当前位置:网站首页>[PCL self study: pclvisualizer] point cloud visualization tool pclvisualizer
[PCL self study: pclvisualizer] point cloud visualization tool pclvisualizer
2022-06-27 23:39:00 【Stanford rabbit】
Point cloud visualization PCLVisualizer
One 、 What is? PCLVisualizer
PCLVisualizer yes PCL Full function visualization class of . Although it is better than CloudViewer More complicated , But it is also more powerful , Provides display normals 、 Drawing shapes and multiple views .
Two 、 Use cases
In this section, we will use the history presentation PCLVisualizer The usage and some features of , Including visual single point cloud , Adding color , Custom color , Show normals and other information 、 Multi window display and other functions .
Please refer to the following code , The notes are very clear .
/* Sample code author : Geoffrey Biggs */
#include <iostream>
#include <thread>
#include <pcl/common/angles.h> // for pcl::deg2rad
#include <pcl/features/normal_3d.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
using namespace std::chrono_literals;
// ---------------------
// ----- Display help information -----
// ---------------------
void
printUsage (const char* progName)
{
std::cout << "\n\nUsage: "<<progName<<" [options]\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-h this help\n"
<< "-s Simple visualisation example\n"
<< "-r RGB colour visualisation example\n"
<< "-c Custom colour visualisation example\n"
<< "-n Normals visualisation example\n"
<< "-a Shapes visualisation example\n"
<< "-v Viewports example\n"
<< "-i Interaction Customization example\n"
<< "\n\n";
}
pcl::visualization::PCLVisualizer::Ptr simpleVis (pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
// -------------------------------------------------
// ----- Open the 3D visualization tool PCLVisualizer And add a normal point cloud -----
// -------------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (0, 0, 0);// Set the background color
viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud");// Add a point cloud to the window sample cloud
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud"); // Set the size of a single point of the point cloud
viewer->addCoordinateSystem (1.0);// Add coordinate system
viewer->initCameraParameters (); // Initialize camera parameters
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr rgbVis (pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud)
{
// -------------------------------------------------
// ----- Open the 3D visualization tool PCLVisualizer And add RGB Color point cloud -----
// -------------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (0, 0, 0);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud); // establish RGB Point cloud handle , Used to add RGB Point cloud
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem (1.0);
viewer->initCameraParameters ();
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr customColourVis (pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
// -----------------------------------------------
// ---- Open the 3D visualization tool PCLVisualizer And add the specified color point cloud ----
// -----------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (0, 0, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 0, 255, 0); // Set the point cloud of the specified color ( green )
viewer->addPointCloud<pcl::PointXYZ> (cloud, single_color, "sample cloud");
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem (1.0);
viewer->initCameraParameters ();
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr normalsVis (
pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud, pcl::PointCloud<pcl::Normal>::ConstPtr normals)
{
// --------------------------------------------------------
// ----- Open the 3D visualization tool PCLVisualizer And add point cloud and normal -----
// --------------------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (0, 0, 0);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals, 10, 0.05, "normals");// Show normal ,10 Show only 1/10 The normal direction of the point of ,0.05 Indicates the normal display length .
viewer->addCoordinateSystem (1.0);
viewer->initCameraParameters ();
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr shapesVis (pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud)
{
// --------------------------------------------
// ----- Open the 3D visualization tool PCLVisualizer And add a point cloud -----
// --------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
106 viewer->setBackgroundColor (0, 0, 0);
107 pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
108 viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");
109 viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->addCoordinateSystem (1.0);
viewer->initCameraParameters ();
//------------------------------------
//-----Add Add point cloud of specified shape -----
//------------------------------------
viewer->addLine<pcl::PointXYZRGB> ((*cloud)[0],
(*cloud)[cloud->size() - 1], "line"); // Add a linear point cloud ( The connection between the first point and the last point of the point cloud )
viewer->addSphere ((*cloud)[0], 0.2, 0.5, 0.5, 0.0, "sphere");
// Add a spherical point cloud , The center is the first point position , The radius is 0.5, The last three parameters are color
//---------------------------------------
//----- Add shapes in other places -----
//---------------------------------------
pcl::ModelCoefficients coeffs; // Add polynomial coefficients to the model
coeffs.values.push_back (0.0);
coeffs.values.push_back (0.0);
coeffs.values.push_back (1.0);
coeffs.values.push_back (0.0);
viewer->addPlane (coeffs, "plane"); // 4 A coefficient of ABCD You can define a plane
coeffs.values.clear ();
coeffs.values.push_back (0.3);
coeffs.values.push_back (0.3);
coeffs.values.push_back (0.0);
coeffs.values.push_back (0.0);
coeffs.values.push_back (1.0);
coeffs.values.push_back (0.0);
coeffs.values.push_back (5.0);
viewer->addCone (coeffs, "cone"); // 7 A coefficient of ABCDEFG You can define a cone
return (viewer);
}
pcl::visualization::PCLVisualizer::Ptr viewportsVis (
pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud, pcl::PointCloud<pcl::Normal>::ConstPtr normals1, pcl::PointCloud<pcl::Normal>::ConstPtr normals2)
{
// --------------------------------------------------------
// ----- Add different point clouds and normal directions in the same window and display them side by side -----
// --------------------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->initCameraParameters ();
int v1(0);
viewer->createViewPort(0.0, 0.0, 0.5, 1.0, v1); // Add perspective V1, The four parameters are X Axis and Y The maximum and minimum display range of the axis
viewer->setBackgroundColor (0, 0, 0, v1);
viewer->addText("Radius: 0.01", 10, 10, "v1 text", v1);
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud1", v1);
int v2(0);
viewer->createViewPort(0.5, 0.0, 1.0, 1.0, v2);
viewer->setBackgroundColor (0.3, 0.3, 0.3, v2);
viewer->addText("Radius: 0.1", 10, 10, "v2 text", v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZRGB> single_color(cloud, 0, 255, 0);
viewer->addPointCloud<pcl::PointXYZRGB> (cloud, single_color, "sample cloud2", v2);
viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud1");
167 viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud2");
viewer->addCoordinateSystem (1.0);
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals1, 10, 0.05, "normals1", v1);
viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals2, 10, 0.05, "normals2", v2);
return (viewer);
}
// The following is the keyboard input response
unsigned int text_id = 0;
void keyboardEventOccurred (const pcl::visualization::KeyboardEvent &event,
void* viewer_void)
{
pcl::visualization::PCLVisualizer *viewer = static_cast<pcl::visualization::PCLVisualizer *> (viewer_void);
if (event.getKeySym () == "r" && event.keyDown ())
{
std::cout << "r was pressed => removing all text" << std::endl;
char str[512];
for (unsigned int i = 0; i < text_id; ++i)
{
sprintf (str, "text#%03d", i);
viewer->removeShape (str);
}
text_id = 0;
}
}
// Mouse event response
void mouseEventOccurred (const pcl::visualization::MouseEvent &event,
void* viewer_void)
{
pcl::visualization::PCLVisualizer *viewer = static_cast<pcl::visualization::PCLVisualizer *> (viewer_void);
if (event.getButton () == pcl::visualization::MouseEvent::LeftButton &&
event.getType () == pcl::visualization::MouseEvent::MouseButtonRelease)
{
std::cout << "Left mouse button released at position (" << event.getX () << ", " << event.getY () << ")" << std::endl;
char str[512];
sprintf (str, "text#%03d", text_id ++);
viewer->addText ("clicked here", event.getX (), event.getY (), str);
}
}
pcl::visualization::PCLVisualizer::Ptr interactionCustomizationVis ()
{
pcl::visualization::PCLVisualizer::Ptr viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (0, 0, 0);
viewer->addCoordinateSystem (1.0);
// Register keyboard and mouse response callback functions
viewer->registerKeyboardCallback (keyboardEventOccurred, (void*)viewer.get ());
viewer->registerMouseCallback (mouseEventOccurred, (void*)viewer.get ());
return (viewer);
}
// --------------
// -----Main-----
// --------------
int
main (int argc, char** argv)
{
// --------------------------------------
// ----- Command line parsing -----
// --------------------------------------
if (pcl::console::find_argument (argc, argv, "-h") >= 0)
{
printUsage (argv[0]);
return 0;
}
bool simple(false), rgb(false), custom_c(false), normals(false),
shapes(false), viewports(false), interaction_customization(false);
if (pcl::console::find_argument (argc, argv, "-s") >= 0)
{
simple = true;
std::cout << "Simple visualisation example\n";
}
else if (pcl::console::find_argument (argc, argv, "-c") >= 0)
{
custom_c = true;
std::cout << "Custom colour visualisation example\n";
}
else if (pcl::console::find_argument (argc, argv, "-r") >= 0)
{
rgb = true;
std::cout << "RGB colour visualisation example\n";
}
else if (pcl::console::find_argument (argc, argv, "-n") >= 0)
{
normals = true;
std::cout << "Normals visualisation example\n";
}
else if (pcl::console::find_argument (argc, argv, "-a") >= 0)
{
shapes = true;
std::cout << "Shapes visualisation example\n";
}
else if (pcl::console::find_argument (argc, argv, "-v") >= 0)
{
viewports = true;
std::cout << "Viewports example\n";
}
else if (pcl::console::find_argument (argc, argv, "-i") >= 0)
{
interaction_customization = true;
std::cout << "Interaction Customization example\n";
}
else
{
printUsage (argv[0]);
return 0;
}
// ------------------------------------
// ----- Create a sample point cloud -----
// ------------------------------------
pcl::PointCloud<pcl::PointXYZ>::Ptr basic_cloud_ptr (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);
std::cout << "Generating example point clouds.\n\n";
// We're going to make an edge z Axis extruded ellipse .XYZRGB The color of the cloud will gradually change from red to green to blue .
std::uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZ basic_point;
basic_point.x = 0.5 * std::cos (pcl::deg2rad(angle));
basic_point.y = sinf (pcl::deg2rad(angle));
basic_point.z = z;
basic_cloud_ptr->points.push_back(basic_point);
pcl::PointXYZRGB point;
point.x = basic_point.x;
point.y = basic_point.y;
point.z = basic_point.z;
point.r = r;
point.g = g;
point.b = b;
point_cloud_ptr->points.push_back (point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
basic_cloud_ptr->width = basic_cloud_ptr->size ();
basic_cloud_ptr->height = 1;
point_cloud_ptr->width = point_cloud_ptr->size ();
point_cloud_ptr->height = 1;
// ----------------------------------------------------------------
// ----- Calculate the normal direction of the surface , Search radius 0.05-----
// ----------------------------------------------------------------
pcl::NormalEstimation<pcl::PointXYZRGB, pcl::Normal> ne;
ne.setInputCloud (point_cloud_ptr);
pcl::search::KdTree<pcl::PointXYZRGB>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZRGB> ());
ne.setSearchMethod (tree);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals1 (new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch (0.05);
ne.compute (*cloud_normals1);
// ---------------------------------------------------------------
// ----- Calculate the normal direction of the surface , Search radius 0.1-----
// ---------------------------------------------------------------
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals2 (new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch (0.1);
ne.compute (*cloud_normals2);
// Start displaying point clouds
pcl::visualization::PCLVisualizer::Ptr viewer;
if (simple)
{
viewer = simpleVis(basic_cloud_ptr);
}
else if (rgb)
{
viewer = rgbVis(point_cloud_ptr);
}
else if (custom_c)
{
viewer = customColourVis(basic_cloud_ptr);
}
else if (normals)
{
viewer = normalsVis(point_cloud_ptr, cloud_normals2);
}
else if (shapes)
{
viewer = shapesVis(point_cloud_ptr);
}
else if (viewports)
{
viewer = viewportsVis(point_cloud_ptr, cloud_normals1, cloud_normals2);
}
else if (interaction_customization)
{
viewer = interactionCustomizationVis();
}
//--------------------
// -----Main loop-----
//--------------------
while (!viewer->wasStopped ())
{
viewer->spinOnce (100);
std::this_thread::sleep_for(100ms);
}
}
The view of the above operation is shown below :
1. Ordinary point cloud 
2.RGB Point cloud 
3. Monochromatic point cloud 
4.RGB Point cloud with normal 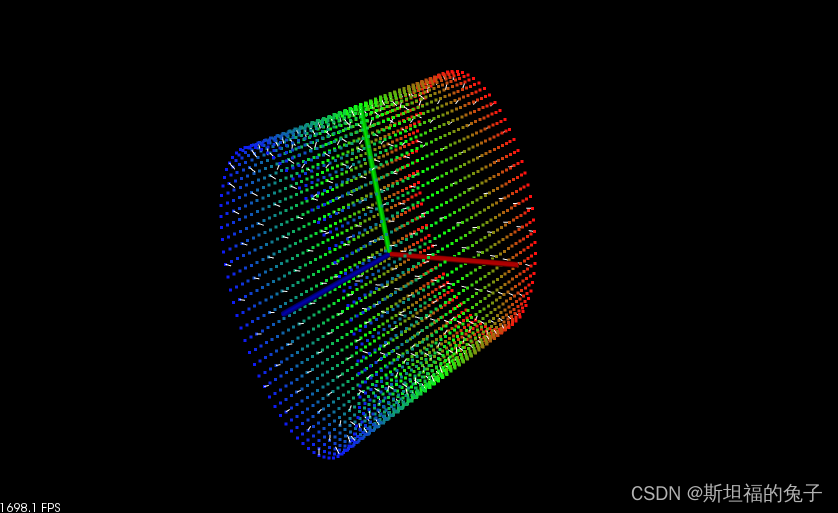
5.RGB Point cloud with normal , And create lines 、 Conic and spherical point clouds 
6. Two point clouds in one view 
7. Mouse response and keyboard response 
【 About bloggers 】
Stanford rabbit , male , Master of engineering, Tianjin University . Since graduation, I have been engaged in optical three-dimensional imaging and point cloud processing . Because the three-dimensional processing library used in work is the internal library of the company , Not universally applicable , So I learned to open source by myself PCL Library and its related mathematical knowledge for use . I would like to share the self-study process with you .
Bloggers lack of talent and knowledge , Not yet able to guide , If you have any questions, please leave a message in the comments section for everyone to discuss .
边栏推荐
猜你喜欢

消除el-image图片周围间隙

发射,接收天线方向图

【tinyriscv verilator】分支移植到正点原子达芬奇开发板

Usage of vivado vio IP

How vivado adds timing constraints

电子科大(申恒涛团队)&京东AI(梅涛团队)提出用于视频问答的结构化双流注意网络,性能SOTA!优于基于双视频表示的方法!

clickonce 部署ClickOnce应用程序时出错-清单中的引用与下载的程序集的标识不匹配

What if Fiddler fails to listen to the interface

官宣!Apache Doris 从 Apache 孵化器毕业,正式成为 Apache 顶级项目!

Halcon's region: features of multiple regions (6)
随机推荐
打造南沙“强芯”,南沙首届IC Nansha大会召开
Windows环境下的ELK——Logstash+Mysql(4)
Sentinel
树莓派(以及各种派)使用指南
超纲练习题不超纲
【PCL自学:Segmentation4】基于Min-Cut点云分割
实践torch.fx:基于Pytorch的模型优化量化神器
[try to hack] kill evaluation
webService
virtualbox扩展动态磁盘大小的坑
图的存储结构
C# Winform 读取Resources图片
MSP430F5529 单片机 读取 GY-906 红外温度传感器
EXCEL 打印设置公共表头
小芯片chiplet技术杂谈
消除el-image图片周围间隙
How vivado adds timing constraints
在线JSON转PlainText工具
matlab axis坐标轴相关设置详解
apipost脚本使用讲解一~全局变量