当前位置:网站首页>基于谱加权的波束方向图分析
基于谱加权的波束方向图分析
2022-06-10 18:06:00 【执手人间】
谱加权
本篇文章主要分析线列阵,下式给出了 u u u空间的波束方向图的推导公式
B u ( u ) = ω H v u ( u ) = e − j N − 1 2 2 π d λ u ∑ n = 0 N − 1 ω n ∗ e j n 2 π d λ u B_u(u)=\omega^Hv_u(u)=e^{-j\frac{N-1}{2}\frac{2\pi d}{\lambda}u}\sum_{n=0}^{N-1}\omega^*_ne^{jn\frac{2\pi d}{\lambda}u} Bu(u)=ωHvu(u)=e−j2N−1λ2πdun=0∑N−1ωn∗ejnλ2πdu
我们可以看到,波束方向图是权值与流形矢量的数量积,本篇文章主要分析不同的权值对波束方向图产生的不同影响,因为以下考虑的权值全部为实对称的,所以可以把n个阵元的位置用下面的标号代替 n ~ = n − N − 1 2 , n = 0 , 1 , ⋯ , N − 1 \tilde{n}=n-\frac{N-1}{2},n=0,1,\cdots,N-1 n~=n−2N−1,n=0,1,⋯,N−1
cosine加权
考虑N为奇数的情况,cosine的权值为 ω ( n ~ ) = s i n ( π 2 N ) c o s ( π n ~ N ) , − N − 1 2 ≤ n ~ ≤ N − 1 2 \omega(\tilde{n})=sin(\frac{\pi}{2N})cos(\pi\frac{\tilde{n}}{N}),-\frac{N-1}{2}\leq \tilde{n}\leq\frac{N-1}{2} ω(n~)=sin(2Nπ)cos(πNn~),−2N−1≤n~≤2N−1
其中 s i n ( π 2 N ) sin(\frac{\pi}{2N}) sin(2Nπ)是一个常数,目的是为了是的 B u ( 0 ) = 1 , 把 c o s i n e 写 成 指 数 形 式 , 逐 步 变 形 最 终 可 以 得 到 B_u(0)=1,把cosine写成指数形式,逐步变形最终可以得到 Bu(0)=1,把cosine写成指数形式,逐步变形最终可以得到
B u ( u ) = 1 2 s i n ( π 2 N ) { s i n ( N π 2 ( u − 1 N ) ) s i n ( π 2 ( u − 1 N ) ) + s i n ( N π 2 ( u + 1 N ) ) s i n ( π 2 ( u + 1 N ) ) } B_u(u)=\frac{1}{2}sin(\frac{\pi}{2N})\{\frac{sin(\frac{N\pi}{2}(u-\frac{1}{N}))}{sin(\frac{\pi}{2}(u-\frac{1}{N}))}+\frac{sin(\frac{N\pi}{2}(u+\frac{1}{N}))}{sin(\frac{\pi}{2}(u+\frac{1}{N}))}\} Bu(u)=21sin(2Nπ){ sin(2π(u−N1))sin(2Nπ(u−N1))+sin(2π(u+N1))sin(2Nπ(u+N1))}
我们可以直接利用计算机的计算能力,让其帮助我们处理权值与流形矢量的乘积,下面给出结果
我们可以看到旁瓣变得更低,而主瓣也变宽了,下面看一下各项数据的对比
matlab代码
clear all
close all
M=11;
d=0.5; % sensor spacing wrt wavelength
D = [-(M-1)/2:1:(M-1)/2]*d; % sensor positions in wavelengths
% weights, normalized so that w(0)=1
W_unf = ones(1,M);
W_cos = cos(pi*D*2/M);
% Beampatterns
u = [0:0.001:1];
A = exp(-j*2*pi*D.'*u);
G_unf = W_unf*A;
G_unf = G_unf/(max(abs(G_unf)));
G_cos = W_cos*A;
G_cos = G_cos/(max(abs(G_cos)));
figure
% array only
clf
plot(u,20*log10(abs(G_unf)),'--')
hold on
plot(u,20*log10(abs(G_cos)),'-')
hold off
axis([0 1 -80 0])
%title([int2str(M) ' element array'])
h=legend('Uniform','Cosine');
set(h,'Fontsize',12)
xlabel('\it u','Fontsize',14)
ylabel('Beam pattern (dB)','Fontsize',14)
升余弦加权
权值 ω ( n ~ ) = c ( p ) ( p + ( 1 − p ) c o s ( π n ~ N ) ) , n ~ = − N − 1 2 , ⋯ , N − 1 2 \omega(\tilde n)=c(p)(p+(1-p)cos(\pi\frac{\tilde n}{N})),\tilde n =-\frac{N-1}{2}, \cdots,\frac{N-1}{2} ω(n~)=c(p)(p+(1−p)cos(πNn~)),n~=−2N−1,⋯,2N−1
其中 c ( p ) c(p) c(p)是一个常数,使得 B u ( 0 ) = 1 B_u(0)=1 Bu(0)=1 c ( p ) = p N + ( 1 − p ) 2 s i n ( π 2 N ) c(p)=\frac{p}{N}+\frac{(1-p)}{2}sin(\frac{\pi}{2N}) c(p)=Np+2(1−p)sin(2Nπ)
下图给出了 p = 0.31 , 0.17 , 0 p=0.31,0.17,0 p=0.31,0.17,0时的波束方向图
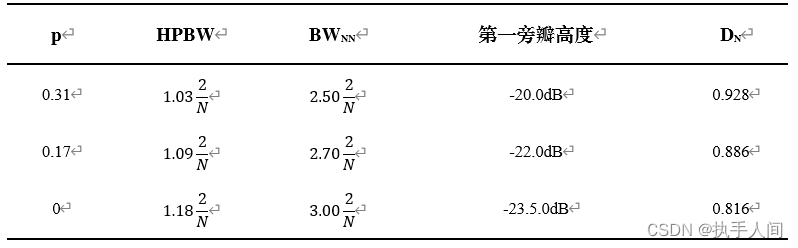
当 p p p减小时,第一旁瓣的高度减小,主波束宽度增加,所以我们已经可以使得HPBW变窄,并使得第一旁瓣比均匀分布的情况要低得多
matlab代码
clear all
close all
M=11;
d=0.5; % sensor spacing wrt wavelength
D = [-(M-1)/2:1:(M-1)/2]*d; % sensor positions in wavelengths
% weights, normalized so that w(0)=1
p=[0;0.17;0.31;1];
W_rcos = p*ones(1,M)+(ones(4,1)-p)*cos(pi*D*2/M);
% Beampatterns
u = [0:0.001:1];
c=p+(ones(4,1)-p)*2/pi;
A = exp(-j*2*pi*D.'*u);
G_rcos = W_rcos*A;
for m=1:4
G_rcos(m,:) = G_rcos(m,:)/(max(abs(G_rcos(m,:))));
end
figure
clf
plot(u,20*log10(abs(G_rcos(3,:))),'-.')
hold on
plot(u,20*log10(abs(G_rcos(2,:))),'--')
plot(u,20*log10(abs(G_rcos(1,:))),'-')
hold off
axis([0 1 -80 0])
h=legend('{\it p}=0.31','{\it p}=0.17','{\it p}=0');
set(h,'Fontsize',12)
xlabel('\it u','Fontsize',14)
ylabel('Beam pattern (dB)','Fontsize',14)
cosinem加权
下面分析一系列cosine加权,形成 c o s m ( π n ~ N ) cos^m(\frac{\pi\tilde n}{N}) cosm(Nπn~),z阵列的权值为
ω m ( n ~ ) = { c 2 c o s 2 ( π n ~ N ) , m = 2 c 3 c o s 3 ( π n ~ N ) , m = 3 c 4 c o s 4 ( π n ~ N ) , m = 4 \omega_m(\tilde n) = \begin{cases} c_2cos^2(\frac{\pi\tilde n}{N}), & m=2 \\ c_3cos^3(\frac{\pi\tilde n}{N}), & m=3 \\ c_4cos^4(\frac{\pi\tilde n}{N}),& m=4 \\ \end{cases} ωm(n~)=⎩⎪⎨⎪⎧c2cos2(Nπn~),c3cos3(Nπn~),c4cos4(Nπn~),m=2m=3m=4
其中 c 2 , c 3 , c 4 c_2,c_3,c_4 c2,c3,c4仍旧是归一化常数
下图给出波束方向图,当m增加时,旁瓣减小,但主波束变宽

matlab代码
clear all
close all
M=11;
d=0.5; % sensor spacing wrt wavelength
D = [-(M-1)/2:1:(M-1)/2]*d; % sensor positions in wavelengths
% weights, normalized so that w(0)=1
W_cos2 = cos(pi*D*2/M).^2;
W_cos3 = cos(pi*D*2/M).^3;
W_cos4 = cos(pi*D*2/M).^4;
% Beampatterns
u = [0:0.001:1];
A = exp(-j*2*pi*D.'*u);
G_cos2 = W_cos2*A;
G_cos2 = G_cos2/(max(abs(G_cos2)));
G_cos3 = W_cos3*A;
G_cos3 = G_cos3/(max(abs(G_cos3)));
G_cos4 = W_cos4*A;
G_cos4 = G_cos4/(max(abs(G_cos4)));
figure
clf
plot(u,20*log10(abs(G_cos2)),'--')
hold on
plot(u,20*log10(abs(G_cos3)),'-')
plot(u,20*log10(abs(G_cos4)),'-.')
hold off
axis([0 1 -80 0])
h=legend('{\it m}=2','{\it m}=3','{\it m}=4');
set(h,'Fontsize',12)
xlabel('\it u','Fontsize',14)
ylabel('Beam pattern (dB)','Fontsize',14)
总结
以上分析了cosine加权及其的几种变形,总体而言,cosine加权使得主瓣的宽度变宽但使得第一旁瓣的高度变低,且在升余弦加权中,p越小这种趋势越明显,同样在cosine的m次方加权中,m越大越明显。
边栏推荐
- Huawei cloud Kunpeng devkit code migration practice
- Adobe Premiere基础-工具使用(选择工具,剃刀工具,等常用工具)(三)
- Uniapp native JS to convert the Gregorian calendar to the lunar calendar
- Error Code: 1175. You are using safe update mode and you tried to update a table without a WHERE tha
- Introduction to DB2 SQL pl
- Adobe Premiere基础-不透明度(蒙版)(十一)
- 华为云鲲鹏DevKit代码迁移实战
- afl-fuzz多线程
- 半导体硅片持续供不应求,胜高长期合约价上涨30%!
- 如何设置 SaleSmartly 以进行 Google Analytics(分析)跟踪
猜你喜欢

Form form of the uniapp uview framework, input the verification mobile number and verification micro signal

leecode27,977-双指针法

微信小程序,获取当前页面,判断当前页面是不是tabbar页面

Win7系统下无法正常安装JLINK CDC UART驱动的问题解决

5. Golang泛型与反射
Wechat applet, get the current page and judge whether the current page is a tabbar page

当前有哪些主流的全光技术方案?-下篇
干货 | 一文搞定 uiautomator2 自动化测试工具使用
Stream生成的3张方式-Lambda

商业智能BI如何帮企业降低人力、时间和管理成本?
随机推荐
Stream流的常用方法-Lambder
MySQL索引失效场景
Linked List
Adobe Premiere基础特效(卡点和转场)(四)
3. Golang并发入门
【QNX Hypervisor 2.2 用户手册】3.2.3 ACPI表和FDT
阅读micropyton源码-添加C扩展类模块(4)
"Digital transformation, data first", talk about how important data governance is to enterprises
数字化转型怎样转?朝哪转?
Semiconductor silicon continued to fall short of demand, and Shenggao's long-term contract price rose by 30%!
nfs网络挂载制作服务器镜像
低碳数据中心建设思路及未来趋势
[kuangbin]专题二十二 区间DP
AgI foundation, uncertain reasoning, subjective logic ppt2
AFL fuzzy multithreading
Cross domain error: when allowcredentials is true, allowedorigins cannot contain the special value "*“
企业数据质量管理:如何进行数据质量评估?
Adobe Premiere基础-素材嵌套(制作抖音结尾头像动画)(九)
【接口教程】EasyCVR如何通过接口设置平台级联?
C语言在底层如何对double和float压栈