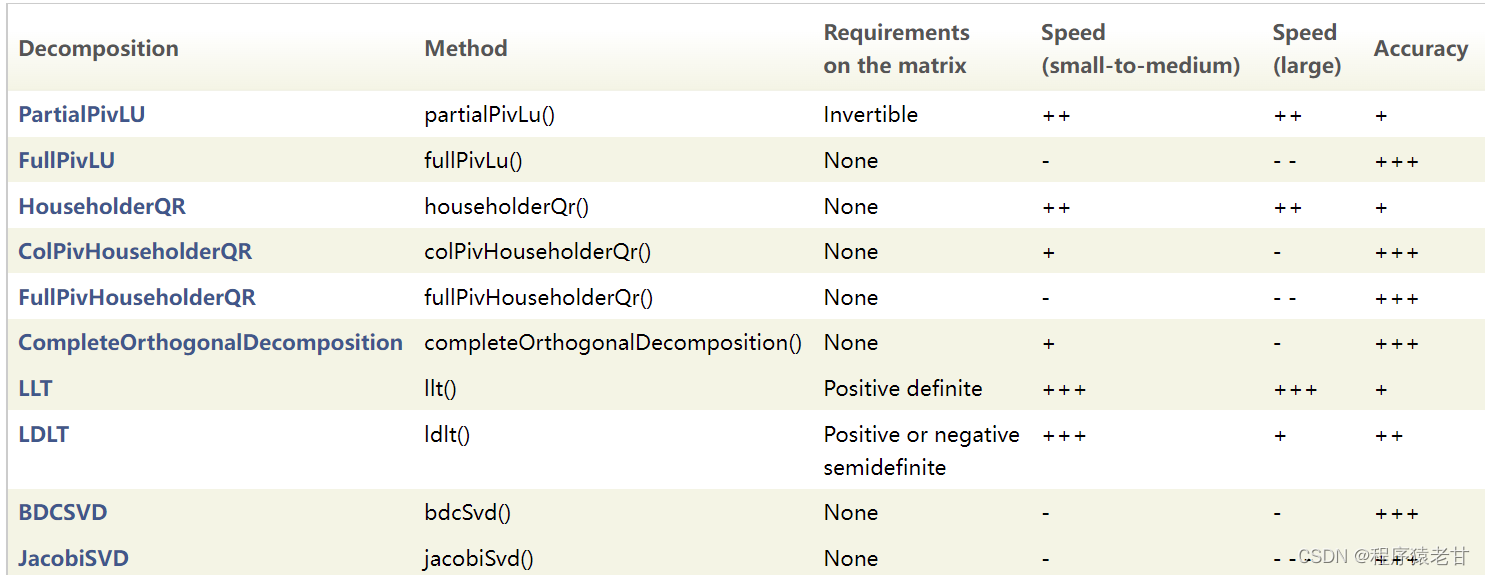
一般大家会选择LLT和LDLT
Eigen::Matrix2f A, b;
A << 2, -1, -1, 3;
b << 1, 2, 3, 1;
std::cout << "Here is the matrix A:\n" << A << std::endl;
std::cout << "Here is the right hand side b:\n" << b << std::endl;
Eigen::Matrix2f x = A.ldlt().solve(b);//or A.llt().solve(B);
std::cout << "The solution is:\n" << x << std::endl;3.3 特征值计算
特征值及对应的特征向量计算,在矩阵分析中占有重要位置。基于Eigen的特征值计算如下:
Eigen::MatrixXd m = Eigen::MatrixXd::Random(3,3);
Eigen::MatrixXd mTm = m.transpose() * m;//构成中心对其的协方差矩阵
//计算
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> eigen_solver(mTm);
//取出特征值和特征向量
Eigen::VectorXd eigenvalues = eigen_solver.eigenvalues();
Eigen::MatrixXd eigenvectors = eigen_solver.eigenvectors();
Eigen::VectorXd v0 = eigenvectors.col(0);// 因为特征值一般按从小到大排列,所以col(0)就是最小特征值对应的特征向量3.4 奇异值分解
参考博客:矩阵奇异值分解简介
奇异值分解(singular value decomposition, SVD):将矩阵分解为奇异向量(singular vector)和奇异值(singular value)。通过奇异值分解,我们会得到一些与特征分解相同类型的信息。然而,奇异值分解有更广泛的应用。每个实数矩阵都有一个奇异值分解,但不一定都有特征分解。例如,非方阵的矩阵没有特征分解,这是我们只能使用奇异值分解。
将矩阵A分解成三个矩阵的乘积:A=UDV^T。
这些矩阵中的每一个经定义后都拥有特殊的结构。矩阵U和V都被定义为正交矩阵,而矩阵D被定义为对角矩阵。注意,矩阵D不一定是方阵。对角矩阵D对角线上的元素被称为矩阵A的奇异值(singular value)。矩阵U的列向量被称为左奇异向量(left singular vector),矩阵V的列向量被称为右奇异向量(right singular vector)。A的左奇异向量是AA^T的特征向量。A的右奇异向量是A^TA的特征向量。A的非零奇异值是A^TA特征值的平方根,同时也是AA^T特征值的平方根。
JacobiSVD<MatrixXd> svd(J, ComputeThinU | ComputeThinV);
U = svd.matrixU();
V = svd.matrixV();
D_t = svd.singularValues();总结
作为基于C++的矩阵运算库,Eigen部署简单,执行效率高,集成了功能丰富的矩阵运算函数。掌握Eigen,能够显著提高项目对矩阵优化问题的求解效率。
边栏推荐
- 华泰证券开户是安全可靠的么?怎么开华泰证券账户
- 盘点华为云GaussDB(for Redis)六大秒级能力
- atguigu----脚手架--02-使用脚手架(2)
- Redisson utilise la solution complète - redisson Documents officiels + commentaires (Partie 1)
- Reply and explanation on issues related to "online training of network security education in 2022"
- [lingo] find the minimum connection diagram of seven cities to minimize the price of natural gas pipelines
- [matlab] solve nonlinear programming
- 【LINGO】求解二次规划
- Apple账号密码自动填充
- [Electrical dielectric number] electrical dielectric number and calculation considering HVDC and facts components
猜你喜欢

How to draw a product architecture diagram?

We found a huge hole in MySQL: do not judge the number of rows affected by update!!!

EasyNVS云管理平台功能重构:支持新增用户、修改信息等

The computer has a network, but all browser pages can't be opened. What's the matter?

TodoList经典案例①

The game is real! China software cup releases a new industrial innovation competition, and schools and enterprises can participate in it jointly

Redisson utilise la solution complète - redisson Documents officiels + commentaires (Partie 1)

【Tikhonov】基于Tikhonov正则化的图像超分辨率重建

【LINGO】求七个城市最小连线图,使天然气管道价格最低

灰度何以跌下神坛?
随机推荐
為什麼這麼多人轉行產品經理?產品經理發展前景如何?
Félicitations pour l'inscription réussie de wuxinghe
Cadence OrCAD capture "network name" is the same, but it is not connected or connected incorrectly. The usage of nodeName of liberation scheme
【编程强训2】排序子序列+倒置字符串
关于“2022年度网络安全教育线上培训”相关问题的复盘和说明
Are there any practical skills for operation and maintenance management
为什么这么多人转行产品经理?产品经理发展前景如何?
热烈祝贺五行和合酒成功挂牌
Ctfhub port scan (SSRF)
[programming training] delete public characters (hash mapping) + team competition (greedy)
女生适合学产品经理吗?有什么优势?
Webapck packaging principle -- Analysis of startup process
【LINGO】求解二次规划
ctfshow-web351(SSRF)
ctfshow-web355,356(SSRF)
[programming training 2] sorting subsequence + inverted string
[FPGA frame difference] FPGA implementation of frame difference target tracking based on vmodcam camera
EasyNVS云管理平台功能重构:支持新增用户、修改信息等
【Tikhonov】基于Tikhonov正则化的图像超分辨率重建
用手机在指南针上开户靠谱吗?这样有没有什么安全隐患