当前位置:网站首页>软体按摩机器人驱动器的设计与仿真
软体按摩机器人驱动器的设计与仿真
2022-08-03 08:25:00 【米朵儿技术屋】
摘要: 为了使软体按摩机器人满足所需要的输出力要求,基于象鼻类生物结构的启发提出了一种可满足按摩输出力的软体驱动器.软体驱动器输出力主要由驱动器长度、直径和材料属性等8个内部因素及纤维线材料属性、缠绕圈数和初始编制角等4个外部因素决定.根据Hagen-Poiseuille定律分析了压强、腔室直径和驱动器长度之间的关系.通过对驱动器内部纤维线缠绕方式的讨论确定了限制其径向变形的方法.利用驱动器变形后的几何方程和力矩平衡方程建立了驱动器输出力理论模型.基于理论模型和
边栏推荐
猜你喜欢


随机推荐
WordPress主题-B2美化通用子主题商业运营版
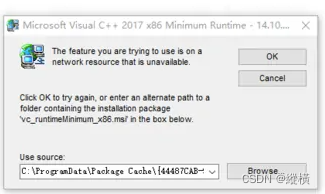
如何在安装GBase 8c数据库的时候,报错显示“Host ips belong to different cluster?
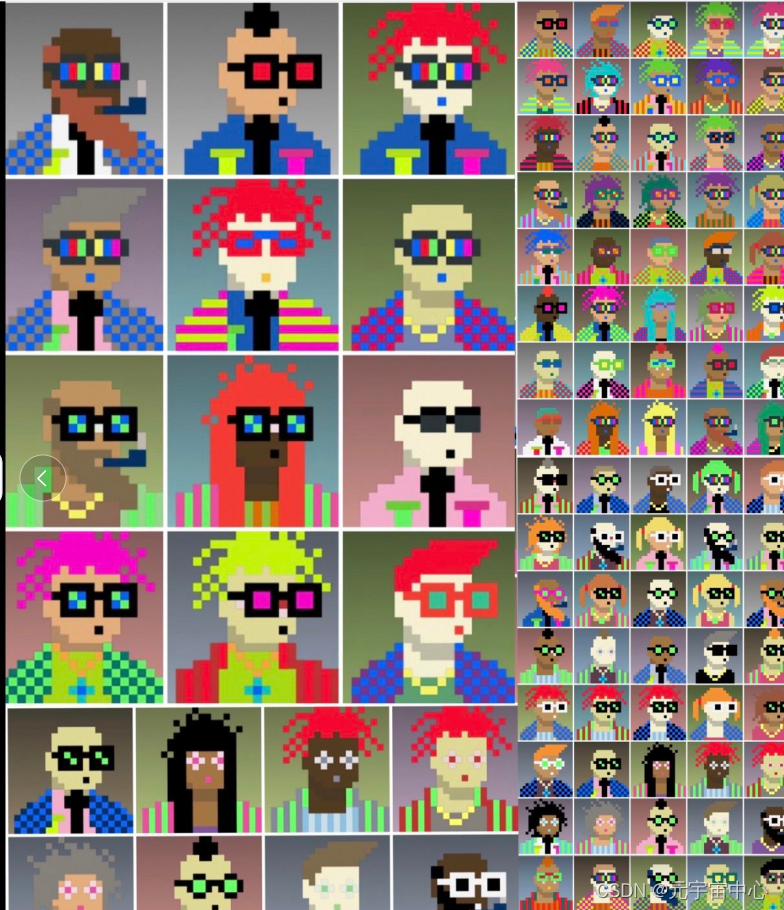
NFT到底有哪些实际用途?
day12---接口和协议
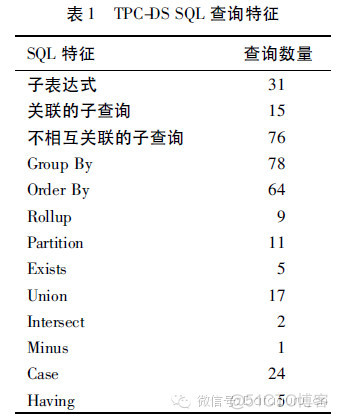
【TPC-DS】25张表的详细介绍,SQL的查询特征
线性表
QImage的指针问题
Charles抓包工具学习记录
sqlite 日期字段加一天
【Kaggle实战】泰坦尼克号生存人数预测(从零到提交到Kaggle再到模型的保存与恢复)
Poke the myth of Web3?Poke the iron plate.
netstat 及 ifconfig 是如何工作的。
ArcEngine (1) Loading vector data
RViz报错: Error subscribing: Unable to load plugin for transport ‘compressed‘解决方法
ArcEngine (six) use the tool tool to realize the zoom in, zoom out and translation of the pull box
Logic Pro X自带音色库列表
ArcEngine(一)加载矢量数据
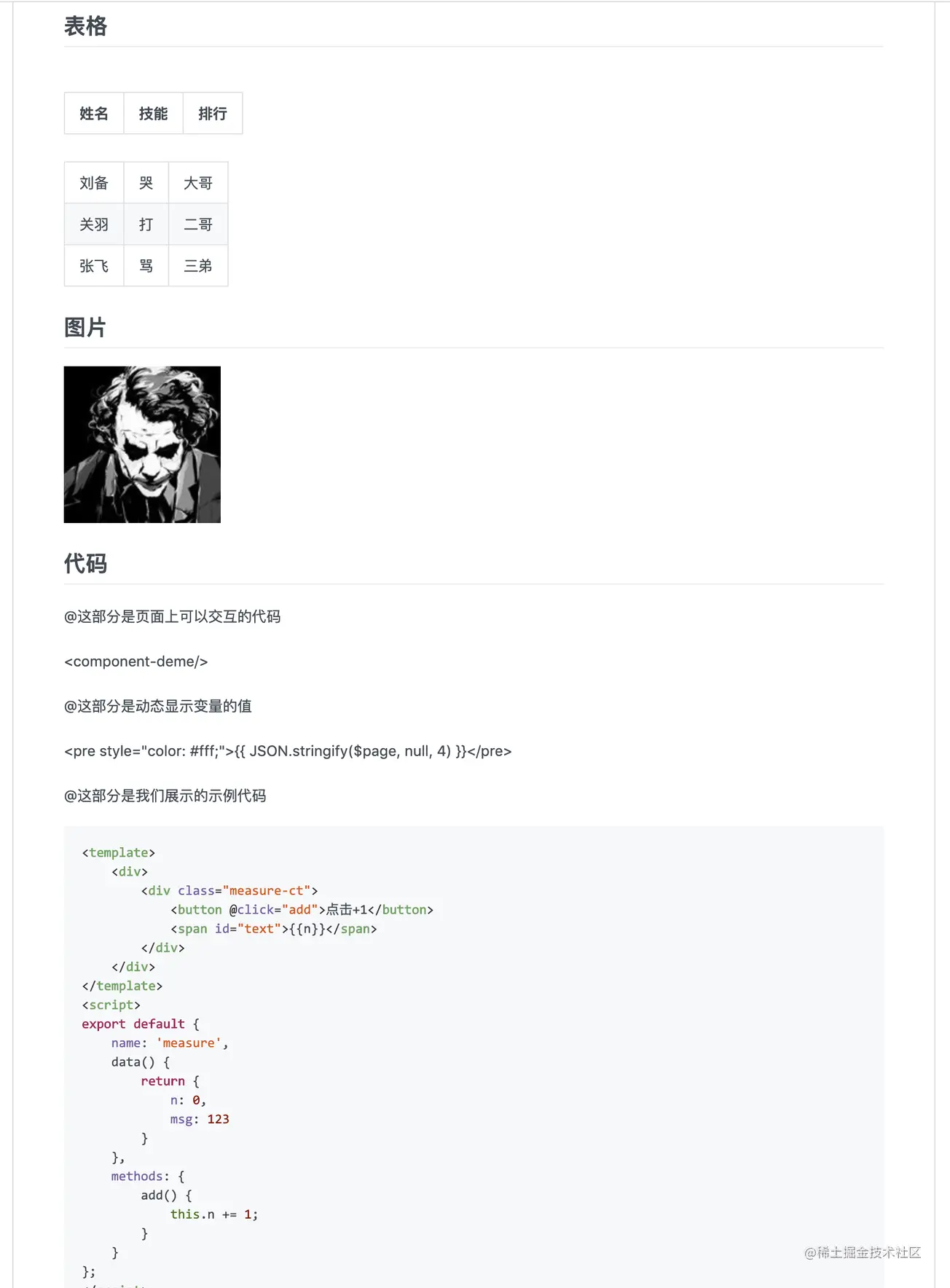
Taro框架-微信小程序-内嵌h5页面
0day_Topsec上网行为管理RCE
dflow入门2——Slices