当前位置:网站首页>Pytroch Learning Notes 6: NN network layer convolution layer
Pytroch Learning Notes 6: NN network layer convolution layer
2022-06-30 01:08:00 【Dear_ learner】
Through the previous two sections , You already know how to build a network model and how to build a very important class nn.Module And model containers Containers. There are two basic steps to build a network model : Create submodules and splice submodules . The established sub module includes convolution layer 、 Pooling layer 、 Activation layer, full connection layer, etc . So this section starts with the sub module .
One 、 Convolution and convolution
Convolution operation : Convolution kernel in the input signal ( Images ) Slide up , Multiply and add at the corresponding position ;
Convolution layer : Also known as filter , filter , It can be thought of as a pattern , A certain characteristic .
The process of convolution is similar to using a template to look for areas similar to it in an image , The more similar to the convolution pattern , The higher the activation value , So as to achieve feature extraction .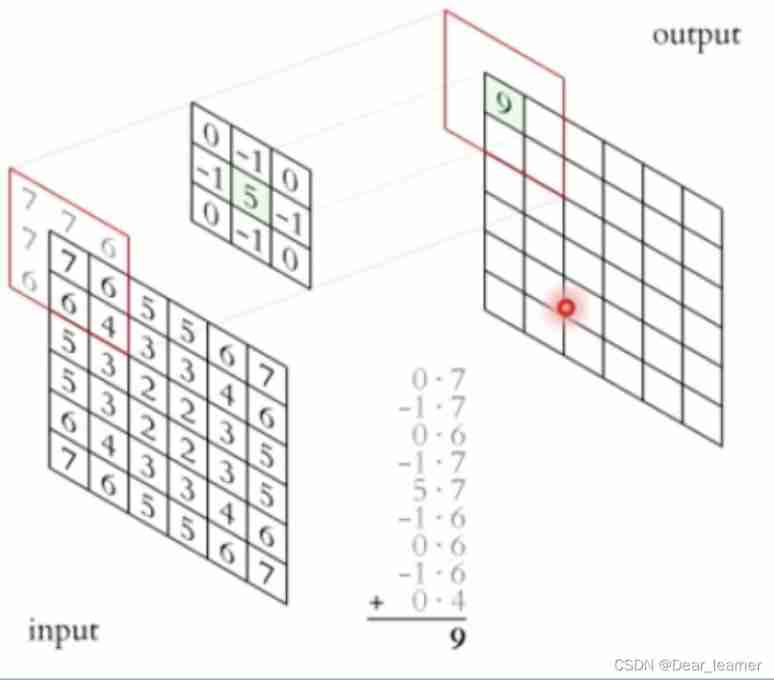
1、1d 2d 3d Convolution scheme
In general , The sliding of convolution kernel on several dimensions is called several dimensional convolution .
One dimensional convolution diagram 
Two dimensional convolution diagram 
Three dimensional convolution diagram 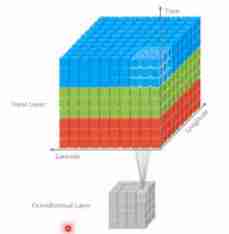
Two 、 Basic properties of convolution
Convolution kernel (Kernel): Receptive field of convolution operation , Intuitive understanding is a filter matrix , The commonly used convolution kernel size is 3×3、5×5 etc. ;
step (Stride): The pixels moved in each step when the convolution kernel traverses the feature map , If the step size is 1 Then every time you move 1 Pixel , In steps of 2 Then every time you move 2 Pixel ( That is, skip 1 Pixel ), And so on ;
fill (Padding): How to deal with the boundary of characteristic graph , There are generally two kinds of , One is not to fill the boundary completely , Convolution is performed only on input pixels , This will make the size of the output feature map smaller than the size of the input feature map ; The other is to fill outside the boundary ( Generally filled with 0), Then perform the convolution operation , In this way, the size of the output feature map can be consistent with the size of the input feature map ;
passageway (Channel): Number of channels in convolution layer ( The layer number ).
The following figure shows a convolution kernel (kernel) by 3×3、 step (stride) by 1、 fill (padding) by 1 Two dimensional convolution of :
3、 ... and 、 Calculation process of convolution
The calculation of convolution is very simple , When the convolution kernel is scanned on the input image , Multiply the convolution kernel one by one with the value of the corresponding position in the input image , Finally, sum up , The convolution result of this position is obtained . Moving convolution kernel , The convolution result of each position can be calculated . Here's the picture :
Four 、 Various types of convolution
1、 Standard convolution
(1) Two dimensional convolution ( Single channel convolution )
It has been shown in the diagram above , Represents the convolution of only one channel . The following figure shows a convolution kernel (kernel) by 3×3、 step (stride) by 1、 fill (padding) by 0 Convolution of :
(2) Two dimensional convolution ( Multichannel convolution )
Convolution with multiple channels , For example, when processing color images , Respectively for R, G, B this 3 Layer processing 3 Channel convolution , Here's the picture :
Then the convolution results of the three channels are combined ( Generally, elements are added ), Get the result of convolution , Here's the picture :
(3) Three dimensional convolution
Convolution has three dimensions ( Height 、 Width 、 passageway ), Follow the... Of the input image 3 Slide in two directions , Finally, output the three-dimensional results , Here's the picture :
(4)1x1 Convolution (1 x 1 Convolution)
When the convolution kernel size is 1x1 Convolution of time , That is, the convolution kernel becomes just one number . Here's the picture :
As can be seen from the above figure ,1x1 The function of convolution is to effectively reduce the dimension , Reduce computational complexity .1x1 Convolution in GoogLeNet It is widely used in network structure .
2、 deconvolution ( Transposition convolution )
Convolution is to extract features from the input image ( The size may become smaller ), The so-called “ deconvolution ” Is to do the opposite . But here it is “ deconvolution ” Not serious , Because it will not be completely restored to the same as the input image , Generally, the restored size is consistent with the input image , It is mainly used for upward sampling . From a mathematical point of view ,“ deconvolution ” So the convolution kernel is transformed into a sparse matrix and transposed , therefore , Also known as “ Transposition convolution ”
Here's the picture , stay 2x2 The step size applied to the input image of is 1、 Full boundary 0 Filled with 3x3 Convolution kernel , Perform transpose convolution ( deconvolution ) Calculation , The output image size after up sampling is 4x4
nn.ConvTranspose2d: Transpose convolution to realize up sampling 
The parameters are similar to those of convolution operation .
Size calculation of transpose convolution 
3、 Cavity convolution ( Expansion convolution )
To enlarge the receptive field , Insert a space between the elements in the convolution kernel to “ inflation ” kernel , formation “ Cavity convolution ”( Or expansion convolution ), And the expansion rate parameter L Indicates that you want to expand the scope of the kernel , That is, insert... Between kernel elements L-1 A space . When L=1 when , No space is inserted between kernel elements , Change to standard convolution .
The following figure shows the expansion rate L=2 The void convolution of :
Hole convolution can be understood as a convolution kernel with holes , Commonly used in image segmentation tasks , The main function is to improve the receptive field . That is, a parameter of the output image , You can see a larger area in the front image .
4、 Separable convolution
(1) Space separable convolution
Spatially separable convolution is a function of Convolution kernel It is decomposed into two independent cores to operate separately . One 3x3 The convolution kernel decomposition of is shown in the figure below :
The convolution calculation process after decomposition is shown in the following figure , First use 3x1 The convolution kernel of is used for transverse scanning calculation , Reuse 1x3 Convolution kernel for longitudinal scanning calculation , Finally, we get the result . The computation of separable convolution is less than that of standard convolution .
(2) Depth separates the convolution
Depth separable convolution consists of two steps : Deep convolution and 1x1 Convolution .
First , Apply depth convolution on the input layer . Here's the picture , Use 3 Convolution kernels , respectively, For input layer 3 Convolution calculation of two channels , Then stack them together .
Reuse 1x1 Convolution of (3 Channels ) Calculate , Only 1 The result of two channels 
Repeated many times 1x1 Convolution operation of ( The picture below shows 128 Time ), Finally, we will get a convolution result of depth .
The whole process is as follows :

chart a Represents standard convolution , Assume that the dimension of the input characteristic diagram is Df×Df×M, The size of the convolution kernel is Dk×Dk×M, The size of the output feature map is Df×Df×N, The parameter quantity of standard convolution layer is Dk×Dk×M×N.
chart b Represents depth convolution , chart c Represents fractional convolution , The combination of the two is deep separable convolution , Deep convolution is responsible for filtering , Size is Dk×Dk×1, common M individual , Act on each channel of input ; Point by point convolution is responsible for transforming the channel , Size is 1×1×M, common N individual , Acting on the output feature map of depth convolution .
The parameter quantity of depth convolution is Dk×Dk×1×M, The parameter quantity of pointwise convolution is 1×1×M×N, So the parameter quantity of deep separable convolution is the standard convolution parameter quantity ratio is :
5、 Flat convolution (Flattened convolutions)
Flat convolution is to split the standard convolution kernel into 3 individual 1x1 Convolution kernel , Then convolution calculation is performed on the input layer respectively . This way, , Follow the one in front “ Space separable convolution ” similar , Here's the picture :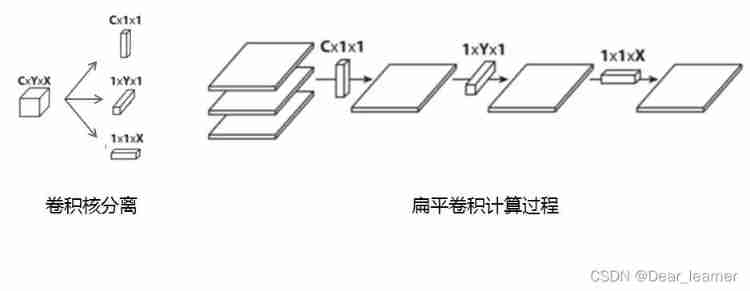
6、 Grouping convolution (Grouped Convolution)
2012 year ,AlexNet The first concept put forward in the paper , At that time, it was mainly to solve GPU The problem of insufficient memory , Put the volume integral group back into two GPU Parallel execution .
In group convolution , Convolution kernels are divided into different groups , Each group is responsible for convolution calculation of the corresponding input layer , Finally, merge . Here's the picture , The convolution kernel is divided into two groups , The convolution group of the first half is responsible for processing the input layer of the first half , The convolution group of the second half is responsible for processing the input layer of the second half , Finally, combine the results .
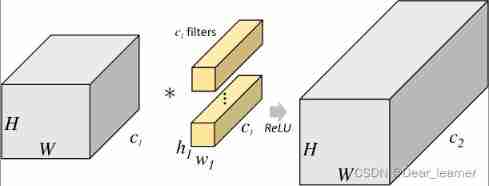

The first picture is the standard convolution operation , If the dimension of the input characteristic drawing is H×W×c1, The size of the convolution kernel is h1×w1×c1, The size of the output feature map is H×W×c2, Then the parameter quantity of the standard convolution layer is h1×w1×c1×c2.
The second picture represents the block convolution operation , The input characteristic graph is divided into... According to the number of channels g Group , Then the size of each group of characteristic drawings is H×W×(c1/g), The size of the corresponding convolution kernel is h1×w1×(c1/g), The size of the feature map output by each group is H×W×(c2/g), take g Group result stitching (concat), The size of the final output feature map is H×W×c2, At this time, the parameter quantity of the group convolution layer is :
h1×w1×(c1/g)×(c2/g)×g=h1×w1×c1×c2×(1/g)
It can be seen that the parameter quantity of the block convolution is that of the standard convolution layer (1/g)
7、 Mix wash group convolution (Shuffled Grouped Convolution)
In group convolution , After the convolution kernel is divided into several groups , The convolution results of the input layer are still combined in the original order , This hinders the flow of feature information between channel groups during training , It also weakens the feature representation . And shuffle packet convolution , That is to mix and cross the calculation results after grouping convolution and output them .
Here's the picture , Group convolution at the first layer (GConv1) After calculation , The obtained feature map shall be disassembled first , Remix crossover , Form a new result input to the layer 2 packet convolution (GConv2) in :
5、 ... and 、nn.Conv2d Realize two-dimensional convolution

function : Carry out two-dimensional convolution for multiple two-dimensional plane signals
main parameter :
- in_channels: Enter the number of channels
- out_channels: Number of output channels , It is equivalent to the number of convolution kernels
- kernel_size: Convolution kernel size , This represents the size of the convolution kernel
- stride: step , When the convolution kernel slips , Slide a few pixels at a time
- padding: Fill in the number of , Usually used to keep a size match between the input and output images ,
- dilation: Hole convolution size
- groups: Group convolution settings , Packet convolution is often used for lightweight models
- bias: bias
Size calculation :
Let's take a look at how convolution kernel extracts features
set_seed(3) # Set random seeds , Change the initialization of random weight
# ================================= load img ==================================
path_img = os.path.join(os.path.dirname(os.path.abspath(__file__)), "lena.png")
img = Image.open(path_img).convert('RGB') # 0~255
# convert to tensor
img_transform = transforms.Compose([transforms.ToTensor()])
img_tensor = img_transform(img)
img_tensor.unsqueeze_(dim=0) # C*H*W to B*C*H*W
# ================================= create convolution layer ==================================
# ================ 2d
flag = 1
# flag = 0
if flag:
conv_layer = nn.Conv2d(3, 1, 3) # input:(i, o, size) weights:(o, i , h, w)
nn.init.xavier_normal_(conv_layer.weight.data)
# calculation
img_conv = conv_layer(img_tensor)
# ================================= visualization ==================================
print(" Size before convolution :{}\n The size after convolution :{}".format(img_tensor.shape, img_conv.shape))
img_conv = transform_invert(img_conv[0, 0:1, ...], img_transform)
img_raw = transform_invert(img_tensor.squeeze(), img_transform)
plt.subplot(122).imshow(img_conv, cmap='gray')
plt.subplot(121).imshow(img_raw)
plt.show()
Output results :
On the left is the original picture , On the right is the image after two-dimensional convolution , It can be seen that it is bright in bright colors . Change the setting of random seed , To change the random initialization value of the weight , You can see the image after convolution with different convolution weights , as follows :
By setting different random seeds , It can be seen that convolution kernels with different weights represent different patterns , Focus on different features on the image , Therefore, the image features are extracted by setting multiple convolution check , You can get different characteristics .
In addition, the size of the image after convolution :
Before convolution , The image size is 512️512, After convolution , The image size is 510️5510. The convolution kernel here is set , Input channel 3, Number of convolution kernels 1, Convolution kernel size 3, nothing padding, Step length is 1, According to the formula above , Output size : (512-3)/1 + 1 = 510
Reference article :
https://my.oschina.net/u/876354/blog/3064227
边栏推荐
- I learned database at station B (V): DQL exercise
- Shell spec date format
- 【Games101】Transformation
- Go out and protect yourself
- 练习副“产品”:自制七彩提示字符串展示工具(for循环、if条件判断)
- 在线文本数字识别列表求和工具
- latex如何输入一个矩阵
- [Simulation Proteus] détection de port 8 bits 8 touches indépendantes
- UDP servers and clients in go
- Kwai reached out to the "supply side" to find the "source" of live broadcast e-commerce?
猜你喜欢

【Games101】Transformation

外包干了三年,废的一踏糊涂...
![[concurrent programming] if you use channel to solve concurrency problems?](/img/6c/76bcc9b63117bda57937a49cfd8696.jpg)
[concurrent programming] if you use channel to solve concurrency problems?

How to refuse the useless final review? Ape tutoring: it is important to find a suitable review method

How latex enters a matrix

Nested call and chained access of functions in handwritten C language
CSV文件格式——方便好用个头最小的数据传递方式

2022年最新最详细IDEA关联数据库方式、在IDEA中进行数据库的可视化操作(包含图解过程)
优秀的测试/开发程序员与普通的程序员对比......

解决choice金融终端Excel/Wps插件修复visual basic异常
随机推荐
I learned database at station B (V): DQL exercise
英伟达Jetson Nano的初步了解
快手伸手“供给侧”,找到直播电商的“源头活水”?
How to customize templates and quickly generate complete code in idea?
UDP servers and clients in go
How to refuse the useless final review? Ape tutoring: it is important to find a suitable review method
【Games101】Transformation
2020-12-03
Text classification using huggingface
MySQL installation steps (detailed)
The listing of Symantec electronic sprint technology innovation board: it plans to raise 623million yuan, with a total of 64 patent applications
MES管理系统功能模块之质量管理
Reading is the cheapest noble
【Proteus仿真】8位端口检测8独立按键
DL: deep learning model optimization model training skills summary timely automatic adjustment of learning rate implementation code
Good test / development programmers vs. average programmers
Solving plane stress problem with MATLAB
The unity editor randomly generates objects. After changing the scene, the problem of object loss is solved
Vl6180x distance and light sensor hands-on experience
Cloud, IPv6 and all-optical network